

深谷技术 | 外骨骼研究综述及导纳控制分享
发布日期:2022-11-17 浏览次数:4719
近年来,随着科学技术水平的不断提高,机器人的发展趋势已经从单纯的接收指令逐渐演变为能够实现人机交互的智能机器人,而外骨骼机器人就是这样的一种能够实现人机交互系统的机器人。外骨骼机器人将人体的意图和系统的智能结合起来,并通过助力支撑增强人体的运动能力,以完成一系列的单独靠人体或者机器难以完成的任务。因此,外骨骼机器人成为近年来国内外机器人领域主要的研究热点之一。
外骨骼机器人简述
外骨骼机器人的结构一般分为三部分,分别是外骨骼系统结构、驱动系统和传感系统。驱动系统是外骨骼机器人运动的动力,一般位于机器人的关节处,它负责按照指令提供力矩来驱动机器人完成相应的动作。驱动系统的选择与控制,对整个外骨骼机器人能否顺利完成指令有着非常重要的作用。
在给外骨骼机器人选择驱动系统的时候,需要驱动系统具有优秀的动态性能,能对控制指令进行迅速的响应,并快速完成操作人员的预期动作;同时在满足负载的情况下,驱动系统的质量和体积越小越好。除此之外,驱动系统还应该具有可靠性高等特点,以保证操作人员在使用外骨骼机器人的过程中的安全性。现阶段外骨骼机器人常用的驱动方式有三种:气动驱动,液压驱动和电机驱动。从目前状况来看,采用伺服电机作为驱动装置的外骨骼还是占了较大的比重,这种方式的有点在于控制精度高,方案也比较成熟,驱动能源简单,无污染,速度变化范围大,工作效率高,响应快,具有良好的启制动和方向控制等性能,但同时也存在着直接驱动比较困难,易受外界负载影响等不足之处。
外骨骼的发展
哈迪曼(Hardiman)外骨骼手应该是世界上第一款外骨骼,由美国通用公司在美军方的资助下和康奈尔大学的学者共同制作的,采用的就是液压驱动的方式。但最终它的体积、重量太大了,行动能力低下;其次整套设备有28个链接头,任何一个出现问题都可以导致系统瘫痪,维护难度很高;最后因为科技的限制,它的移动式能源向无法产生稳定的能源,供能也很困难。这些问题都不是那个时代可以解决的,所以最终哈迪曼项目中途终止,只留下原型机放在通用公司的博物馆里。
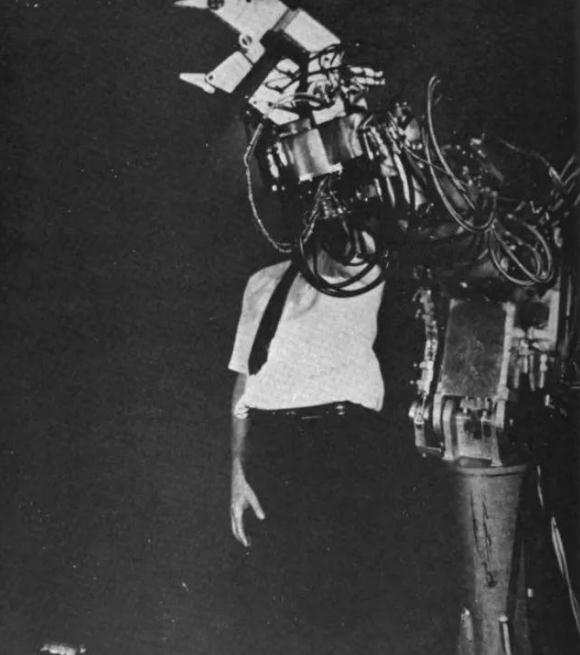
哈迪曼外骨骼手
2004年,在美国 EHPA项目计划的支持下加州大学伯克利分校研发了一款下肢外骨骼机器人 BLEEX。BLEEX 由背包、仿人型骨骼、驱动系统、感知系统组成,重约 45kg,可以帮助士兵在行走的同时增加 34kg 的负重,采用的是液压驱动,在髋关节、膝关节和踝关节都安装了液压驱动装置,全身上下共有 7 个自由度,包括髋关节和踝关节分别有三个,膝关节一个,背部一个。BLEEX 有近 40 个传感器组成的感知系统进行多方位信息融合,利用采集到的信息,系统可以预测到肢体的运动趋势。在控制算法上,采用的是位置控制加灵敏度放大的混合控制方法。
BLEXX外骨骼
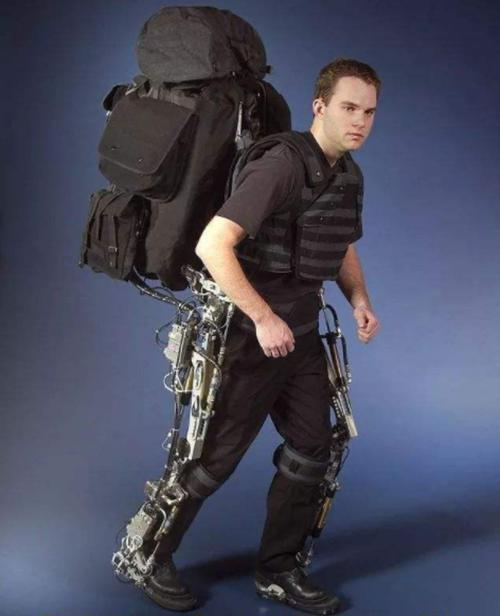
后来伯克利分校又与 Lockheed Martin 公司吸收了 BLEXX 外骨骼的精华,合力研制了一款新的下肢外骨骼机器人——人类负重外骨骼 HULC。HULC 是完成了对BLEEX液压传动等结构的改进优化,使穿戴者能够完成匍匐前进和下蹲等动作。相较于前代,HULC 有了很大的改进。HULC 轻巧简便,整套系统约重 24kg,采用电池供电,且一次充满电后,能够负重 90kg,并可以以 4.8km/h 的速度运行一个小时。踝关节采用的是被动驱动模式,仅依靠与安装在踝部的弹性材料完成踝关节的运动,大大简化了驱动结构和控制方法,且实验结果明显优于 BLEEX。液压动力组成从原本发动机驱动变成了电机驱动,采用了包含阻尼控制、助力控制在内的多种控制算法,解决了单一控制算法存在的问题。

