

伺服驱动器产品列表
发布日期:2022-05-06 浏览次数:3253
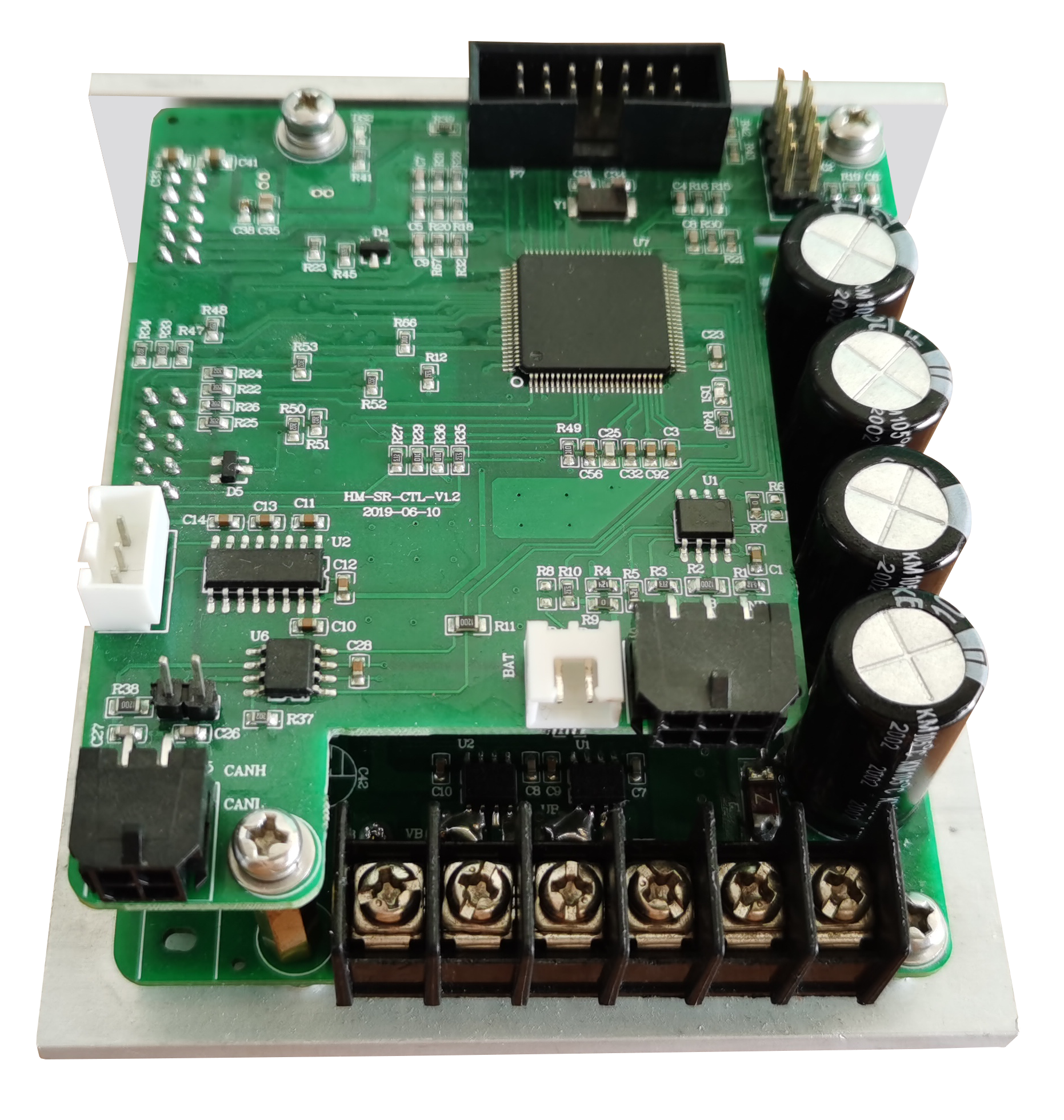
一、ACS306V1

1、采用高性能的TI TMS320F28069 DSP芯片作为主处理器,采用CAN总线通讯。
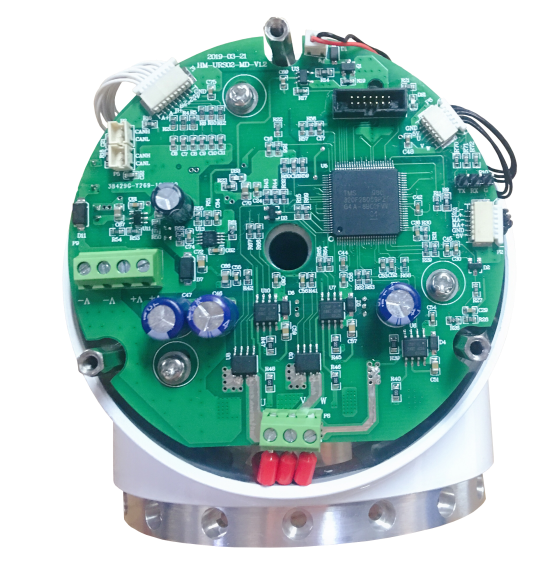
2、一体化设计(一张板卡),可直接安装在机械臂关节模组里面,或其它交流伺服电机上,形成电机、驱动一体化的产品。
3、低速运行平滑,抗干扰能力强,具备欠压、过压、过载、过流、堵转、Hall或编码器异常报警等功能。同时支持霍尔、增量编码器、BISS绝对值编码器三种类型传感器。
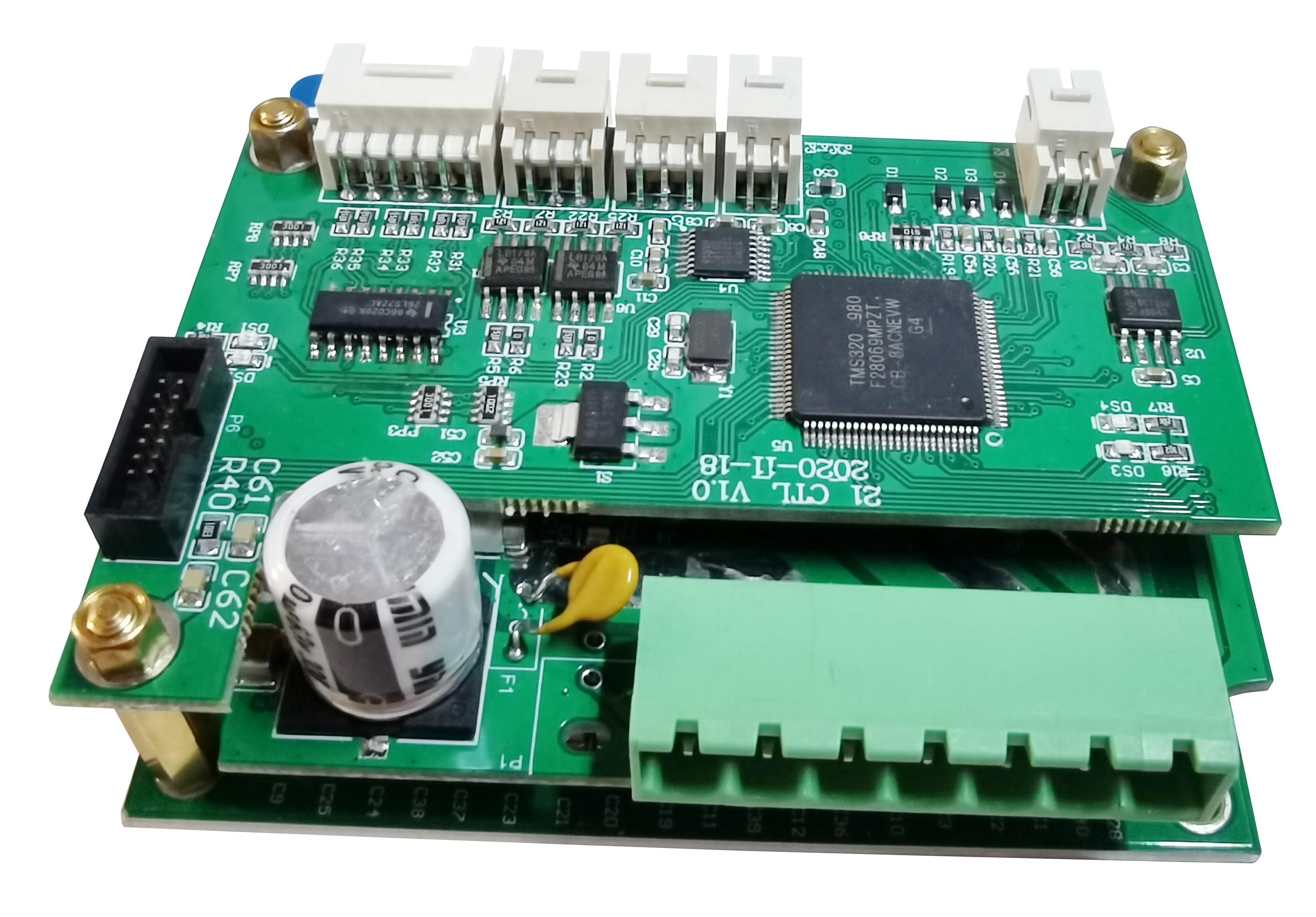
二、ACS306V2

1、相比ACS306V1,体积小巧(直径56mm、厚度20mm)、控制功率板分离设计
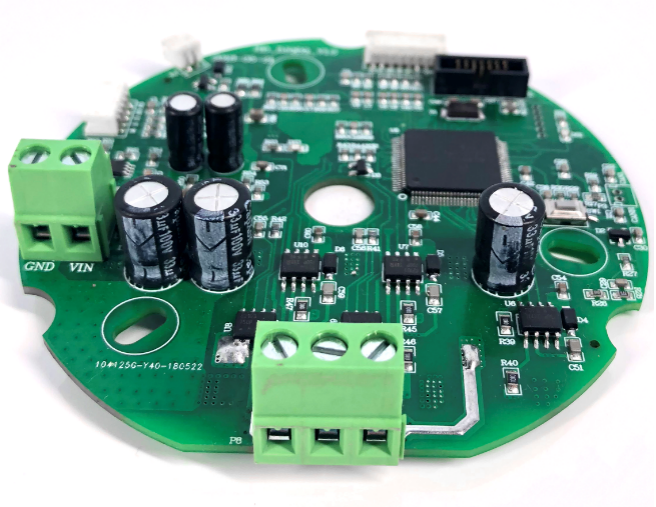
三、ACS506
1、相比ACS306V1,具有28A的峰值电流/15A的持续电流能力。
2、同时支持霍尔、增量编码器、485绝对值编码器三种类型传感器。
四、ACS706
