

自平衡无人驾驶智能电动车
发布日期:2023-09-16 浏览次数:4431
背景介绍
两轮电动车具备环保、性价比高、使用便捷、不担心堵车等特点,已在快递、外卖、接送小孩、上下班等短距离通勤场景广泛使用,近几年每年销量突破 4000 万辆。两轮电动车在雨天、路滑、路面有石头等障碍的情况下容易失去平衡而摔倒,给骑乘者带来人身安全问题。据不完全统计每年电动自行车的交通事故有数百万起,提升电动车的安全性势在必行。
基于两轮电动车的这种局限性,有必要开发一款智能自平衡电动车,通过高速旋转的飞轮产生的平衡力实现电动车在遇到特殊情况下维持车身自身平衡,提升电动车安全性。同时,基于人工智能、4G/5G、机器视觉、3D Slam 建图定位导航避障、自动驾驶等先进技术,智能自平衡电动车也衍生出自动跟随、自主避障、语音控制、远程控制、定点停车、一键招车、自动驾驶、辅助驾驶等功能,在科普、娱乐、辅助健身、郊游、能自动调度的共享电动车、物流配送等有广阔的应用前景,对于教学科研用户,以上技术均可以开源,支撑两轮自平衡智能车和无人驾驶的研究。
产品概述
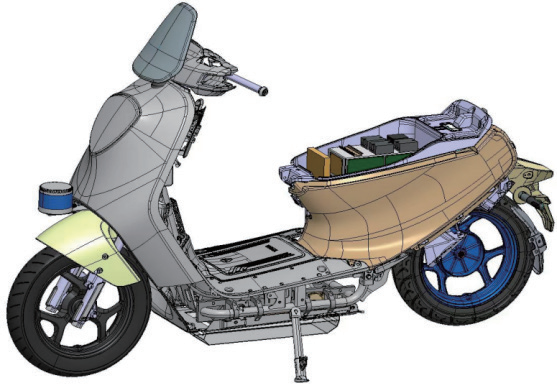
