

多电机驱动控制综合实验平台(基础版/高级版)
发布日期:2022-05-06 浏览次数:3619
5.1 多电机驱动控制综合实验平台(基础版/高级版)
产品概述
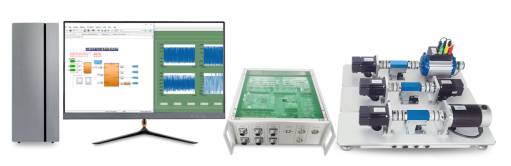
开源多电机驱动控制综合实验平台是基于TMS320F28335 DSP和MATLAB/Simulink开发。由三组电机对拖平台(含高性能扭矩传感器)、电机驱动控制实验箱、上位机和软件包组成。电机包括一台直流有刷电机(汽车电动门窗、座椅、小型自动化设备等广泛应用)、三台永磁同步交流伺服电机(机器人、自动化设备等广泛应用)、一台交流异步电机(特斯拉电动汽车广泛应用)和一台直流无刷电机;硬件原理图全部开源;软件包提供开源的电机驱动控制程序。
系统提供电机驱动控制仿真、信号采集、PWM产生、坐标变换和FOC磁场定向控制、恒压频比调速、电流环、速度环和位置环等内容。可支撑自动化专业、电气工程及其自动化专业、机械设计制造及自动化专业、机器人工程专业、智能科学与技术专业、人工智能工程专业中《电机学》、《电机拖动与控制》、《伺服电机与驱动技术》、《现代永磁同步电机控制原理及MATLAB仿真》等课程的配套实验实践平台,同时可支撑科研工作者开发新型的电机控制模型和算法的科研平台。
产品特点
(1)电机为工业中广泛应用的四种类型(直流有刷电机、直流无刷电机、永磁同步伺服电机和异步电机)。
(2)软硬件底层全部开源,方便二次开发。
(3)基于TI DSP嵌入式和MATLAB/Simulink软件开发,在Simulink中进行模块化编程实现电机的驱动控制,验证各种算法,自动生成代码。
(4)电路模块化设计,可插拔,具有各种编码器接口,信号方便用万用表和示波器观测。
(5)支持PWM和SVPWM、矢量控制等电机驱动控制算法。
(6)支持PID、电流环、速度环、位置环等控制算法。
(7)可通过上位机在线观测、记录、修改参数。
(8)可以实现对拖,施加可变负载,研究高级控制算法在可变负载下的伺服性能。
平台组成
电机驱动控制综合实验平台由实验控制箱和电机对拖平台组成,开发流程如图2所示。
|
实验控制箱 |
电机对拖平台 |
|
由TMS320F28335 DSP作为主处理器。电机驱动控制程序支持在MATLAB/Simulink中编写、自动生成代码、自动编译下载到控制器中运行。实验控制器和电脑上位机之间通过串口连接。
|
电机平台由电机本体、扭矩传感器、光电式增量编码器和联轴器构成。电机包括永磁同步电机、直流有刷电机、直流无刷电机和异步电机;编码器线数为2500PPR,4倍频;扭矩传感器测量电机正反转扭矩信号。
|
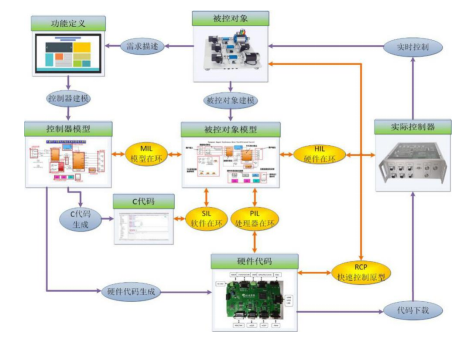
图2 开发流程图
实验平台主要参数如表一所示:
表1 电机综合实验平台技术参数
|
设备名称 |
主要技术参考指标 |
|
|
硬件电路板 |
底板 |
2路增量式编码器调理电路、1路霍尔调理电路、5路开路输出、2路AD输入调理电路(1路正负10V,1路0-5V)、2路按键开关、4路拨码开关、1路蜂鸣器调理电路 |
|
控制板 |
2路CAN通讯电路、5V转3.3V和1.9V电源电路、1路RS232电路、2片PWM输出3.3V转5V芯片、复位按键及3个接线端子 |
|
|
电机功率驱动板 |
6个MOS管及散热片、3个MOS驱动芯片、3个电流采样芯片 |
|
|
电源板 |