HULC外骨骼
除了气动驱动和液压驱动的外骨骼机器人,其余基本上都是采用电机驱动方式的外骨骼机器人。比较典型是日本HAL外骨骼机器人。HAL-5 重约为 23kg,由控制系统、感知系统、驱动系统和能量系统组成。采用电机驱动方式,髋关节和膝关节各设一个自由度。控制方面,通过肌电传感器、位置传感器、力传感器检测人体的运动状态,感知人体的运动意图,通过控制和调整外骨骼机器人的运动状态,实现助力的效果。可以帮助行动不便的患者完成行走、站立、坐下、上下楼梯等动作,目前 HAL 系列机器人已在助老助残、医疗康复、物资搬运等民用领域得到了很好的应用。2014 年,Sankai 团队又推出了HAL-single 单腿型医疗康复机器人,旨在偏瘫患者的使用。
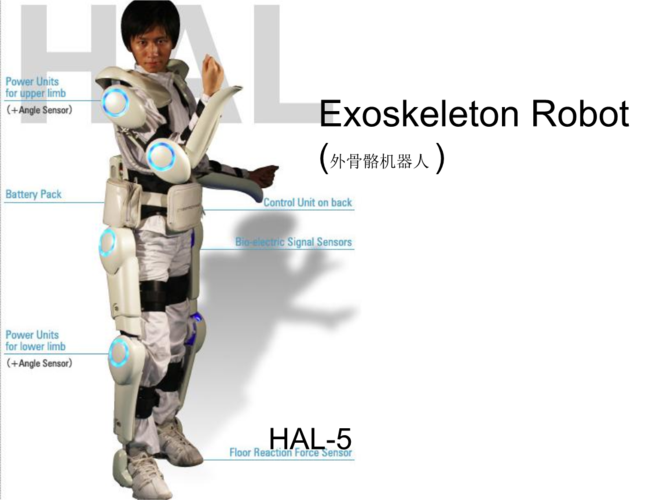

