轻便型移动作业智能机器人
发布日期:2023-09-06 浏览次数:2316
产品概述
该平台是适用于机器人移动作业、机器人单体和多智能体控制,集环境感知、动态决策与规划、行为控制与执行、数据分析以及智能控制等多功能于一体的高性能教科研平台。其由机器人控制系统、机电控制系统、多传感器模块、移动底盘、轻型多自由度机械臂等组成。其中,机器人控制系统硬件基于英伟达控制器开发、软件基于ROS系统及Matlab/Simulink开发;机电控制系统硬件基于STM32开发、软件基于C语言开发;多传感器模块硬件含有超声波传感器、距传感器、红外传感器、2D激光雷达、AI人脸识别模块、AI语音模块,软件含有多传感器信息融合算法包、开源高精度导航定位算法包(精度3cm);移动底盘采用开放式分层结构设计,留有二次开发接口供加装其它类型传感器(如温湿度传感器、九轴姿态传感器、3D激光雷达、5G通信系统);轻型多自由度机械臂为6自由度高性能协作机械臂,末端安装吸盘及深度相机可进行机械臂抓取。
该平台开发方式简单、设计精巧,提供机器人运动学算法包、机器视觉算法包、多传感器信息融合算法包、开源高精度导航定位算法包、平台应用案例算法包及教科研资源,可以作为自动化专业、机器人工程专业、人工智能专业、智能科学与技术专业《机器人学》、《机器人操作系统》、《机器人传感器技术》、《移动机器人》、《机器人导航与控制》等课程的实践教学平台,也可以作为相关专业师生做机器人运动学、定位与导航、多传感信息融合、多智能体集群控制、视觉与图像处理及人工智能方面科研及产业应用平台。

