

开源双臂协作机器人
发布日期:2023-09-11 浏览次数:5681
产品概述
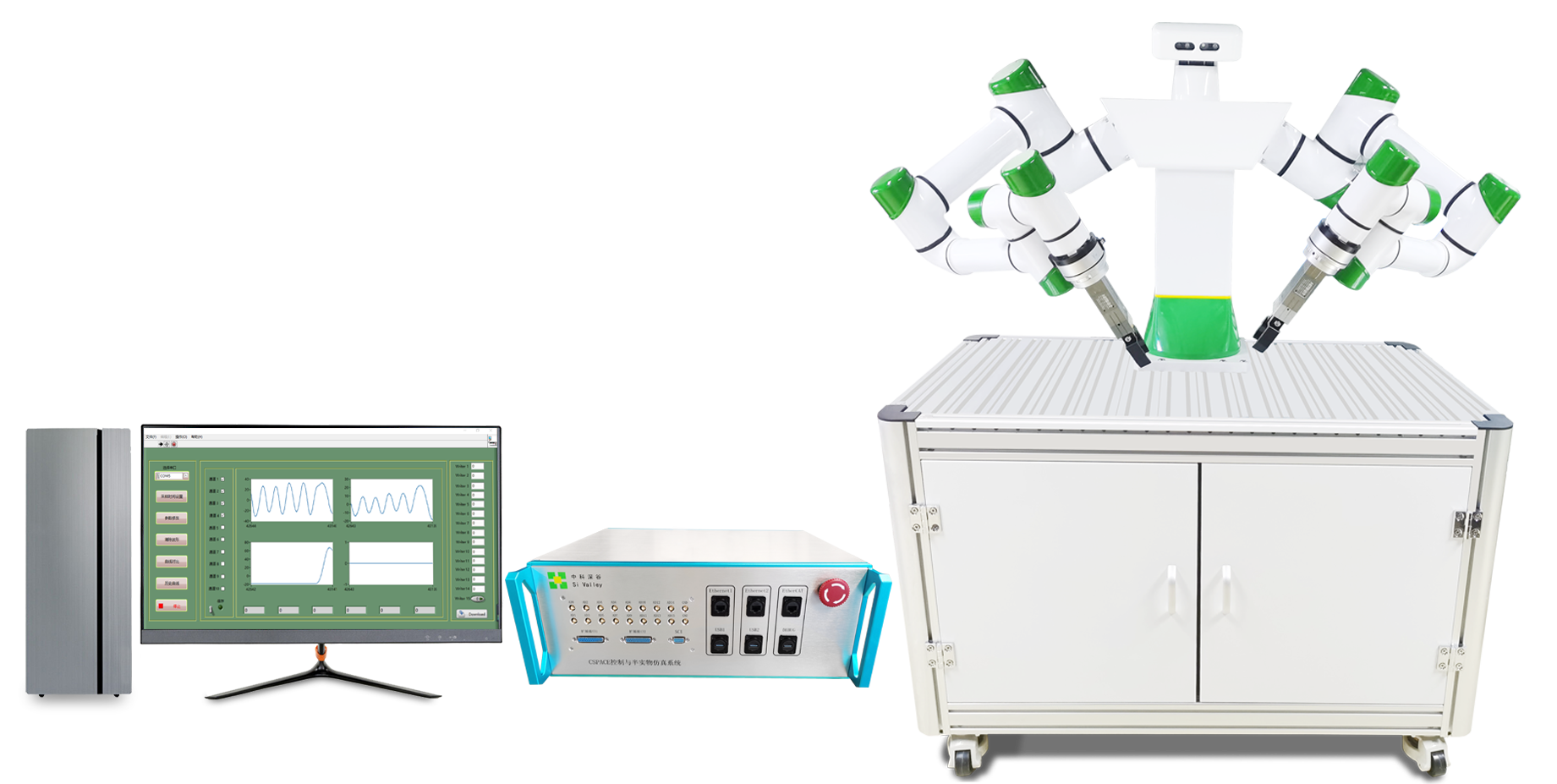
开源协作机器人是基于CSPACE控制系统和MATLAB/Simulink开发的教科研平台。其由机械臂本体(多个(3、6、7个)机械臂关节及其连杆和底座)、控制系统、上位机和稳压电源组成。每个机械臂关节由谐波减速机、力矩电机、高精度绝对值编码器、高精度增量式光电编码器和伺服驱动器组成。该机械臂系统使用全自主研发的关节驱动器及运动控制器,为教学和科研提供优越的开放性支撑。
该系统控制算法源代码开源,提供丰富的运动学、动力学控制实验以及伺服电机控制实验案例,如运动学实验、单双关节PID动力学算法实验、单关节自适应控制算法实验以及单双关节零力拖动实验等。
产品特点
1. 算法库强大:自主研发控制系统,集机器视觉、智能力控、运动学、动力学、机器学习等算法于一体。
