

XYZ型机器人系统
发布日期:2021-04-27 浏览次数:5992
一、产品概述
为更好地赋能机电一体化、运动控制、伺服驱动、机器人技术的教学和研究,我司采用市场上量产的XYZ三轴点胶平台作为控制对象,采用自主的交流伺服电机驱动器、运动控制器,研发出XYZ型机器人系统产品,提供给本科教学和科研使用。核心运动控制系统和伺服驱动器全自主开发,控制软件和算法都可开源。采用基于模型设计(MBD)工程开发方法实现XYZ型机器人系统运动控制算法开发与应用,提供丰富的控制案例程序,配套有上位机监控软件,可实时修改控制参数、监控系统平台的参数,不仅方便教学,还能为深层次的XYZ机器人系统科研提供平台。

图4XYZ机器人系统
该平台有以下几大特色:
1、工业化产品:来源于点胶、锁螺丝、焊接等工业应用,不是简单的教具,可以应用于工业;
2、开放性:伺服驱动器、运动控制器底层开源,充分掌握伺服驱动、运动控制核心技术,一个平台,可以满足打通本科教学、研究生和老师的科研、工程项目应用,充分提高设备的价值;
3、开发便捷:可采用C语言、采用基于模型设计(MBD)方法在Simulink中进行驱动和控制的程序开发,快速入门、系统地掌握、便捷地验证自主算法;
4、模块化设计:机械结构、直线运动单元、点胶单元、伺服驱动、运动控制器、控制软件等符合教学、科研的设计,便于教学和组合创新;
5、配套齐全:提供详细的实验指导书、电气原理图、主要的机械图、软件,由浅入深,容易掌握;
6、本科教学:提供伺服电机、运动控制、机电一体化、机器人、CAN总线通讯等本科教学实验;
7、工程项目和科学研究:进行重力补偿、摩擦力补偿等高级动力学、精密运动控制算法的科研,充分利用该平台,满足研究生和教师科学研究和采用该平台进行工程项目研究的需求;
8、高级视觉开发:可搭配视觉检测、标定等人工智能开发套件,支撑人工智能的研究。
该系统既可以作为自动化、机器人、机械电子、智能制造、机械工程等专业中的《机器人学》、《机器人建模与仿真》、《机器人控制技术》、《计算机控制技术》、《伺服电机及控制》、《机电一体化技术》、《机器人操作系统》、《运动控制系统》等课程的配套实验平台,也同时支撑相关领域的运动学、动力学及伺服驱动算法的科研。
二、实验平台硬件组成
01 机器人本体
XYZ机器人系统平台包括本体一台,其中本体内部包含控制器1个、伺服驱动器3个、伺服电机3个以及开关电源等,实现前后直线运动的为X轴,实现左右直线运动的横线为Y轴,实现上下直线运动的为Z轴;其运动速度快、功能强大,有效载荷为5Kg。具备经济实惠、即插即用、编程简单直观、高精度、高安全性等特点,适用于各类轻型装配场合。
表1 XYZ机器人系统本体规格
|
本体规格 |
|
|
有效载荷 |
5Kg |
|
本体重量 |
60Kg |
|
重复精度 |
±0.02mm |
|
移动速度 |
200mm/s |
|
X轴有效行程 |
300mm |
|
Y轴有效行程 |
300mm |
|
Z轴有效行程 |
100mm |
|
驱动方式 |
伺服电机+同步带+直线导轨 |
|
电源 |
AC220V |
机器人本体结构尺寸如图2所示。
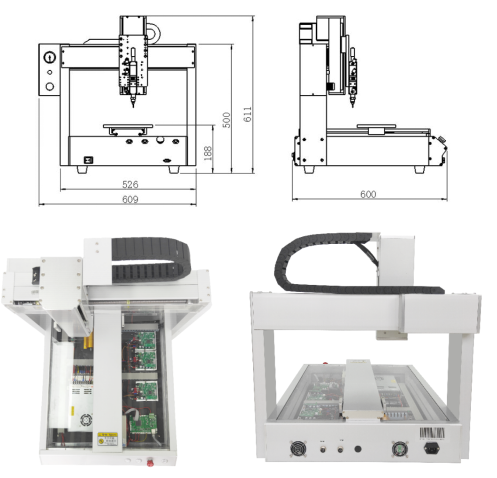