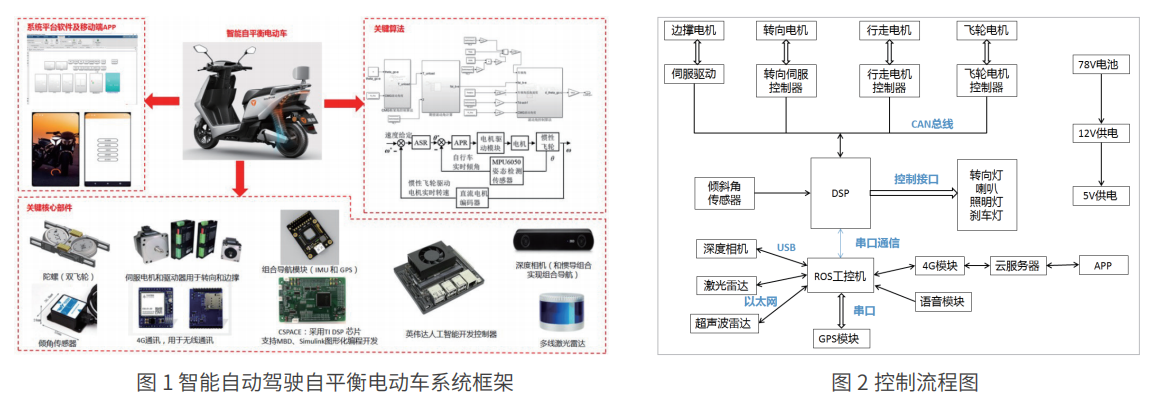
智能自平衡电动车是基于TMS320F28335 DSP、英伟达NVIDIA TX2主控板和MATLAB/Simulink、ROS开发,该产品由电动车车体、自平衡系统、传感器系统、视觉和导航系统、控制系统、电源管理系统、手机APP上位机等构成。视觉和导航系统主要包括超声波传感器、激光雷达、深度相机,自平衡系统主要是由高速旋转的飞轮和电机、倾角传感器、飞轮摆角伺服电机、主控板等组成。可以实现的功能有自平衡、远程遥控、语音控制、自动跟随、定点停车、一键招车等。平台支持MATLAB与ROS联合开发,为教学和科研提供优越的开放性支撑,可进行深度学习、自动驾驶、机器人移动作业等人工智能的应用研究,也是开发自平衡自动行驶智能电动车及其衍生产品专业的平台。
产品特点
(1)提供创新型的两轮自平衡、自动行驶的电动车/移动机器人方案,具有载重高、运动灵活、爬坡和越野能力强、适应路面广、自动驾驶和自主骑行相结合等特点,在物流配送、巡逻侦察、载人交通工具、共享电动车等具有广阔应用前景;
(2)车体飞轮平衡控制、视觉识别、自主导航、自动跟随等均采用自主开源化的设计,可自由进行单独或融合算法研究;