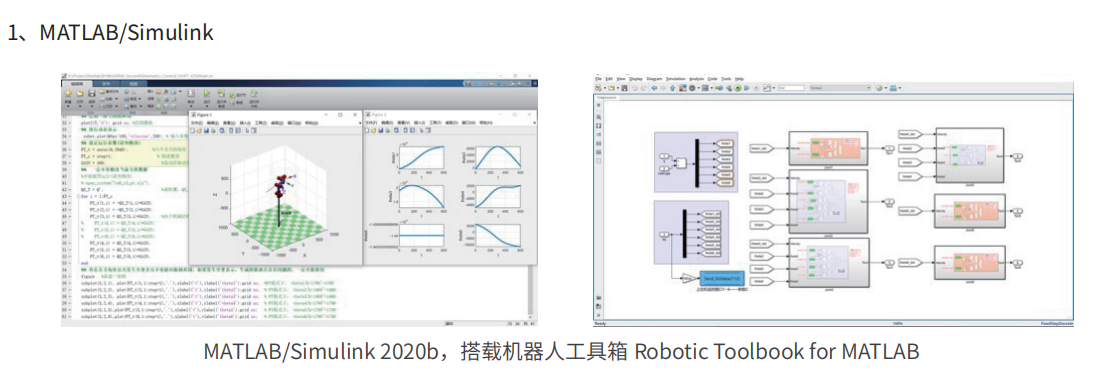
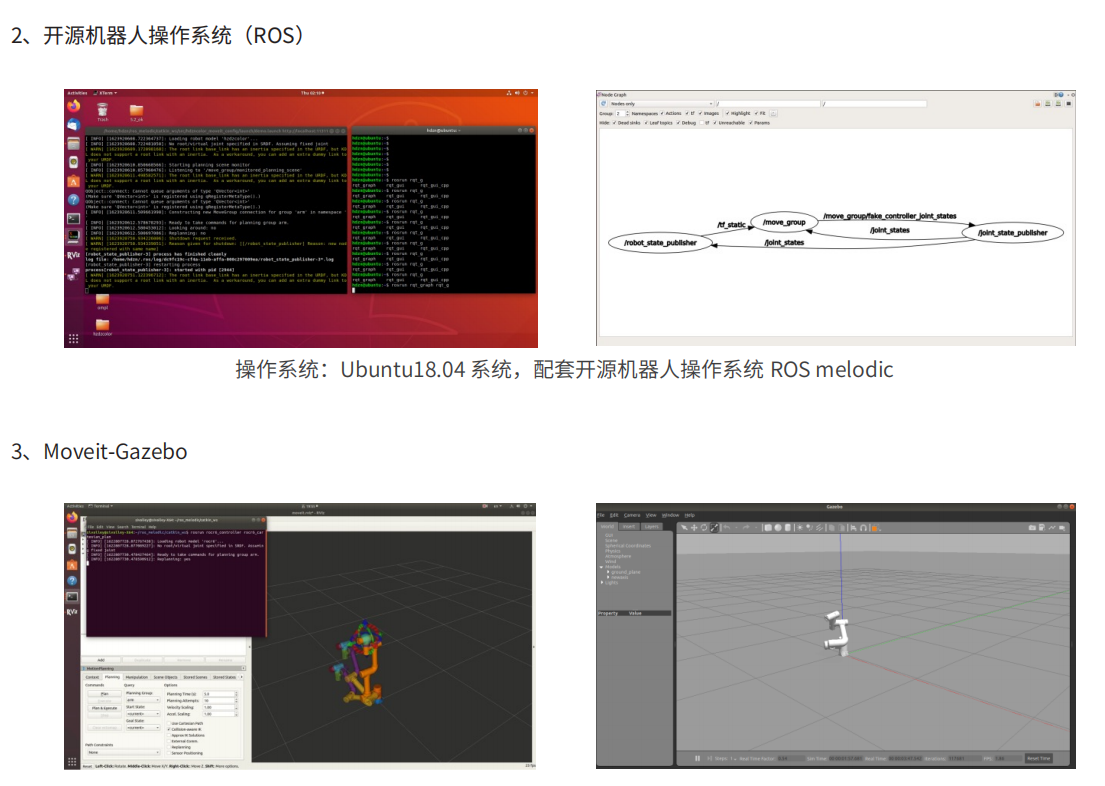
2. 采用 ROS 控制系统对视觉、夹爪、机械臂、力传感器进行联调控制。
3. 控制系统全开源,自主研发伺服驱动器,提供正逆运动学、笛卡尔空间和关节空间等运动学、动力学等算法实验案例。
4. 提供 3D 视觉开源算法、机械臂和视觉系统的手眼标定、视觉抓取、双臂视觉标定和作业等实验。
5. 系统开放性高,定制能力强,软硬件接口丰富,支持 EtherCAT、Ethernet 等多种通讯方式,控制和开发方法灵活。
6. 应用场景丰富:提供单臂操作,双臂协同,柔性控制,力控装配,智能示教等场景实验。
7. 支持多传感器融合,智能语音控制、智能图像识别控制、远程控制等应用扩展。
应用专业
机器人专业、机械电子专业、机械工程专业、自动化专业、智能制造专业、人工智能专业
