

开源旋转电机一级倒立摆系统
发布日期:2022-05-06 浏览次数:3478
产品概述
开源旋转电机一级倒立摆(型号:RIP1)是基于TI TMS320F28335 DSP和MATLAB/Simulink开发。该平台由交流伺服电机、角度传感器、摆杆、控制系统和上位机组成。结合计算机仿真和嵌入式实时控制技术,能实现硬件在回路(HIL)和快速控制原型(RCP)设计的功能,是基于模型设计(MBD:Model-Based Design),可以完成如LQR最优控制、模糊控制、滑模控制、神经网络控制等运动控制理论相关实验的教科研平台。
该平台控制算法代码完全开源,提供典型系统的时域响应和稳定性分析、根轨迹、线性系统矫正、PID控制实验和LQR控制,以及直线电机速度控制和位置跟踪等实验内容。可以作为自动化专业、机电专业、电气专业、机器人等专业中《电机学》、《自动控制原理》、《现代控制理论》、《伺服电机与驱动技术》等课程的配套实验平台,也可作为科研工作者检验自动控制算法的科研平台。

产品特点
摆杆长度可自由伸缩,伸缩长短可定制,方便老师和学生研究在连续可变模型下的系统相关特性实验。支撑系统建模、经典控制理论、现代控制理论、最优控制和智能控制等实验;
(1)开放性。基于TI TMS320F28335 DSP和MATLAB/Simulink开放式硬件控制开发平台,研究人员可以开发自主的算法,进行控制,代码均开源,可以在生成的C代码中嵌入研究人员自己编写的代码,实现更复杂的控制算法。采用自主研发的驱动器,支持电流,速度,位置及加速度四种模式的控制。
(2)采用MBD的工程设计方法。从倒立摆的建模、自动控制算法的设计、Simulink仿真,到根据仿真的结果设计实时控制器、自动生成基于模型的代码下载到DSP控制器中进行实时控制,是采用MBD的控制方向理想教学和科研平台。
(3)创新性。通过倒立摆这种复杂的控制对象和便捷的CSPACE控制算法验证开发平台,研究人员可以更好地开发和验证自己的控制算法,产生更多的科研成果,发高水平论文。
(4)配套资料完善。内容详尽的实验教材,内容涵盖直线电机驱动器、运动控制、机电系统建模、经典控制理论实验、现代控制理论实验、最优控制实验和智能控制实验,支持PID、LQR、滑模、模糊、神经网络等控制算法。
(5)丰富的知识点:
1、数学建模:通过建立倒立摆的模型,深入理解拉格朗日系统建模方法,以及把微分方程转变为状态方程的设计方法;
2、自动控制知识:根轨迹实验、PID实验、LQR最优控制实验、模糊控制实验、滑模控制实验、阶跃响应法系统辨识、频率响应法系统辨识、超前滞后校正;
3、建模、仿真、实时控制:熟悉把学习到的高等数学、理论力学、物理学、自动控制、嵌入式系统充分结合起来,从系统建模、MATLAB/Simulink仿真到DSP实时控制实现完美结合,让研究人员充分了解如何把理论分析的结果应用于实时控制;
4、MATLAB/Simulink:利用MATLAB/Simulink工具软件,能提供的仿真和实时控制案例;
5、TI TMS320F28335 DSP的开发与应用:掌握AD、DA、SPI、IO、定时器、RS232、QEP等外设模块的开发和使用。