图2XYZ机器人系统实物及机械尺寸
02 机器人控制器
机器人控制器具有Simulink自动代码生成功能,拥有以上所示较丰富的硬件外设接口,以及一套功能强的监控软件。通过Matlab/Simulink对机器人控制算法进行仿真,对仿真好的控制算法,将输入、输出接口替换为控制器的Simulink的输入输出模块,编译整个模块就能自动生成DSP代码,在控制器上运行后就能生成该控制算法相应的控制信号,从而方便地实现对被控对象的控制。运行过程中通过监控软件,可实时修改控制参数,并以图形方式实时显示控制结果;采集的数据可以保存到磁盘,研究人员可利用MATLAB对这些数据进行离线处理。是搭建机器人电控系统、快速验证算法、发表论文和完成科研项目开发的控制系统开发平台。
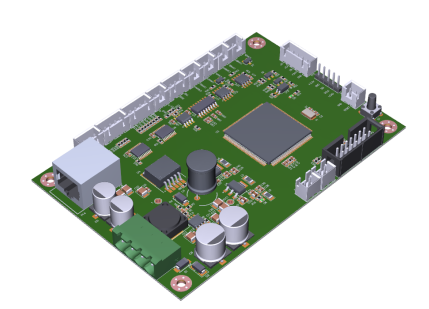
图3 控制器
表2 控制器技术参数
|
处理器 |
主处理器:TMS320F28335 DSP 32位浮点数字信号处理器;CPU时钟:150MHz |
|
视觉位置信号接口 |
可以通过RS232或485接口采集视觉处理后的目标位置信号 |
|
输入 |
IO输入输出:3通道 |
|
输出 (特定型号才具备,需要与公司沟通) |
D/A 转换器:4 通道 16 bit; 输出范围:-10~10V; 转换时间:10us |
|
编码器 (特定型号才具备,需要与公司沟通) |
数字增量编码器接口:2个独立通道 电平:TTL或者RS422输入,计数器位数:32-bit; 最大输入频率20 MHz; |
|
通讯接口 |
串行接口 1路TTL电平的SCI接口、1路485接口 CAN接口(CAN 2.0A标准) |
|
物理参数 |
工作温度:0~55℃(典型值) |
03 伺服驱动器

图4 伺服驱动器
表3 伺服驱动器主要性能参数
|
处理器 |
主处理器:TMS320F28069 DSP 32位浮点数字信号处理器;CPU时钟:90MHz |
|
供电电压 |
22V-60VDC |
|
输出相电流 |
持续电流15A,峰值30A(外加散热器) |
|
控制方式 |
CAN总线通讯,支持位置、速度和力矩模式 |
|
适配电机 |
100W-800W低压交流伺服电机、直流无刷电机、伺服轮毂电机 |
|
通讯方式 |
CAN总线(默认)、RS232 |
|
一路独立编码器 |
单圈17位绝对值RS485+AB |
|
制动电阻 |
支持。开关电源的应用场景,可以外接制动电阻,保护控制器。 |
|
冷却方式 |
自然冷却或外加散热器 |
|
防护等级 |
IP20(驱动板) |
|
使用场合 |
尽量避免粉尘、油雾及腐蚀性气体 |
|
工作温度 |
-10℃-50℃ |
|
保存温度 |
-20℃-+80℃ |
|
工作湿度 |
40-90%RH |
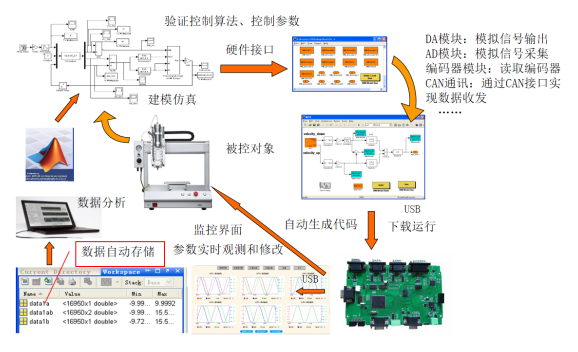
MBD开发流程
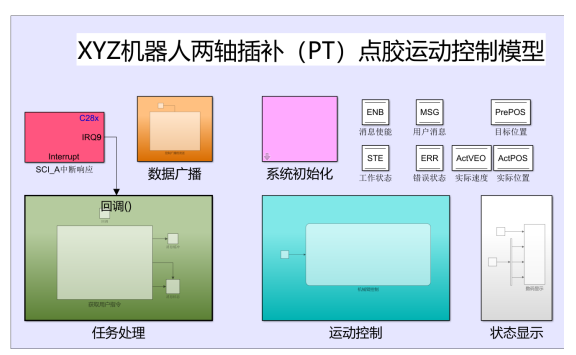
运动学Simulink控制框图
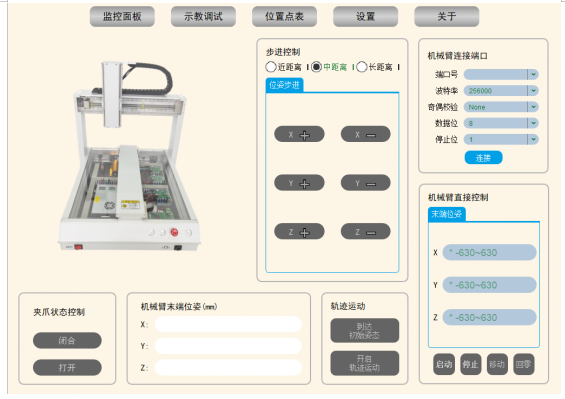
