

基于模型设计开发协作机器人方法与技术线上培训圆满落幕
发布日期:2021-08-13 浏览次数:4860
为了深化产教融合,培养出能真正适应市场发展的应用型人才,2021年7月30日-8月1日,深谷学院基于模型设计开发协作机器人方法与技术线上培训如约而至。通过线上方式,让数千名学员了解协作机器人最新的技术、算法与应用。

以下是此次线上培训的精彩内容:
刘勋:将非线性控制策略与三环控制策略结合在一起,可以在实践中获取更好的效果。
深谷学院特邀讲师哈尔滨工业大学刘勋博士到来了“机器人教育与技术”的主题分享。

他围绕“机械臂学习”、“机械臂平台”、“机械臂算法”、“业界发展方向”等四个方向向学员分享了机器人运动、控制、算法所需掌握的基本知识。
机器人相关专业的学生如何选择实习就业?他表示在智能制造飞速发展下的,首先要扎实专业基础,精通资深科研方向,积极参加实践和竞赛,并做好就业规划,提前调研想入职企业的期待与要求,针对性的丰富自身能力,做好准备。
韩冰 于晓龙:机器人控制系统基础介绍
深谷学院特邀讲师北京航空航天大学杭州创新研究院韩冰于晓龙老师介绍到仿真技术是机器人研究领域中的一个重要部分。随着机器人研究的不断深入和机器人领域的不断发展,机器人仿真系统作为机器人设计和研究过程中安全可靠、灵活方便的工具,发挥着越来越重要的作用。通过仿真试验来研究机器人的各种性能和特点,已经是机器人理论研究必备的方法之一。同时,仿真试验结果也为制造机器人提供有效的参考依据。

机器人仿真的意义在于快速、低成本、高安全性地验证,包括机器人结构设计、运动控制、轨迹规划与高层次逻辑AI等工作的原理层面的有效性。提供一个一致性较好、不确定因素可控的评估对象/环境。
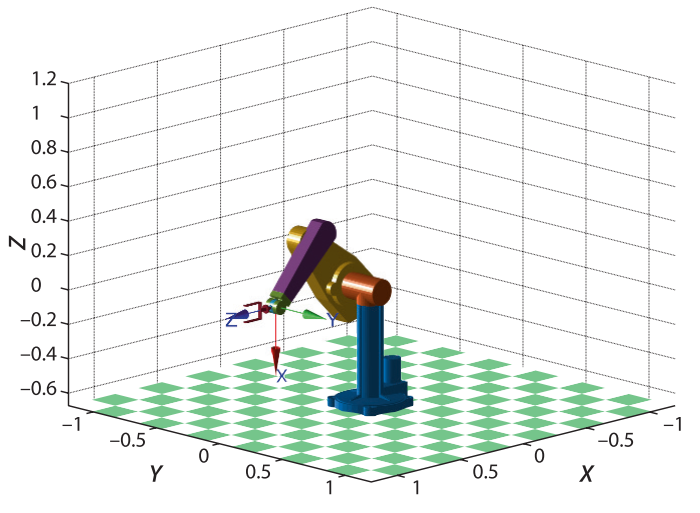
(仿真工具之MATLAB (Robotic Toolbox) (仿真工具之ROS)
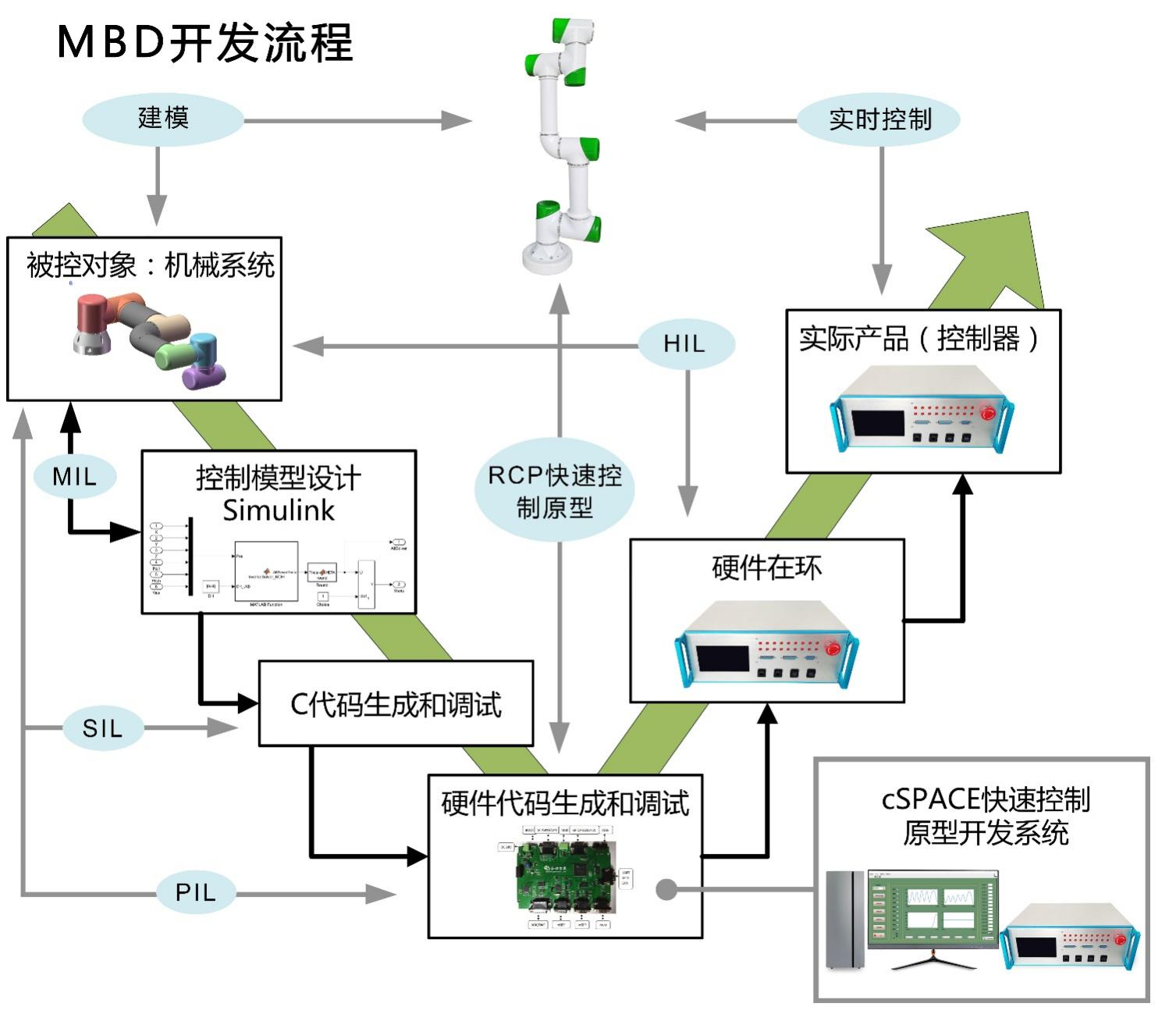
吴平志:基于MBD模型设计的工作流程可以将开发时间减少50%以上
分享技术“六轴协作臂和基于MBD的控制系统开发方法”。他表示协作机械臂将有很广泛的市场需求,但传统的机械臂开发应用是个非常复杂的系统工程,基于MBD开发方法能够高效解决这些工程难点。