1、相比ACS306V1,铝基板散热工艺,支持大功率持续运行。
2、产品系列可支持从200W到800W功率范围。
1、直线电机
2、低压48V以下的交流伺服电机
3、直流无刷电机
4、力矩电机
5、直流有刷电机和音圈电机需要定制程序
ACS306协作机械臂伺服电机驱动器
概述
ACS306驱动器是为协作机器人一体化关节模组设计的一款高性能、低压、直流供电、全闭环、全数字伺服电机驱动器,采用高性能的TI TMS320F28069 DSP芯片作为主处理器,能实现关节模组用无框力矩电机的电流、速度、位置的精确控制,也可以作为空心杯电机、盘式电机、外骨骼机器人等对体积有要求的伺服驱动器的使用。
驱动器的峰值电流可以达到额定电流的二倍以上,具有高动态性能,大的峰值转矩,平滑的低速性能,强的抗干扰能力,同时具备欠压、过压、过载、过流、堵转、Hall或编码器异常、缺相报警等功能。支持Hall传感器、增量式光电编码器和BISS的编码器,采用CAN、RS232接口实现对驱动器的控制。机械臂关节伺服驱动器性能达到国内外知名品牌伺服驱动器的水平。
机械臂关节伺服驱动器体积小巧,安装简便,调试简单方便。通过驱动器调试软件,用户可以轻松匹配电机和设置伺服驱动器的基本参数,更改电机控制模式、三闭环的参数等,实现对电机的精确控制。
指标参数
