

可重构混联机器人机电创新系统
发布日期:2021-04-28 浏览次数:5820
产品概述
可重构混联机器人机电创新系统用来方便快捷地学习、研究串联、并联和混联机器人的控制系统架构,D-H参数设定,驱动参数调整,示教、仿真的产品平台。
该产品实验套件系统主要分为可重组混联机构组件系统和机构控制、检测与分析系统两部分。可重组混联机构组件系统的运动组件都由伺服电机驱动,伺服电机的编码器可以反馈组件的运动情况,系统中所有连杆通用、直线模组通用、旋转模组通用,可以组成超过20种不同的机器人结构或者模型。机构控制、检测与分析系统采用开放式运动控制器。
上位机通过运行基于MATLAB或者VC编程的运动控制程序控制4-8轴伺服电机,采集4-8路编码器反馈和4-8力矩反馈,在软件中控制伺服电机运动并实时采集运动信息,通过基于MATLAB或者VC编程的软件检测和分析机构运动情况。可以规划可拆装联机器人的运动路径轨迹,开展机器人运动学的分析研究
产品特点
编码器能同步采集被测对象动平台运动轨迹(位置+姿态在时间上的序列)。据此可求解动平台的运动学算法,串、并联机构的运动学模型,并通过测试平台进行测试代码开源,支持二次开发。
联结、直线、旋转模组通用,可拆解,可组合,用于搭建不同模型的串联、并联或混联机器人。
自动生成代码。
在线观测记录数据,在线修改参数。
开发概图
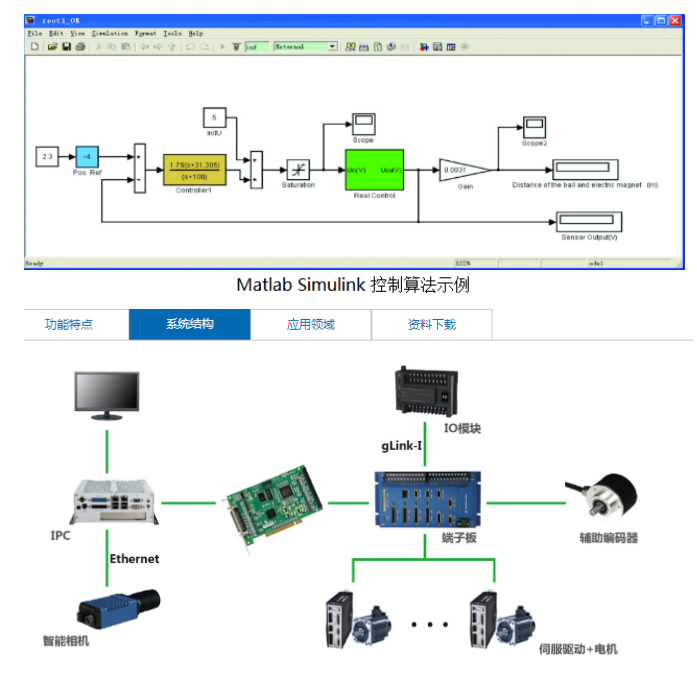
系统结构图
应用专业
自动化专业
机器人专业
机械电子
智能制造专业
机械工程专
实验内容
机器人控制系统及操作系统熟悉
电机控制器PID调节方法
电机参数调整及运动性能认识
机器人示教编程
机器人控制系统常见问题及故障排除方法练习
可拆装混联机器人模型正逆解算法练习
可拆装混联机器人运动轨迹规划练习
可拆装混联机器人系统与气动元件配合
可拆装混联机器人系统与视觉系统配合
可拆装混联机器人Tracking工艺
- 上一篇:开源三轴协作机器人
- 下一篇:开源桌面型直驱SCARA机器人