鲁大岱:机械臂关节空间的轨迹规划解决机械臂从起始位姿到终止位姿去取放物体的问题
以“六轴机械臂——关节空间的轨迹规划算法设计和实时控制”为主题,围绕“关节空间的轨迹规划原理与仿真”、“关节空间的轨迹规划实时控制”两大核心内容展开培训。

“五次多项式插值方法和空间直线圆弧插补方法是基本的轨迹插补方法,我们基于MBD的开发方式直接把仿真算法应用在控制器中能实时查看运行结果,非常适合协作机械臂高级轨迹算法的开发应用。”
陈现敏:以实际案例为机器人开发提供一些思路和方法
分享“协作机器人开发经验。”他表示国外Preceyes手外科手术系统,就是采用基于模型的设计方法,在短期内建立研发流程和体系, 加速全球首款眼科手术机器人的开发。
他以团队开发的双臂(Scara)控制、并联浇铸机器人控制系统开发、5G远程驾驶控制、机械臂视觉螺丝锁付、力控监控等实际项目为例,跟学员们分享了在不同机器人研发平台建设中的经验与技巧。
他表示在面对不同的客户需求时,要结合客户实际应用场景,采用对应的控制平台,可以有效控制成本,提高机器人开发效率。

除了以上几位资深工程师之外,深谷学院其他几位讲师也带来了精彩的分享。
8月1日下午,“基于模型设计开发协作机器人方法与技术线上培训“圆满落幕,感谢各位学员的积极参与。本次课程因疫情原因采用线上直播方式,设置回放环节并分享专家老师课件资源,欢迎有需要的老师关注中科深谷微信公众号回复课程课件获取学习资源。
未来深谷学院将持续秉承“无产品不课程,能力来自实战”原则,坚持PBL理念,以“理论”+“实践”方式,融合先进工程方法(MBD+ROS+opencv+python),引导学员完成产品与项目开发计划,打造集产、学、研、转、创、用于一体人才培养新平台。