|
|
参数 |
内容 |
|
1 |
供电电压 |
20-56VDC (建议采用24V、48V的电池或开关电源供电,48V电池充满电大概在54V,可以正常工作) |
|
2 |
每路输出电流 |
ACS306-1持续电流4A,峰值8A (可定制更大的电流) |
|
ACS306-2持续电流10A,峰值 20A |
||
|
3 |
控制方式 |
串口、CAN总线通讯 支持力矩、速度,位置模式,以及通过CAN总线每隔几ms发送位置信号,进行跟随的位置规划模式(该种功能适用于多轴机械臂等同步控制) |
|
4 |
适配电机 |
低压无框力矩电机或其它交流伺服电机、永磁同步电机 |
|
5 |
总线通讯 |
CAN总线,支持CANopen 协议(可定制升级EtherCAT,可定制开发) |
|
6 |
异常保护 |
具备欠压、过压、过载、过流、堵转、缺相、HALL或编码器异常、超速等 故障报警输出 |
|
7 |
双编码器 |
l 减速机输出端闭环反馈用单圈增量式编码器和霍尔传感器 机械臂关节端用绝对式磁编码器,支持BISS协议,也可以定制支持SSI、SPI、485的绝对值编码器 l |
|
8 |
控制器 |
内置梯形加减速曲线,特殊功能定制化服务,形成驱控一体化的产品 |
|
9 |