该系统既可以作为自动化、机器人、机械电子、智能制造、机械工程等专业中的《机电控制系统》、《自动控制原理》、《现代控制工程》、《智能控制理论》、《机器人建模与仿真》、《机器人控制技术》、《计算机控制技术》、《伺服电机及控制》、《机电一体化技术》、《运动控制系统》等课程的配套实验平台,也同时可作为相关领域的高级算法及伺服驱动算法的科研平台。
实验平台组成
开源倒立摆系统主要部件和连接关系如下图所示,分为控制系统和倒立摆本体两部分。
|
控制系统 |
倒立摆本体 |
|
由主控计算机和实时控制器(CSPACE)两部分组成。控制程序支持在Matlab/Simulink中编写、自动生成代码、自动编译下载到控制器中和运行。上位机和控制器之间采用串口通信。 |
由旋转电机和倒立摆摆杆构成。 |
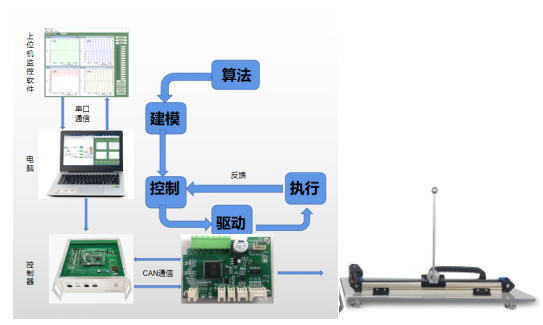
图2倒立摆平台组成
01 倒立摆本体
旋转电机倒立摆本体相关参数如下表所示。
表1倒立摆平台技术参数
|
设备名称 |
主要技术参数指标 |
|
|
底座 |
尺寸 |
长800mm 宽230mm 高55mm |
|
交流伺服电机 |
额定电压 |
36V |
|
额定扭矩 |
0.29N*m |
|
|
额定转速 |
3000rpm |
|
|
编码器分辨率 |
1000 |
|
|
摆杆 |
长度 |
350mm |
|
重量 |
0.05kg |
|
|
底座重量 |
0.38kg |
|
|
底座高度 |
25mm |
|
|
角度编码器 |
分辨率 |
2500 |
|
控制系统 |
尺寸 |
长350mm 宽350mm 高130mm |
|
电源输入 |
AC220 50Hz |
|
|
控制器 |
TMS320F28335数字信号发生器 |
|
|
控制器主频 |
150MHz |
|
|
DA转换器 |
4通道;16位;输出-10V~10V;转换时间10us |
|
|
编码器接口 |
3通道数字增量式;支持编码器或霍尔传感器 |
|
|
其他接口 |
1路USB;1路RS232 |
|
|
电机驱动器 |
ELMO HAR5/60或HAR8/100 |
|
|
电机控制模式 |
支持电流环、速度环、位置环三种模式 |
|
|
上位机 |
控制 |
15个参数实时调节 |
|
显示 |
10个参数实时波形显示 |
|
备注:1. 伺服驱动器达到9.2A的峰值电流才能输出这么大的推力,伺服驱动的额定电流为4A,故峰值推力只能达到120N左右;
2. 角度编码器为2500线的,控制器会对AB相输出的增量编码器信号进行四倍频,共有10000个脉冲每圈,分辨率为360/10000。
02 倒立摆控制系统
倒立摆控制系统是基于TMS320F28335 DSP和MATLAB/Simulink开发。拥有AD、DA、IO、Encoder、PWM、CAN、SPI等丰富的硬件外设接口,以及一套功能强大的监控软件。结合计算机仿真和嵌入式实时控制技术,能实现硬件在回路(HIL)和快速控制原型(RCP)设计的功能,也是用于进行基于模型设计(MBD:Model-Based Design)控制系统开发的教学和科研产品。cSPACE控制器如下图所示,控制器参数如表2所示,是可对标国际先进的控制与半实物仿真领域的产品。