(3)采用MATLAB和ROS联合进行算法开发研究,适用范围广;
(4)提供丰富的 Demo 算法及实验案例,供用户在更深层次上的学习和研究;
(5)平台控制部分可完全开源,提供开发接口,可进行集成应用,提供全方位的技术支持,能很好支撑工业应用。
产品核心功能
自平衡控制
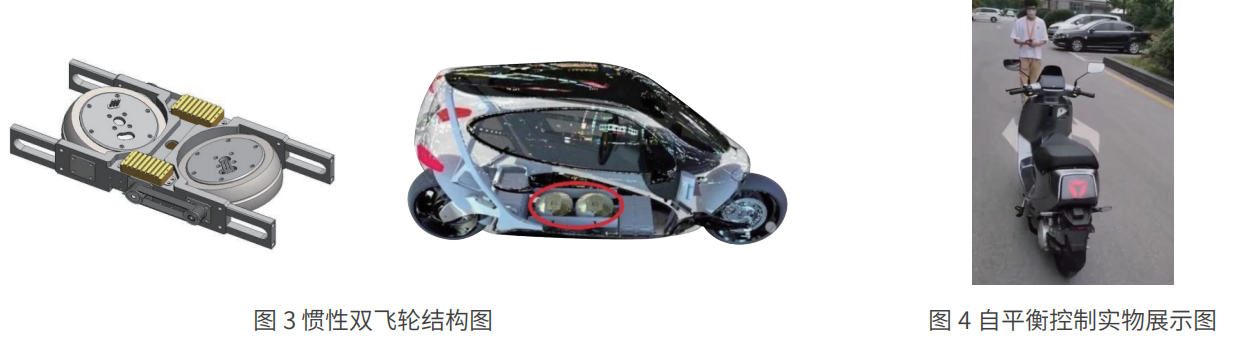
采用高速旋转的双惯性飞轮,并进行飞轮的倾斜角控制,通过陀螺效应产生的平衡力实现平衡控制。采用倾角传感器检测电动车的倾斜角,经过我司专利算法(包括双回路PID控制算法)处理后,输出控制两个惯性飞轮转速和倾角控制的电信号,产生惯性平衡力矩,控制电动车收敛于直立的平衡状态,从而实现电动车的平衡控制。
自动跟随
支持视觉跟随和UWB定位两种方式实现自动跟随功能。
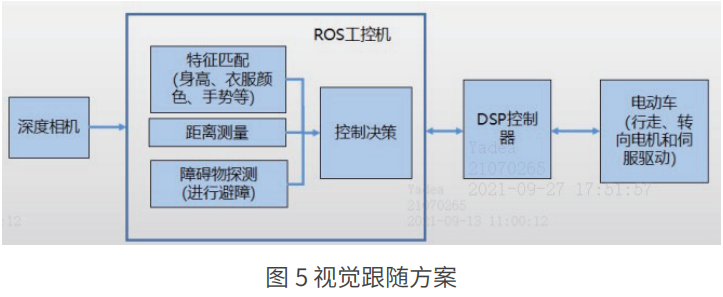
视觉跟随:通过深度相机识别跟随目标,并计算目标的三维空间坐标,运用算法规划行驶路径,输出角度与速度指令,时刻保持车辆与跟随目标间的位置。并可提供FairMOT和yoloV5 +deepsort的人群特定人员视觉识别跟随算法案例。