电磁抱闸控制 |
48VDC,启动后会降低电流,保持吸住状态,同时防止线圈过热 |
|
10 |
制动电阻 |
需要在电源处外接制动电阻,保护电源和驱动器 |
|
11 |
冷却方式 |
自然冷却或外加散热器 |
|
12 |
防护等级 |
IP54(驱动板带外壳、散热板);IP20(驱动板) |
|
13 |
位置误差控制精度 |
空载:±2Pulse ±15 Pulse (有负载),电机性能好的情况下,可以做到±1Pulse |
|
14 |
速度控制精度 |
±10 rpm@1000RPM(速度闭环模式),在位置模式下,可以实现更好的低速性能,可以一个脉冲一个脉冲地控制转动的角度 |
|
15 |
使用场合 |
尽量避免粉尘、油雾及腐蚀性气体 |
|
16 |
工作温度 |
0℃-40℃ |
|
17 |
保存温度 |
-20℃-+85℃ |
|
18 |
工作湿度 |
20-90%RH |
|
19 |
振动 |
5.9 m/s2 Max |
|
20 |
重量 |
0.2kg |
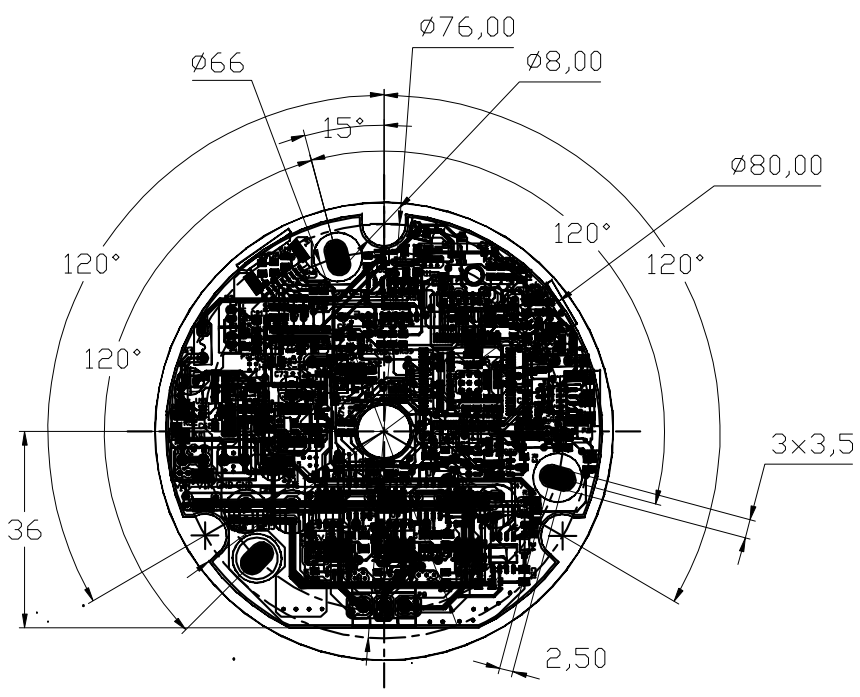
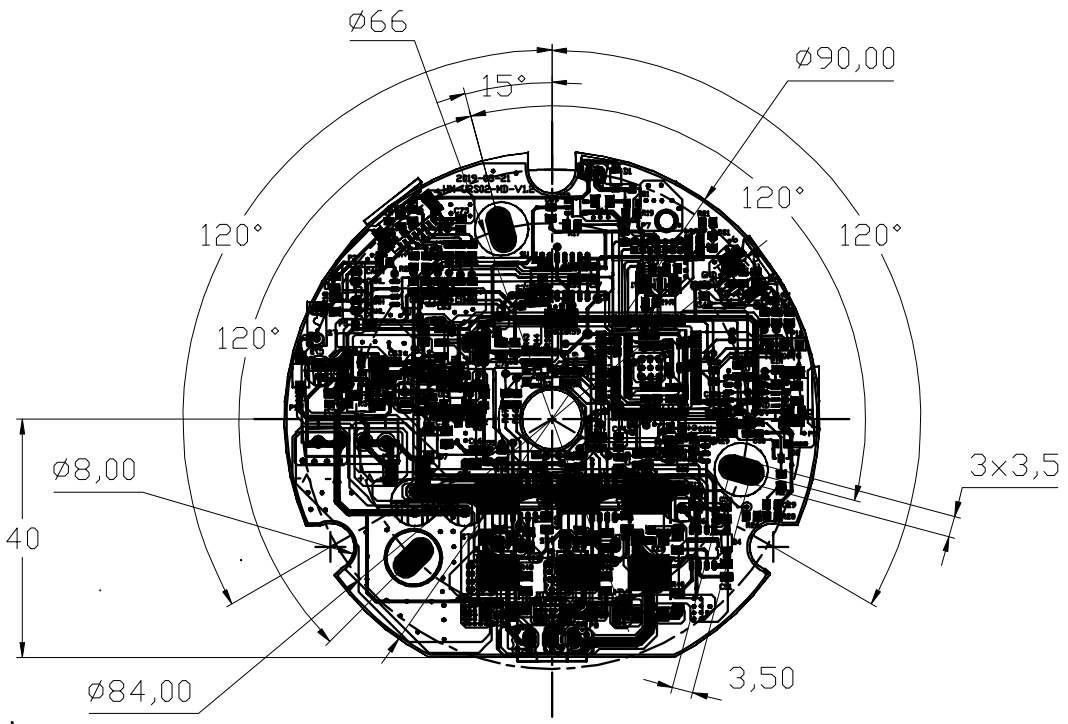
安装尺寸
电机接口(P8) :