上位机监控软件
三、实验内容一览
列表4所列实验内容为可以在本平台完成的所有实验列表,所有实验程序均在Matlab/Simulink软件中编写,所有程序源代码均开放,可以自由修改,实验均配有演示视频。
表4 实验项目
|
实验类型 |
实验内容 |
实验目的 |
|
运动控制实验 |
平台认知实验 |
熟悉并掌握平台基本构造和上位机控制界面操作 |
|
单轴CAN实验 |
熟悉XYZ机器人机电系统CAN通讯指令和操作并能够单独控制各轴 |
|
|
三轴运动控制(PTP)实验 |
熟悉并掌握如何通过Simulink 搭建点到点(PTP)控制程序 |
|
|
两轴插补(PT)运动控制实验 |
熟悉并掌握如何通过Simulink 搭建两轴插补(PT)控制程序 |
|
|
工业应用场景(点胶)实验 |
掌握平台机电系统点胶工作原理,充分熟悉并掌握平台机电系统进行综合性开放实验 |
本科和研究生教学课程:
1、机器人学
2、机器人建模与仿真
3、现代控制理论
4、机器人操作系统
5、计算机控制技术
典型教材推荐:
《机器人学导论(第四版)》美国斯坦福大学John.J.Craig 教授
《机器人控制技术》陈万米,上海大学教授,博士
《计算机控制技术(第四版)》顾德英,东北大学,教授,硕导
《现代控制理论》王宏华河海大学教授,博士
《机器人技术基础》熊有伦华中科技大学教授博导,科学院院士
《MATLAB建模与仿真》 哈尔滨理工大学 副教授,硕导
支撑科研方向:
1、多自由度运动平台控制系统设计
2、三轴运动平台精密轮廓控制研究
3、三轴运动平台高速运动控制规划研究
4、XYZ三轴机器人平台运动轨迹的迭代控制
5、XYZ三轴机器人平台曲面力控制轮廓跟随研究
6、基于机器视觉的三轴运动平台高速定位控制
四、基础实验演示视频
实验1.单轴伺服CAN总线控制实验
实验2.三轴运动控制(PTP)实验
实验3.两轴插补(PT)运动控制实验
实验4.工业应用场景(点胶)实验
五、主要性能参数
|
设备名称 |
主要技术参考指标 |
|
控制器 |
主处理器:TMS320F28335 DSP 主频:150M Hz 接口:2路CAN 1路RS232接口3路IO口1路SCI接口 软件:支持Simulink和C语言开发,Simulink软件能自动生成C语言代码 提供监控软件,能实现数据的采集、保存、参数的在线修改 |
|
驱动器 |
22V-60VDC,持续电流10A,峰值20A,CAN总线通讯,支持位置、速度和力矩模式,支持低压交流伺服电机、直流无刷电机、伺服轮毂电机的驱动 |
|
交流伺服电机 |
额定电压:48V 额定功率:400W 额定转速:3000rpm 多圈绝对值编码器:17位 |
|
X轴 |
有效行程:300mm,分辨率:0.025mm |
|
Y轴 |
有效行程:300mm,分辨率:0.025mm |
|
Z轴 |
有效行程:100mm,分辨率:0.025mm |
|
其它模块 |
电源模块、USB数据线,串口芯片模块 |
|
驱动方式 |
伺服电机+同步带+直线导轨 |
|
点胶模块 |
根据实际情况配好点胶套件 |
- 上一篇:开源高精度工匠机器人系统
- 下一篇:开源6D并联机器人系统


