

协作机械臂关节研究实验平台
发布日期:2021-04-09 浏览次数:3317
产品概述
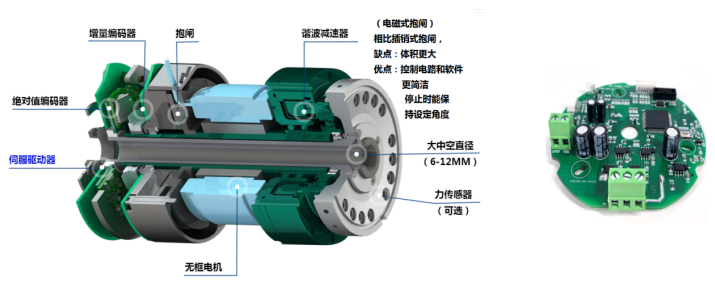
机械臂关节模组是由伺服驱动器、无框力矩电机、谐波减速机、光电编码器(减速机前)、绝对值编码器(减速机后,测量机械臂的输出轴的绝对角度)和继电器抱闸等部件组成,并集成在一个关节中,很适合组装成多轴机械臂,也可以作为其它自动化设备使用。其具有传动效率更高,结构紧凑,能实现更大的连续转矩和瞬间扭矩输出,具有“小身材,大力气”、高精度的特点。
结合公司多年沉淀的丰富的驱动器和嵌入式电控方面的开发经验,机械臂关节模组通过高度集成的机电一体化设计和驱控一体化设计,可以作为工业型、服务型机器人、传统车辆、作业车辆的远程驾驶和自动驾驶改造等系统集成商的优选产品。降低客户对机械选型、设计、组装多个环节的人员和时间投入。
产品特点
1. 小巧符合工业型、服务型机器人结构紧凑、运动灵活、大扭矩的设计特点;
2. 机电一体化设计、驱控一体化设计,最大化减少机器人关节重量;
3. 关节模组输出端重复定位精度0.001º;
4. 断电后自动锁住电机轴,关节模组位置锁定;
5. 输出连续扭矩为10~200N.m。额定转速最高可达40RPM,加速度可达10RPS/S;
6. 常规为48VDC供电,24~60VDC之间供电可选。满足服务型机器人等电池供电的特点;
7. CAN总线通信,支持大部分主流机器人控制器;
8. 定制化开发服务;
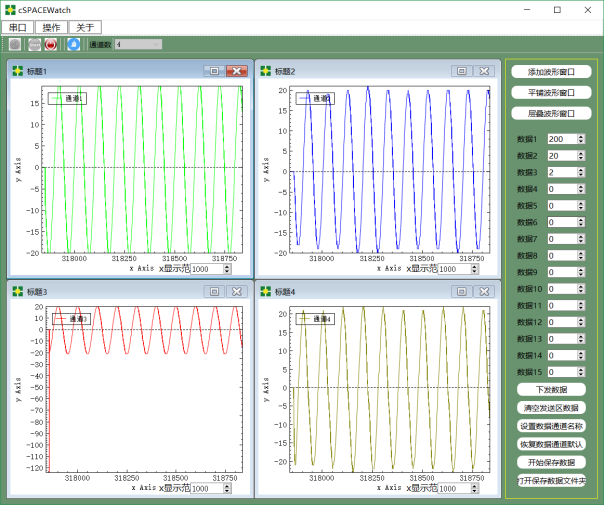
9. 提供功能完善的监控软件,功能包括三环PI参数设置和控制效果观测,电流、速度、位置测试、绝对值编码器显示、电流等参数设置。
相关概图