|
序号 |
标示 |
名称 |
备注 |
|
1 |
U |
电机动力线U 相 |
黄 |
|
2 |
V |
电机动力线 V 相 |
绿 |
|
3 |
W |
电机动力线 W 相 |
蓝 |
电源接口(P9) :
|
序号 |
标示 |
名称 |
备注 |
|
1 |
VIN |
输入电源+ |
直流 24V-48V |
|
2 |
GND |
输入电源- |
|
仿真器接口(P7) :
|
序号 |
标示 |
名称 |
备注 |
|
1 |
JTAG |
JTAG仿真器接口 |
连接XDS100仿真器 |
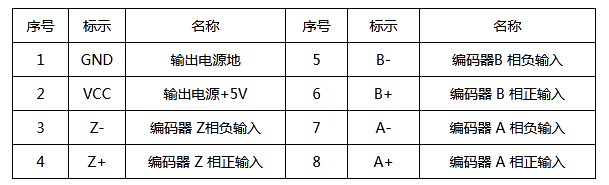
增量式编码器接口(P1):
CAN接口(P3):

绝对式磁编码器接口(P2):

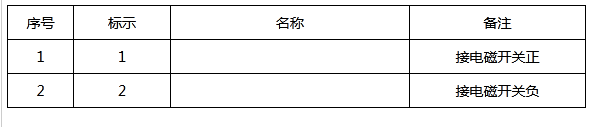
自锁接口(P4):
调试软件
用于设置驱动器的额定和峰值电流、极对数、反馈方式、CAN ID和三闭环的PI等参数,可以对电机进行匹配和测试,尤其重要的功能是能对三环的PI参数进行设置并且实施观测阶跃响应等效果曲线。采用RS232与驱动器进行通讯,也可以通过RS232给驱动器发送控制指令。


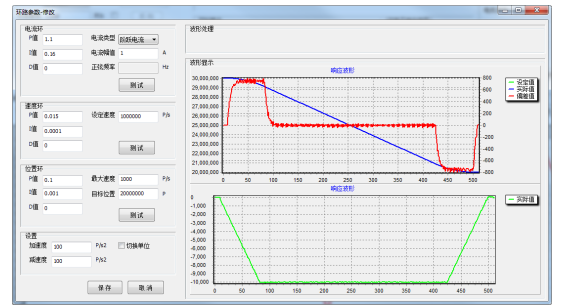