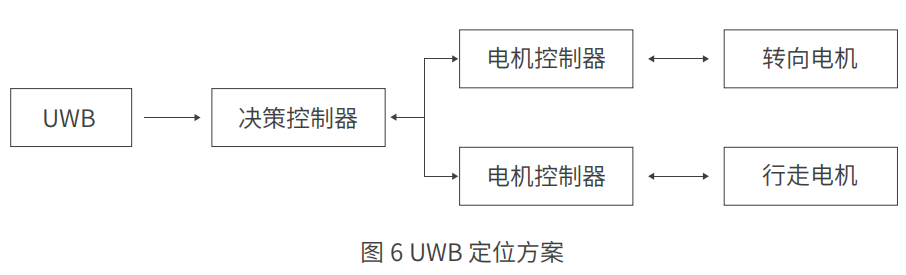
UWB定位:通过在车辆上安装UWB信号接收标签,被跟随目标携带UWB基站,通过信号到达角度(AOA)测量、到达时间定位(TOA)、到达时间差定位(TDOA)测量,计算车辆与被跟随目标之间的位置关系,导航系统规划路径进行跟踪,并利用摄像机辅助进行避障。
自动避障
通过激光雷达、超声波传感器、深度相机联合实现自动避障功能,当遇到障碍物时,通过传感器感知障碍物的范围和距离,利用路径规划算法规划可行驶路径。通过深度相机可辅助识别激光雷达的检测盲点,进而控制车辆行驶,躲避障碍物。通过超声波雷达模块,辅助探测道路上深度相机和激光雷达检测不到的区域或物体,如道路上一定高度的台阶等。

语音控制
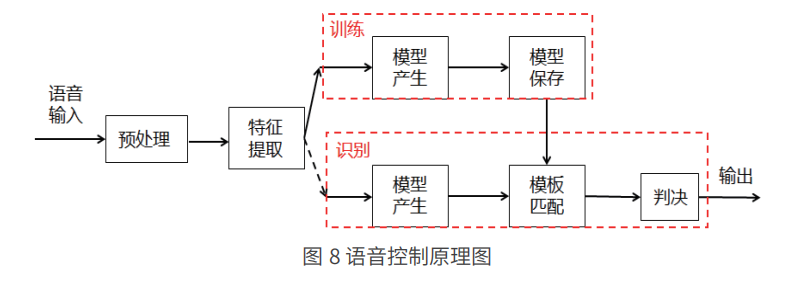
语音控制功能在手机APP软件中实现,APP识别语音控制指令后,利用4G通信进行语音指令信号传输,伺服驱动器接收到信号后执行相应指令,从而实现语音控制电动车各项行驶动作的功能。语音识别指令目前支持 “前进”、“后退”、“左转”、“右转”、“停止”五条指令。
远程控制
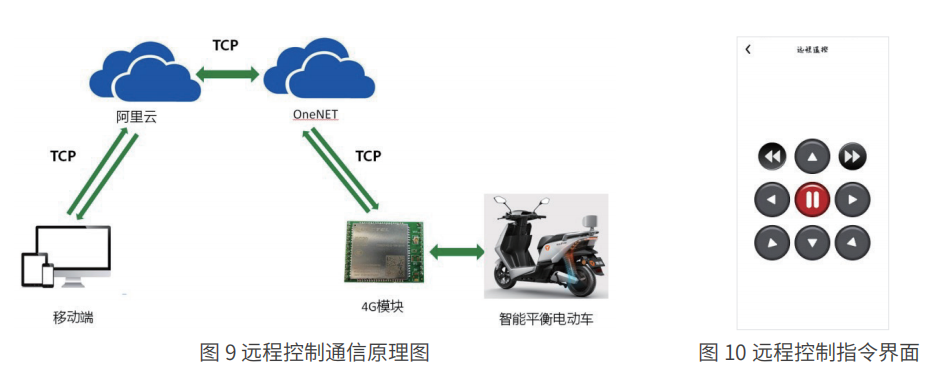
