

协作机械臂关节电机伺服驱动器
发布日期:2021-06-05 浏览次数:3740
概述
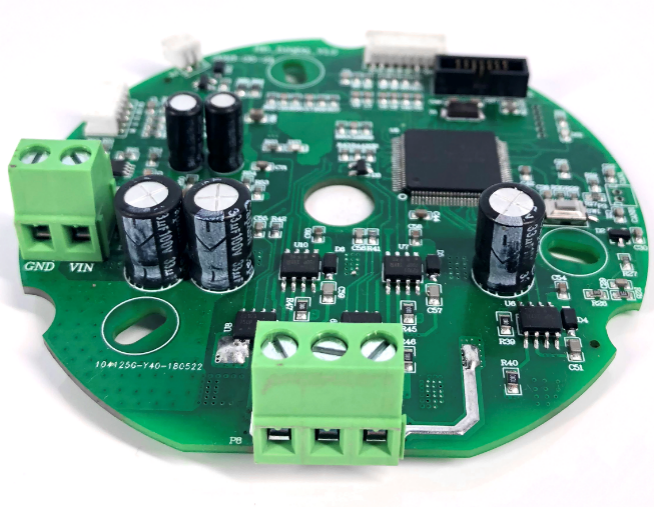
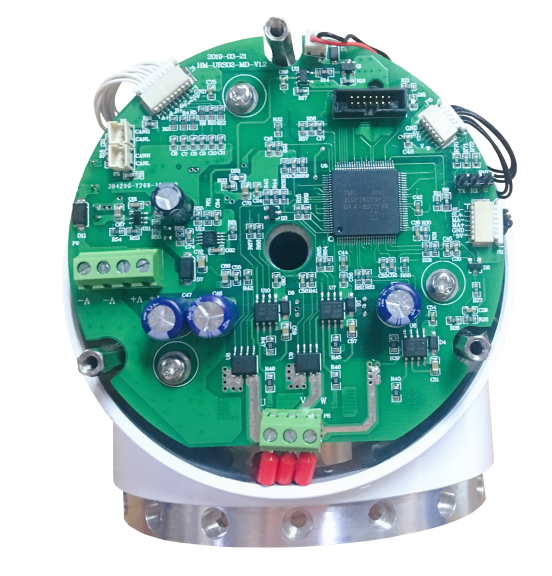
该驱动器是为协作机器人一体化关节模组设计的一款较高性能、低压、直流供电、全闭环、全数字伺服电机驱动器,采用较高性能的TI TMS320F28069 DSP芯片作为主处理器,能实现关节模组用无框力矩电机的电流、速度、位置的控制,也可以作为空心杯电机、盘式电机、外骨骼机器人等对体积有要求的伺服驱动器的使用。
该驱动器的峰值电流可以达到额定电流的二倍以上,具有较高动态性能,较大的峰值转矩,平滑的低速性能,较强的抗干扰能力,同时具备欠压、过压、过载、过流、堵转、Hall或编码器异常、缺相报警等功能。