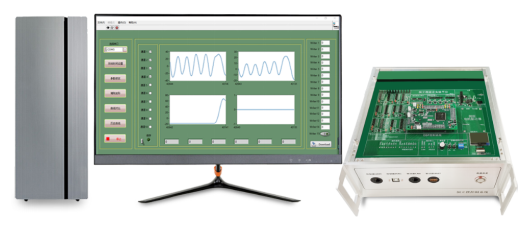
图3 倒立摆控制系统
|
控制器参数 |
|
|
额定电压 |
DC24V |
|
工作温度 |
-10℃~50℃ |
|
工作湿度 |
10%~90%,无凝结 |
|
主处理器 |
TMS320F28335 DSP 32位浮点数处理器 |
|
主处理器时钟 |
150MHz |
|
存储(片内) |
34K x 16bits SARAM;256K x 16 bits Flash |
|
CAN总线 |
2路CAN |
|
AD转换器 |
4通道;12位;输入0~3V;转换时间250ns |
|
DA转换器 |
4通道;16位;输出-10~10V;转换时间10us |
|
其他外设 |
PWM、HALL、SCI、SPI、IIC、GPIO |
|
上位机 |
支持,SCI接口 |
|
驱动器 |
自主研发直线电机驱动器,支持电流,速度,位置及加速度4种控制模式 |
表2 控制系统技术参数
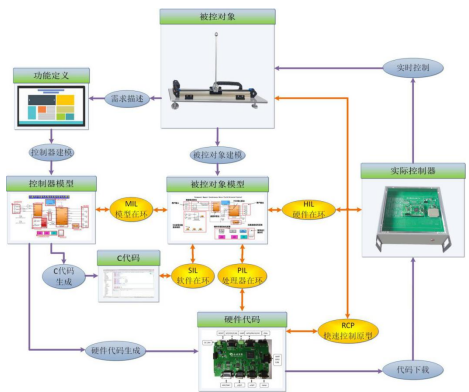
开发概图
(1)直线电机倒立摆Simulink软件仿真图
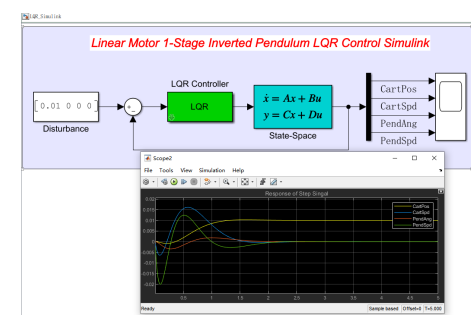
图4直线电机一级倒立摆LQR仿真
(2)上位机软件(参数下发、数据采集显示、数据保存等功能)
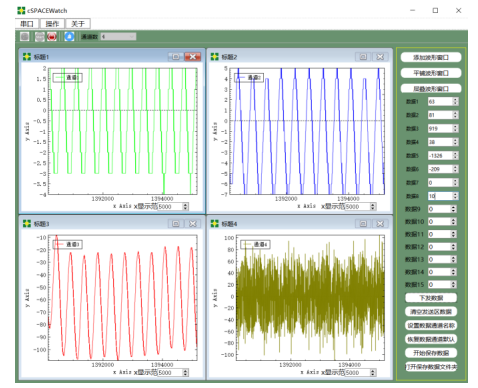
图5上位机监控软件
(3)电机位置正弦跟踪PID控制实验模型
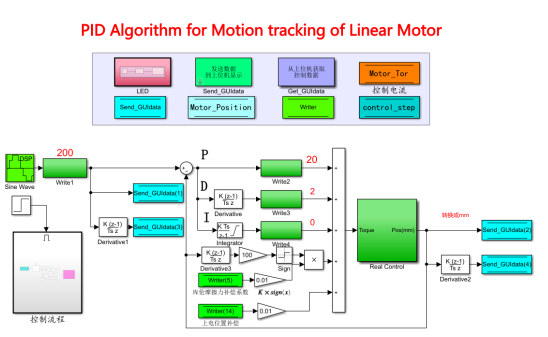
图6直线电机位置正弦跟踪PID控制模型
实验内容一览
列表3所列实验内容为可以在本平台完成的所有实验列表,所有实验程序均在Matlab/Simulink软件中编写,所有程序源代码均开放,用户可以自由修改,实验均配有演示视频
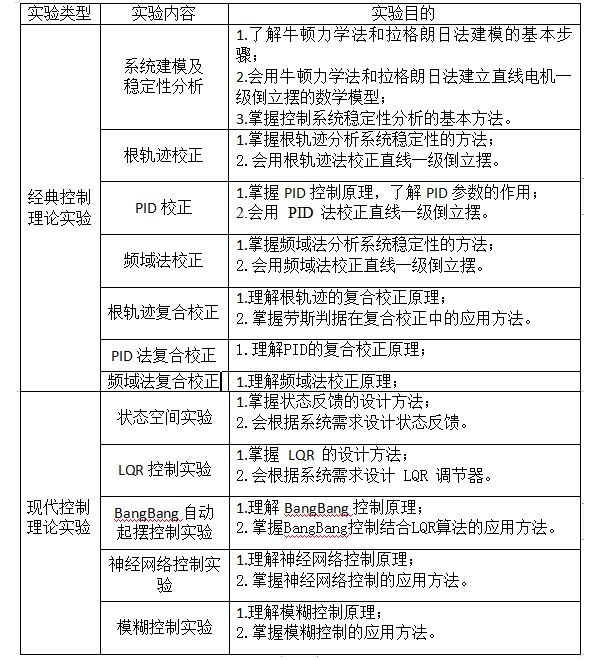
表3 实验项目
本科和研究生教学课程:
1. 机器人建模与仿真
2. 自动控制原理
3. 现代控制工程
4. 机器人操作系统
5. 计算机控制技术
6. 智能控制基础与实践
典型教材推荐:
《自动控制原理》 胡寿松 南航教授
《机械工程控制基础》 华中科大 杨叔子 院士
《现代控制理论》 张嗣瀛 中科院院士
《智能控制》(第三版)北航 刘金琨
《MATLAB建模与仿真》 哈尔滨理工大学 副教授,硕导
支撑科研方向:
1. 旋转电机高精度轨迹跟踪控制算法研究,通过对负载的质量、质心和惯量等参数进行辨识,结合动力学模型和摩擦模型计算出前馈力矩,反馈至控制器,比较分析后获得控制最佳扭矩,从而使倒立摆获得高轨迹精度。
2. 动力学控制:可研究、摩擦力补偿、惯性力和离心力补偿等对控制的影响。
3. 高级自动控制算法:通过驱动器接口开放和控制器开源的特性,可以验证各种高级算法,如鲁棒控制、自适应控制、滑模控制、神经网络控制等高级控制算法,研究倒立摆在变负载、变杆长等复杂情况下的控制算法的性能。
4. 可伸缩摆杆的倒立摆系统控制算法研究,研究倒立摆在稳摆控制时,摆杆长度的变化对控制算法的鲁棒性研究。
应用案例

- 上一篇:摆杆长度可变直线电机倒立摆系统
- 下一篇:夹爪