备注:上图是机械臂关节伺服电机动态位置跟踪的速度曲线、位置误差曲线,即每个位置控制周期(控制周期为1ms)给定一个新的角度值,实际的角度值和设定的角度值的偏差,在匀加速阶段,为800个脉冲左右(转动一圈有80000,八万个脉冲),匀速阶段为50个脉冲左右,对应实际的机械臂末端的角度为0.036°和0.00225°左右,达到国外先进水平的动态跟踪的伺服性能。
CAN通讯
驱动器CAN地址
驱动器的CAN地址按照CANOpen中规定,范围为1-127,0为广播地址,使用标准ID。驱动器的地址设置见SC指令。
CAN通信波特率
CAN通信波特率为1000Kbps,不能修改。
指令说明
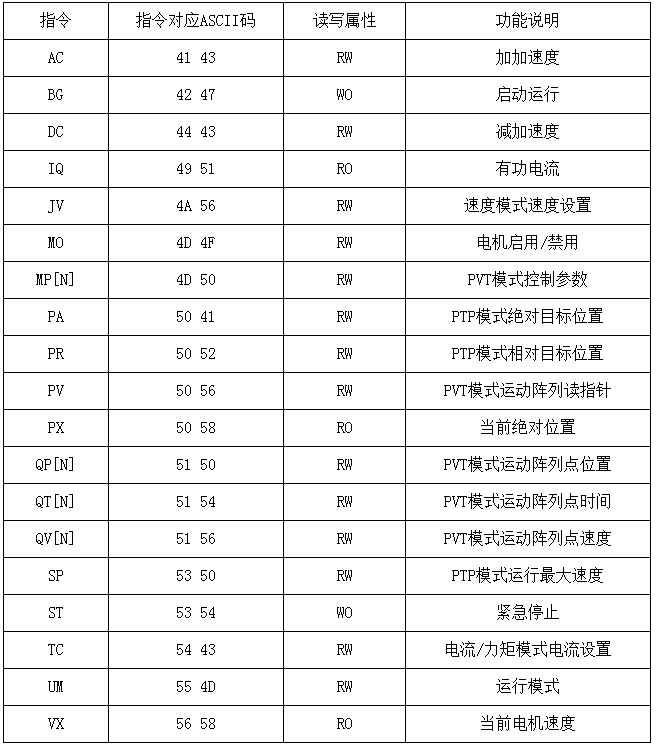
CAN通信指令分为两部分,一部分为兼容以色列Elmo伺服驱动器的CAN通信指令,一部分为根据所需功能自定义指令,但指令格式都相同,和Elmo的CAN通信指令格式一致。
兼容以色列Elmo驱动器的CAN通讯指令列表
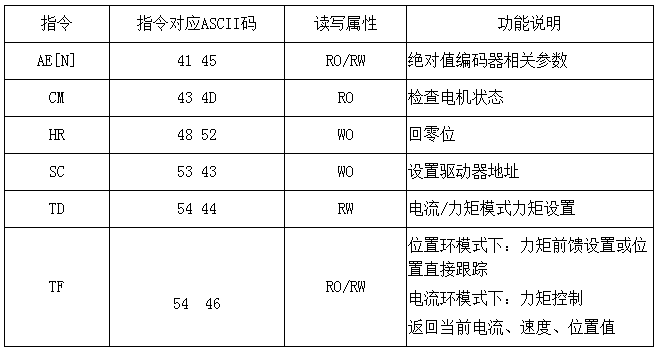
自定义指令
自定义指令列表
- 上一篇:功率级电机对拖性能研究实验平台
- 下一篇:两轮智能车