产品特点
(1)支撑机器人建模仿真、机器人操作系统、传感器、机器人学、机器人控制等教学实验。
(2)伺服性能优良,运动定位精度高,车体采用模块化设计,易于安装,人机交互友好,使用便捷。
(3)控制系统采用MATLAB/Simulink软件进行编程,用户可以更好更便捷地研究控制算法,并可支撑更高级的控制算法验证。
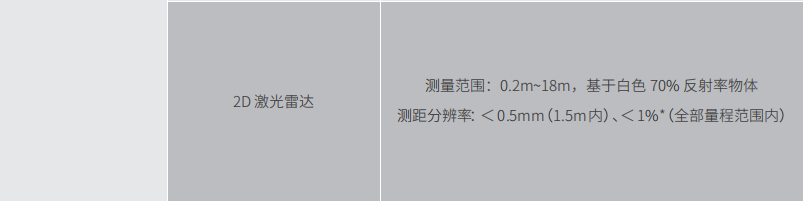
(4)提供多传感器感知周围环境,2D激光、深度视觉、超声波等,更接近产品落地方案算法研究。
(6)采用高性能计算机作为主控系统,可实现机械臂、底盘、视觉、导航、吸盘的控制,满足大量数据的处理运算需求。
(7)提供丰富学习与教学资源,方便快速入门。
支撑科研方向
(1)目标分类与目标检测
(2)机器人视觉伺服设计、避障与路径规划
(3)激光建图定位、导航、路径规划、避障检测
(4)姿态解算、滤波算法与惯导融合
(5)远程控制与信息传输、信息融合
(6)深度学习
(7)多智能体集群控制
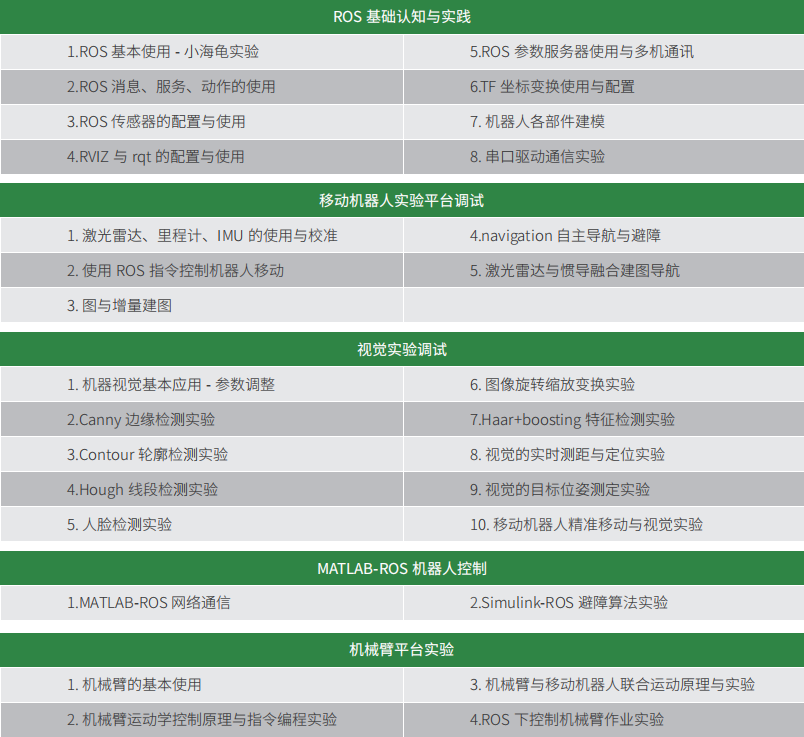
支持实验内容
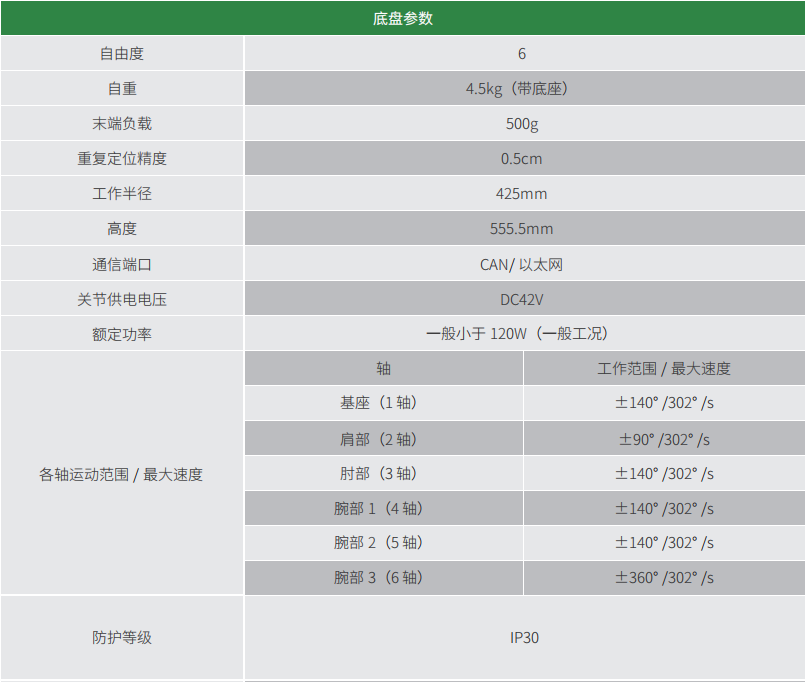
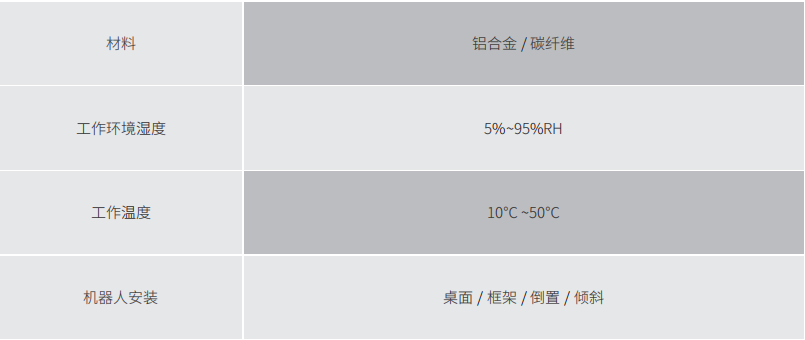
性能参数