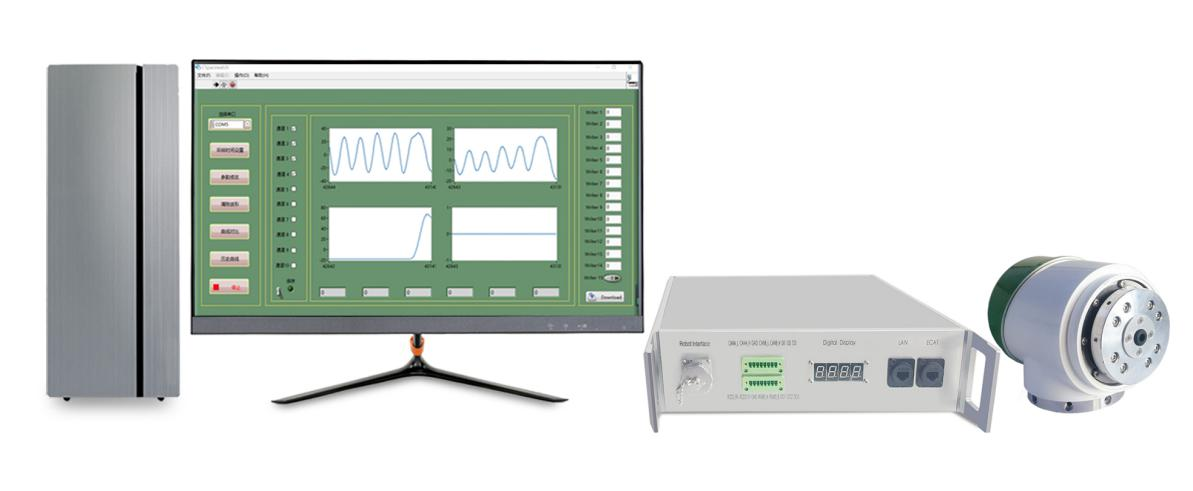
监控界面
在关节模组伺服电机动态跟踪角度,即每个位置控制周期(控制周期为1ms)给定一个新的角度值,实际的角度值和设定的角度值的偏差,在匀加速阶段,为800个脉冲左右(转动一圈有80000,八万个脉冲),匀速阶段为50个脉冲左右,达到国内外先进水平的动态跟踪的伺服性能。
适配教材
《电机学》 《电机拖动与控制》
《机器人学》 《机器人技术基础》
《机器人控制技术》 《现代交流调速技术》
《电力电子技术》 《电机及电力拖动基础》
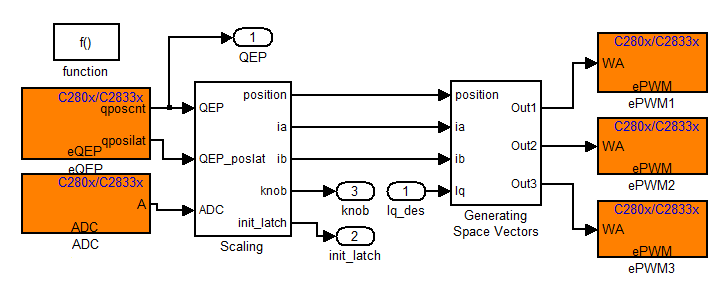
《MATLAB建模与仿真》 《伺服电机与驱动技术》
性能指标
|
参数 |
单位 |
RJS14 |
RJS17 |
RJS20 |
|
关节重量 |
kg |
2 |
2.5 |
3 |
|
关节直径 |
mm |
90 |
90 |
100 |
|
关节高度 |
mm |
100 |
104 |
114 |
|
关节长度 |
mm |
128 |
144 |
144 |
|
转动精度 |
arcmin |
2 |
2 |
1.5 |
|
额定转速 |
rpm |
35 |
30 |
30 |
|
许用负载转矩 |
N*m |
28 |
54 |
82 |
|
平均负载转矩 |
N*m |
11 |
39 |
49 |
|
最大瞬时转矩 |
N*m |
54 |
86 |
147 |
|
增量编码器 |
P/R |
20000 |
20000 |
20000 |
|
绝对值编码器 |
Bit |
17 |
17 |
17 |
|
防护等级 |
/ |
IP54 |
IP54 |
IP54 |
- 上一篇:开源电力电子实验系统
- 下一篇:基于人工智能的智能制造微型产线