24V转+15V电路、+15V转+5V电路、+5V转-5V电路 |
|
|
外部扩展板 |
1路SCI接口、1路SPI接口、1路并口、2路AD及2路GPIO接口 |
|
|
交流伺服电机 |
额定电压 |
36V |
|
额定功率 |
200W |
|
|
额定转速 |
3000RPM |
|
|
增量式编码器 |
2500PPR |
|
|
直流有刷电机 |
额定电压 |
24V |
|
额定功率 |
205W |
|
|
额定转速 |
2800RPM |
|
|
异步电机 |
额定电压 |
24V |
|
功率 |
150W |
|
|
转速 |
1450RPM |
|
|
增量式编码器 |
2500PPR |
|
|
直流无刷电机 |
额定电压 |
24V |
|
额定功率 |
200W |
|
|
额定转速 |
3000RPM |
|
|
扭矩传感器 |
量程 |
0-2Nm |
|
灵敏度 |
1-1.5 mV / V |
|
|
零点输出 |
±2% F.S. |
|
|
制动电阻 |
电阻值 |
5Ω |
|
功率 |
200W |
|
|
其他模块 |
电源模块、USB数据线、USB转串口、扭矩信号放大器 |
|
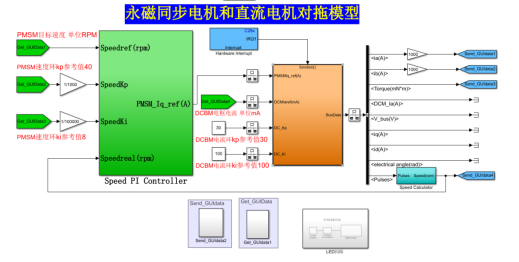
图3 Simulink控制框图
实验内容
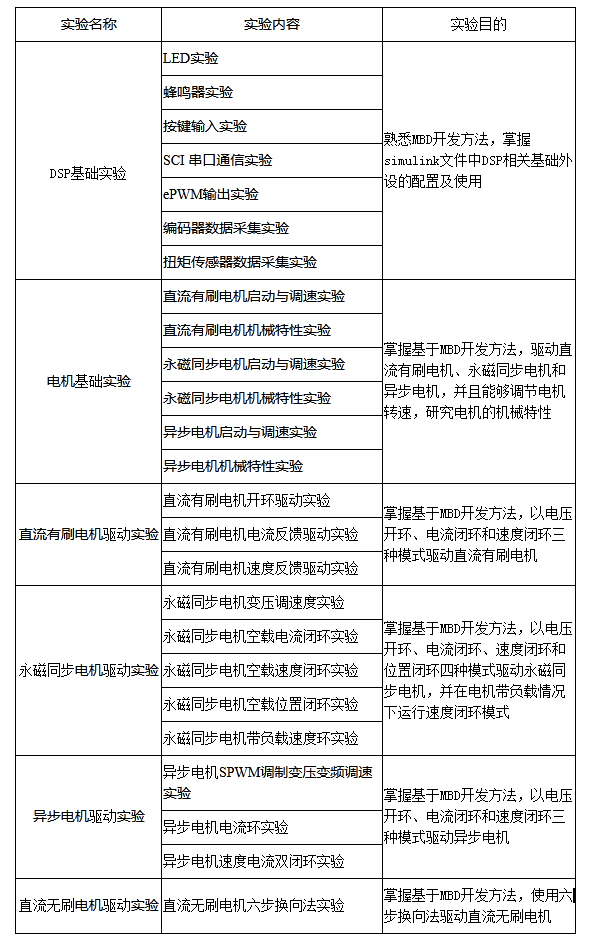
列表2所列实验内容为可以在本平台完成的所有实验列表,所有实验程序均在Matlab/Simulink软件中编写,所有程序源代码均开放,可以自由修改,实验均配有演示视频。
表2 电机平台实验项目
本科和研究生教学课程:
电机学
电机拖动与控制
电力电子技术
MATLAB建模与仿真
伺服电机与驱动技术
电机及电力拖动基础
单片机原理及应用
典型教材推荐:
《电机学》(第七版) [Fitzgerald & Kingsley's Electric Machinery, Seventh Edition][美] Stephen Umans(斯蒂芬·乌曼) 著,刘新正,苏少平,高琳 译
《电机学》(第三版)戈宝军,梁艳萍,温嘉斌 著
《电机及拖动基础》 顾绳谷 编著 普通高等教育电气工程与自动化类“十一五”规划教材
《MATLAB建模与仿真》 哈尔滨理工大学 副教授,硕导
《电力拖动自动控制系统》 运动控制系统(第5版)阮毅,杨影,陈伯时 著
《电机与运动控制系统》(第2版) [Electrical Machinery and Motion Control Systems] 杨耕,罗应立 著
《计算机控制技术(第四版)》顾德英,东北大学,教授,硕导
《现代永磁同步电机控制原理及MATLAB仿真》袁雷 博士
《自动控制原理与设计》(第六版) [Feedback Control of Dynamic Systems, Sixth Edition][美] Gene F. Franklin(吉尼 F. 富兰克林),J.David Powell,Abbas Emami-Naeini 等 著,李中华 等 译
支撑科研方向:
电机参数自动辨识
负载惯量识别
S型曲线速度规划
PI参数自动整定
鲁棒控制
模型预测控制
自适应鲁棒控制
自抗扰控制
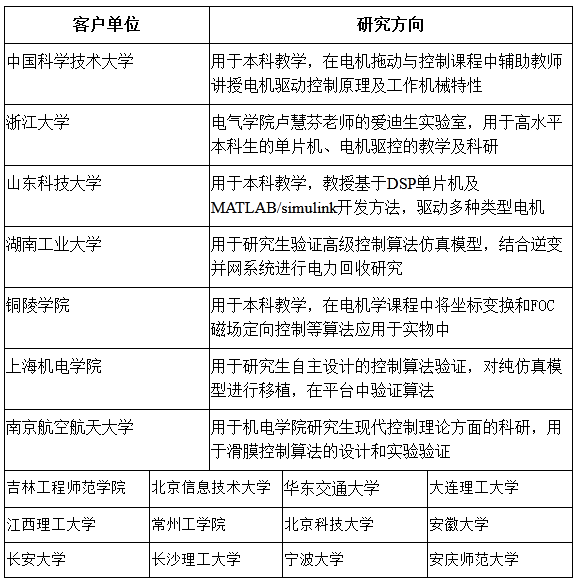
案例应用举例

- 上一篇:无
- 下一篇:轮毂电机综合性能测试分析平台