支持Hall传感器、增量式光电编码器和BISS的编码器,采用CAN、RS232接口实现对驱动器的控制。机械臂关节伺服驱动器性能可达到国内外知名品牌伺服驱动器的水平。
机械臂关节伺服驱动器体积小巧,安装简便,调试简单方便。通过驱动器调试软件,用户可以轻松匹配电机和设置伺服驱动器的基本参数,更改电机控制模式、三闭环的参数等,实现对电机的控制。
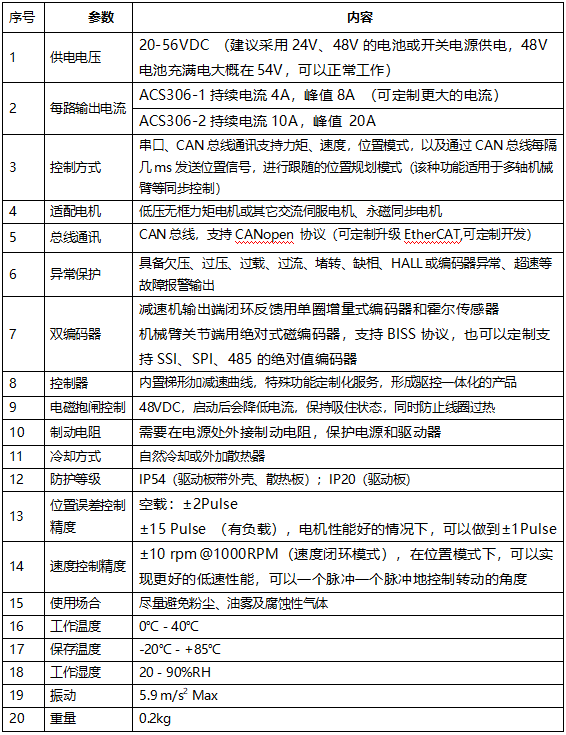
指标参数
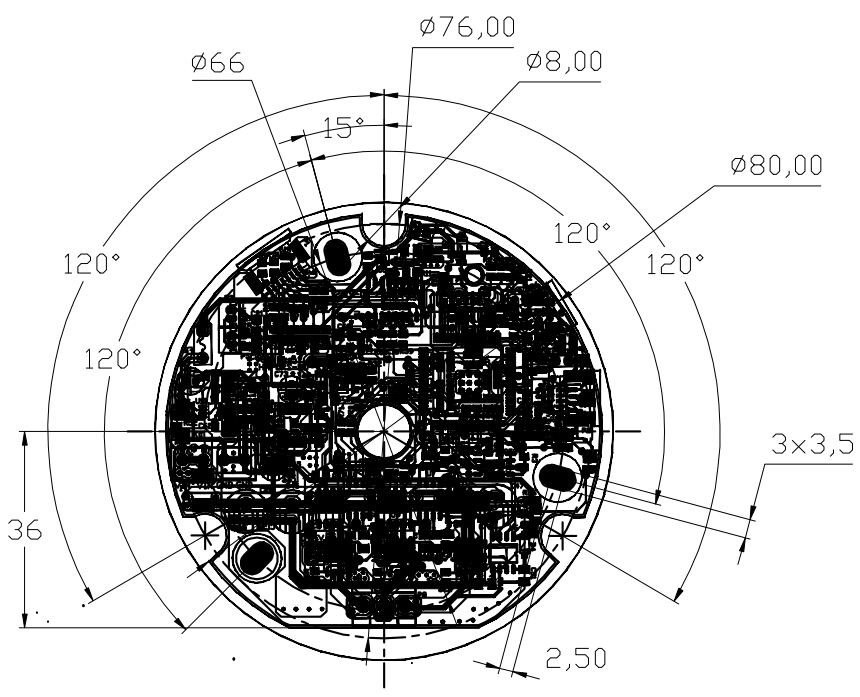
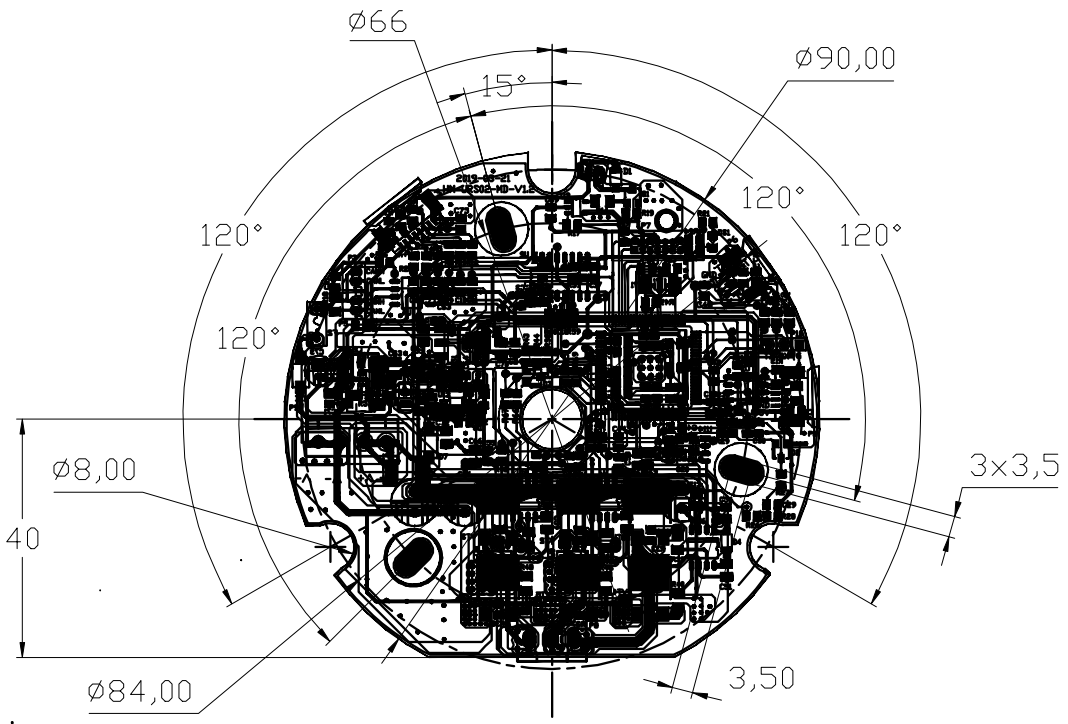
安装尺寸
电气连接
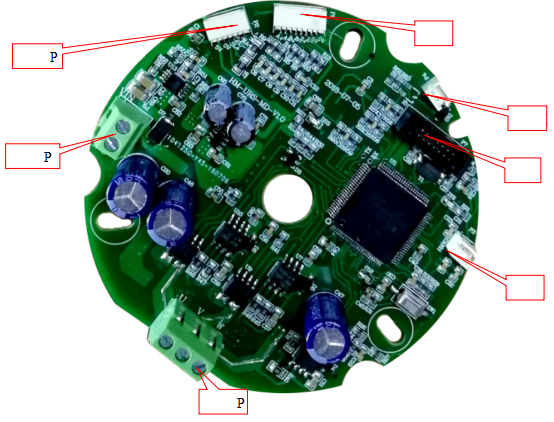
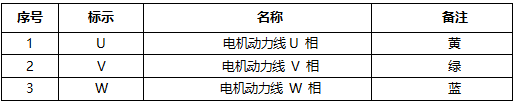
电机接口(P8) :
电源接口(P9) :

