

开源四轮差速智能移动机器人
发布日期:2023-09-06 浏览次数:5142
产品概述
本产品采用驱控一体化底盘平台,配合导航系统,外扩设备,构成智能移动 应用实验平台。车体系统由平台控制系统、动力控制系统、电源管理系统组成。 采用 ROS 系统配合开源 SLAM 算法,完成室内建图、定位、自动避障、路径规划; 通过内部的 5G 通信模块、搭配北斗定位系统,可满足室外无人化作业的需求。

产品特点
1. 驱控一体化移动底盘,可以支持深度学习及机器学习应用部署
2. ROS架构,支持C++、Python、Matlab/Simulink联合开发
3. 支持Matlab/Simulink与GAZEBO,ROS与GAZEBO等多种仿真模式
4. 采用大动力、四驱、高悬架结构,有效负载大,适应室外多地形环境
5. 可以自由搭配多种类的外设,并有多种外设型号可选
6. 通过认证的大功率工业驱动器和电机,运行平稳,有效载荷大
7. 实验案例内容丰富详细,包含大篇幅的技术及知识点介绍
8. 资料完全开放,支持二次开发,提供二次开发技术支撑
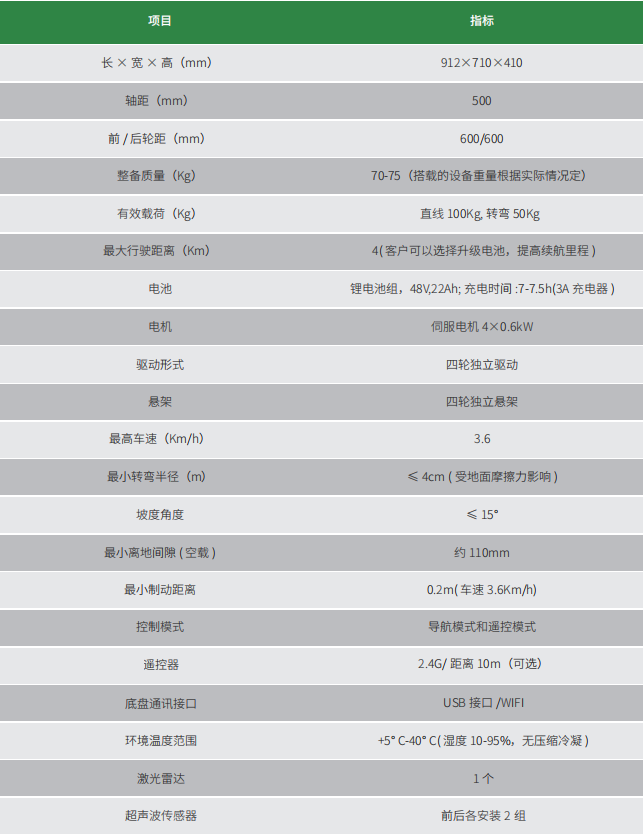
参数指标
- 上一篇:四轮驱动四轮转向移动机器人
- 下一篇:多传感器融合开源移动机器人