日本HAL外骨骼
我国对于外骨骼的研究起步较晚,相对于国外的技术水平也比较落后,但是我们站在前人的基础上进行研究,起点相对较高,发展速度比较快。
2004年以来,中科院合肥智能研究所就开始了外骨骼机器人的研究工作,并成功研制出了 WPAL 外骨骼机器人。WPAL 它是一款以助老助残、医疗康复为主要目的下肢外骨骼,每条腿各有 6 个自由度,分别包含髋关节 3 个自由度,膝关节、踝关节以及足底各 1 个自由度。使用电机驱动方式,髋关节和膝关节均安有电机。通过电机编码器、足底压力传感器和人机接触力传感器组成的感知系统,对信号进行检测融合,感知穿戴者的运动意图和趋势,采用的是柔顺控制算法,实现了良好跟随、助力的效果。
外骨骼导纳控制分享
阻抗控制分为基于力的阻抗控制和基于位置的阻抗控制,另一种说法是阻抗控制和导纳控制。两者都是做柔顺控制的常用方法。导纳控制,位置内环,通过检测外部力产生位置修正量,阻抗控制,力内环,通过检测位移变化,产生相应的阻抗力,两者都可以表现为柔顺性,但导纳控制更易实验。
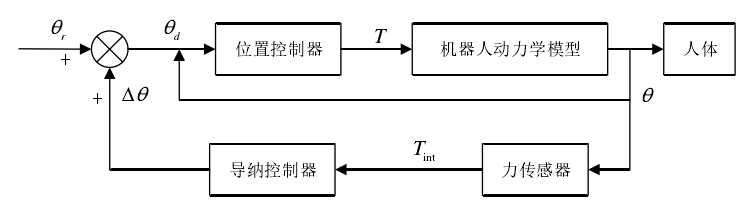
导纳算法可以简单的看作一个二阶系统。

根据以上原理,设计外骨骼机器人导纳控制器,进行实验。
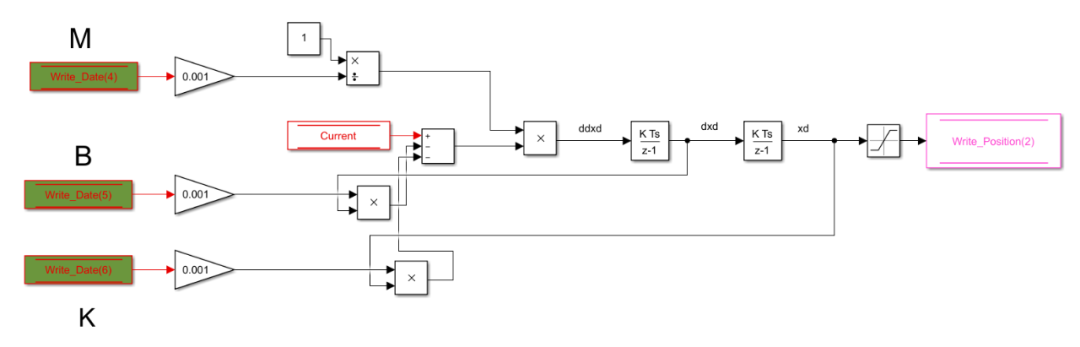
通过 MATLAB/SIMULINK 搭建了仿真模型验证导纳模型中惯性、阻尼、刚度三个参数对控制性能的影响。接着结合导纳控制理论分析了主动模式、被动模式之间的区别以及两种控制模式的主要作用。其中被动模式主要用于康复前期,通过给定参考轨迹使外骨骼带动患肢进行机械性的运动以促使患肢肌肉的激活。主动模式主要用于康复后期,不提供参考轨迹,患者按照自己的意图带动外骨骼进行运动以达到增强肌力的效果。最后结合主动控制模式和被动控制模式给出了一种主被动切换策略用以帮助患者在康复中期能够自主选择选择训练模式。
进行样机穿戴测试,发现导纳控制能够很好的进行人机协同交互,从而有效的促进人体下肢康复训练。

样机穿戴演示图