支持课程
机器人学、机器人建模与仿真、自动控制原理、机器人操作系统计算机控制技术
支撑科研
1、机械臂高精度轨迹跟踪控制算法研究
2、动力学参数辨识
3、 碰撞检测保护
4、拖动示教
5、力位混合控制
6、柔顺控制
7、高级自动控制算法
8、路径规划和轨迹规划
9、柔性机械臂运动学参数标定与精度补偿技术研究
10、集成力传感器、视觉传感器、5G等,进行“机器人+”应用
11、基于深度学习的机械臂高级运动控制与应用
12、双臂协作机器人协调运动规划研究
13、双臂协作机器人智能控制与协作任务规划
14、双臂协作机器人高动态精度设计及工作空间分析
15、双臂协作机器人高级动力学协同控制策略
16、基于机器视觉和深度学习的双臂协作技术研究
17、多机械臂多任务复杂空间环境中协同控制策略
配套系统及软件支持

教学案例
实验室建设
1.实验室功能
该实验室可以作为自动化专业、机器人工程专业的《机器人学》、《机器人系统设计与开发》、《机器人建模与仿真》、《机器人技术基础》、《机器人动力学与控制》等课程的相关实验平台,能够完成如机械臂运动控制正逆解实验、机械臂笛卡尔空间轨迹规划实验、机械臂关节空间轨迹规划实验、单双关节PID动力学算法实验、单关节自适应控制算法实验以及单双关节零力拖动实验、碰撞保护实验、参数辨识实验等实验内容。
2.实验室建设效果图

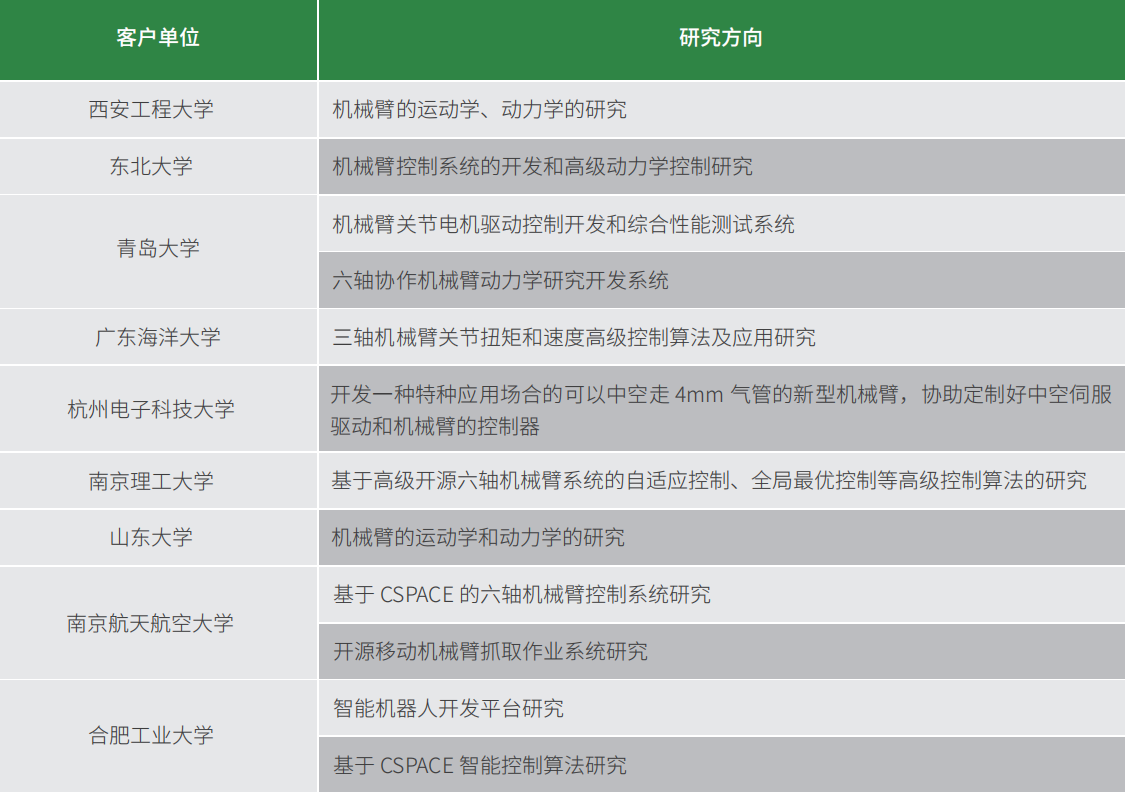
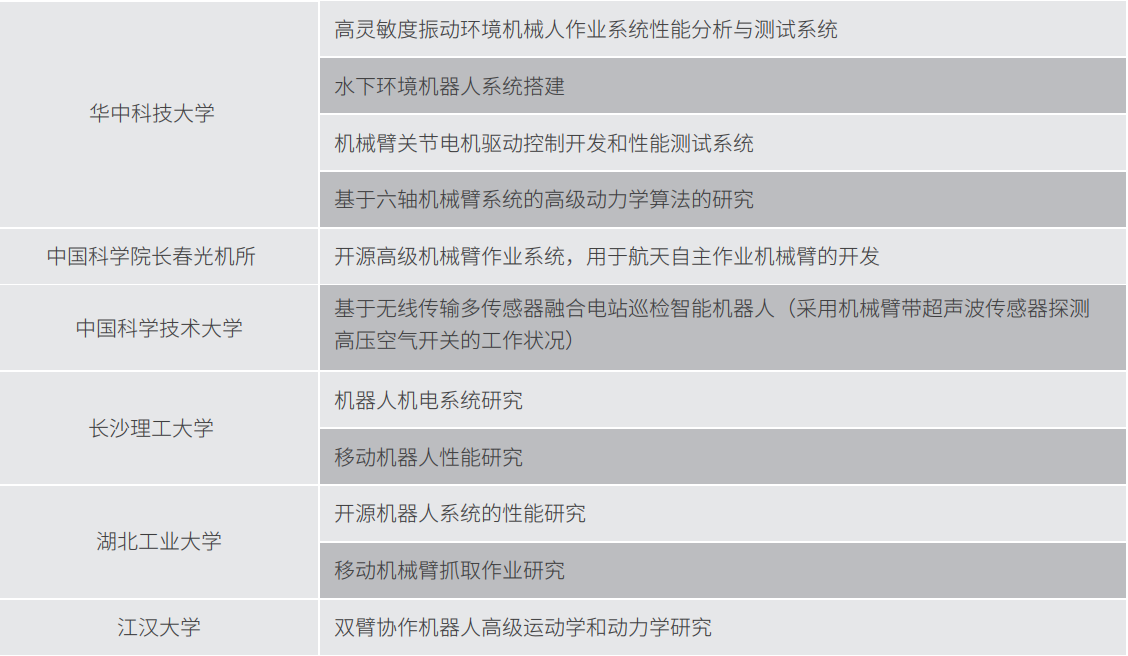
3.实验室建设案例
目前已有中国科学技术大学、西安工程大学、东北大学、青岛大学、广东海洋大学、杭州电子科技大学、南京理工大学、山东大学、南京航天航空大学、合肥工业大学、华中科技大学、中国科学院长春光机所、长沙理工大学、湖北工业大学等多所高校使用上述设备建立机器人技术实验室。

- 上一篇:无
- 下一篇:开源七轴协作机器人