仿真器接口(P7) :

增量式编码器接口(P1):

CAN接口(P3):

绝对式磁编码器接口(P2):

自锁接口(P4):

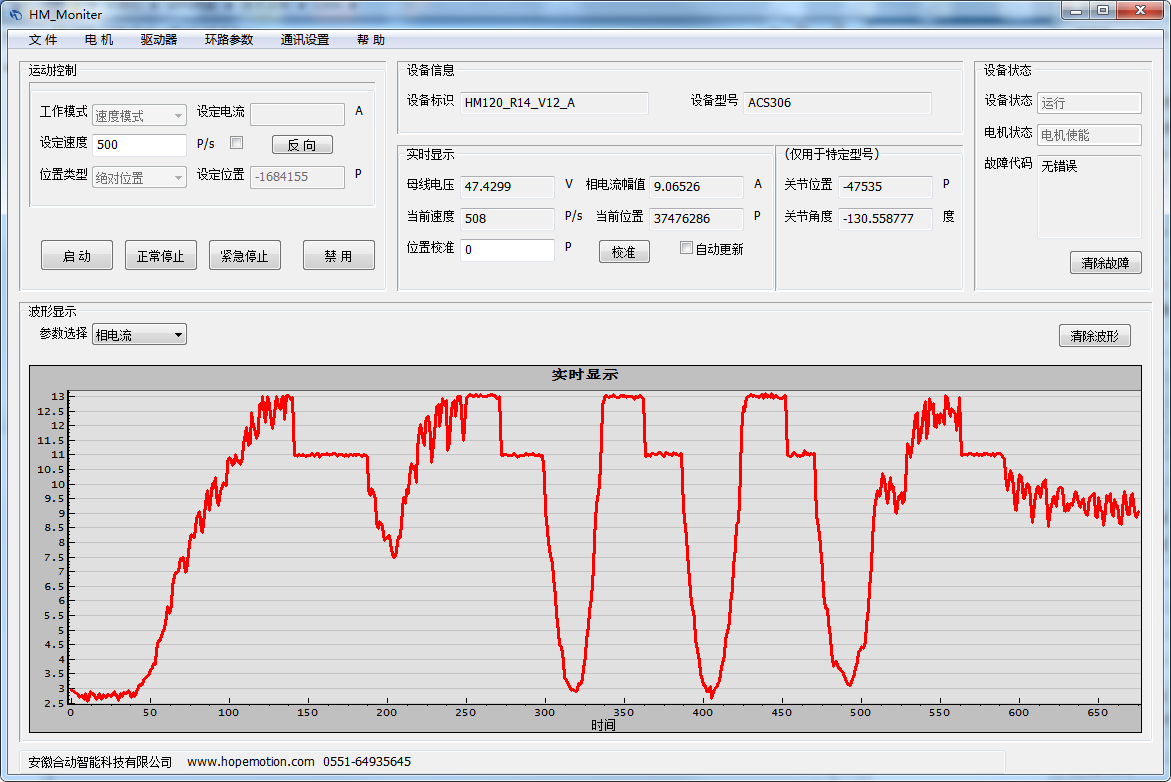
调试软件
用于设置驱动器的额定和峰值电流、极对数、反馈方式、CAN ID和三闭环的PI等参数,可以对电机进行匹配和测试,尤其重要的功能是能对三环的PI参数进行设置并且实施观测阶跃响应等效果曲线。采用RS232与驱动器进行通讯,也可以通过RS232给驱动器发送控制指令。
CAN通讯
驱动器CAN地址
驱动器的CAN地址按照CANOpen中规定,范围为1-127,0为广播地址,使用ID。驱动器的地址设置见SC指令。
CAN通信波特率
CAN通信波特率为1000Kbps,暂时不能修改。
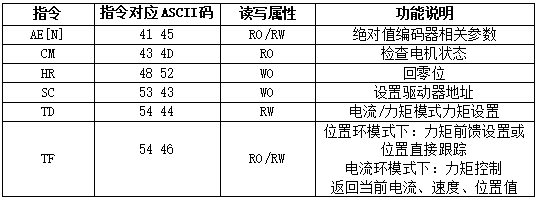
指令说明
CAN通信指令分为两部分,一部分为兼容以色列Elmo伺服驱动器的CAN通信指令,一部分为根据所需功能自定义指令,但指令格式都相同,和Elmo的CAN通信指令格式一致。
兼容以色列Elmo驱动器的CAN通讯指令

自定义指令列表(画删除线的表示指令删除,使用新的指令)
- 上一篇:直流无刷电机驱动器
- 下一篇:双交流伺服电机驱动器