通过手机APP将控制指令采用4G通信上传至云端,再通过4G通信传输至电动车,整车控制器接收到控制信号后执行相应指令,从而实现远程控制功能。远程控制指令目前支持前进、后退、左转、右转、左后、右后、停止、加速、减速等指令。
一键招车/定点停车
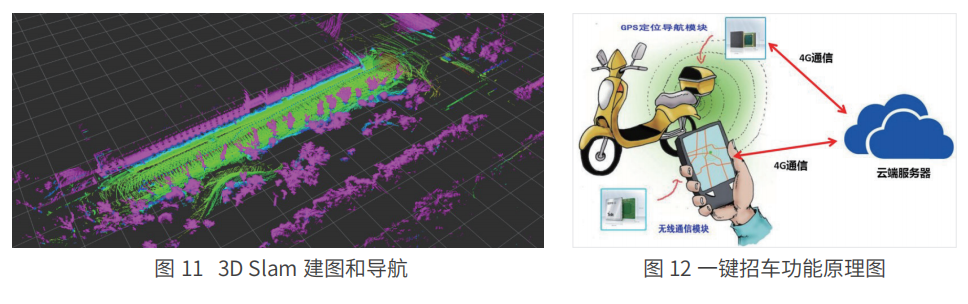
综合利用室外GPS、激光雷达、惯导、深度相机技术,采用3D Slam建好地图,手机APP上可指定停车位置,电动车会自动到达该指定位置,进行存放或充电。当有用户用车时,通过手机 APP 可实现一键召车,电动车可根据事先规划的路径能自动行驶到用户面前,实现车找人。电动车行驶过程中如遇障碍物会进行自动避障。

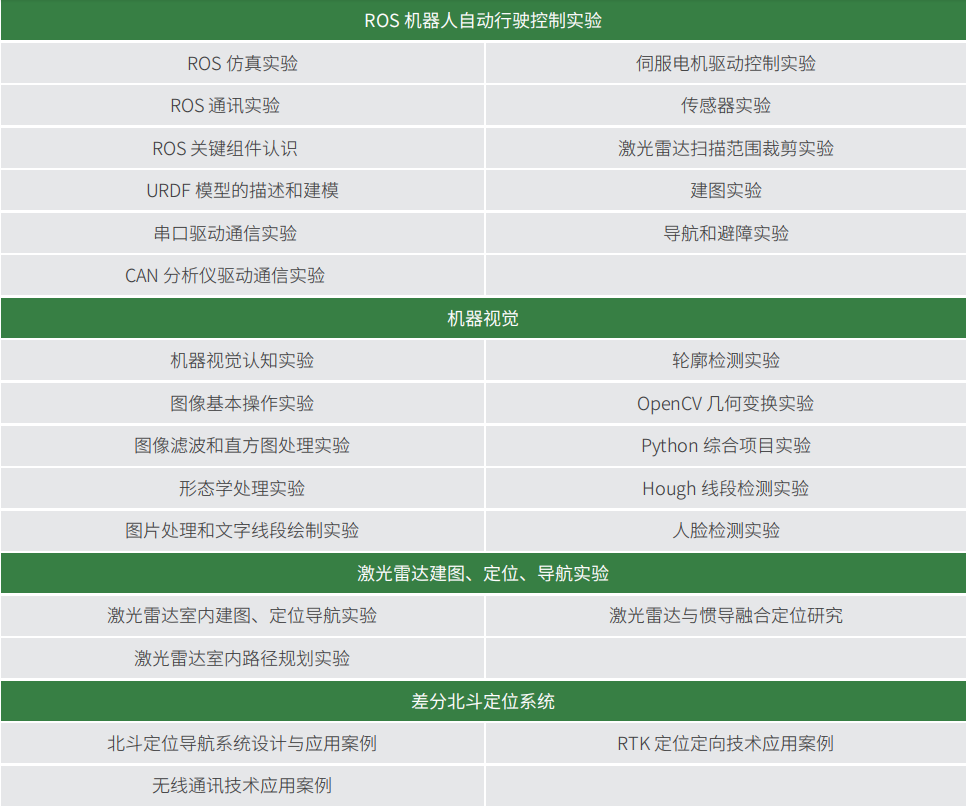
实验内容

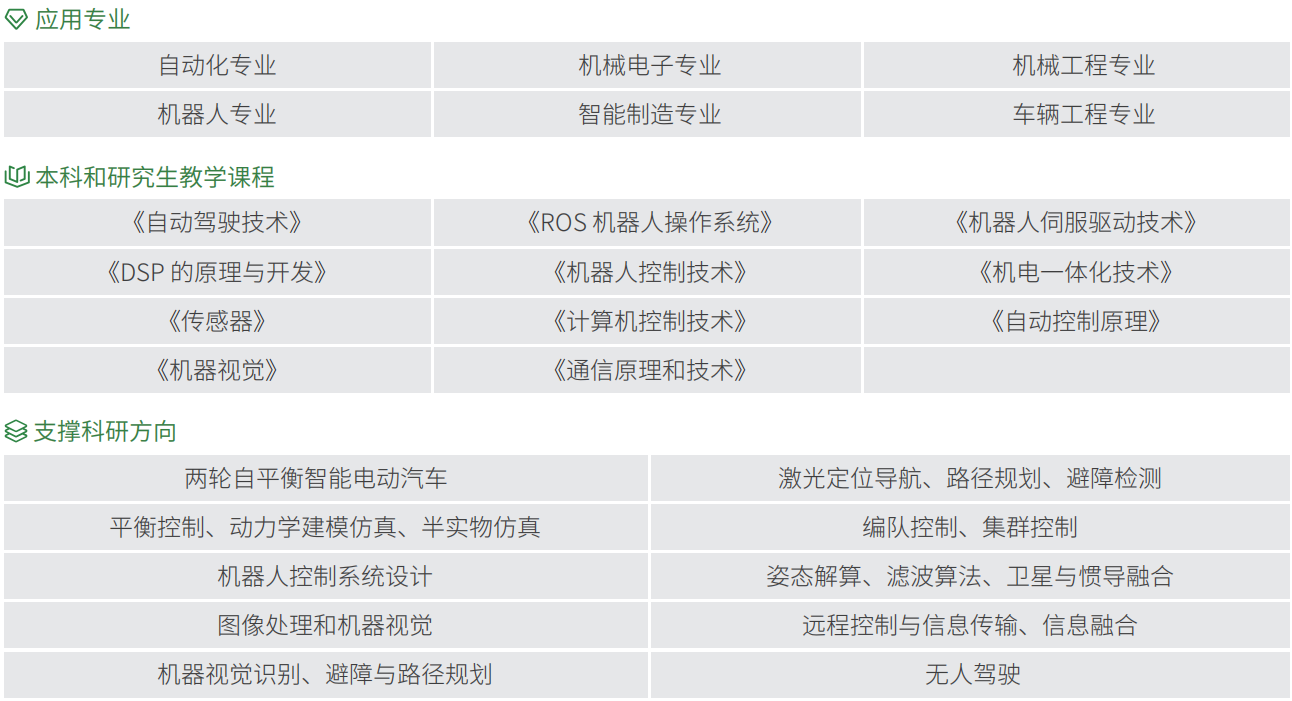
支撑的教学科研
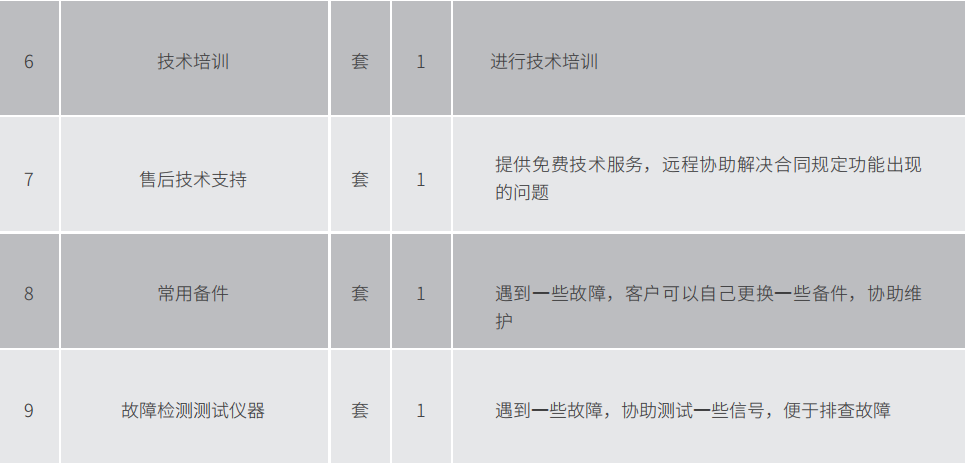
产品交付清单

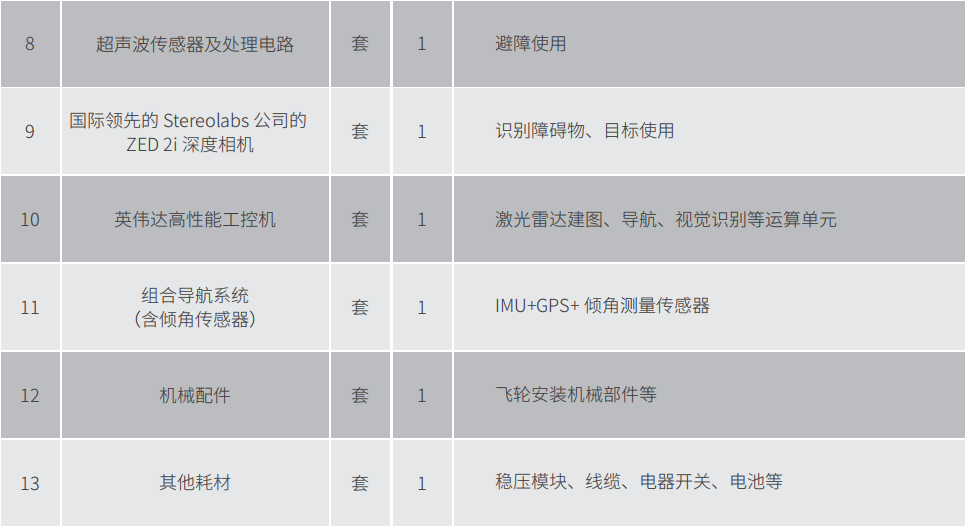
产品核心部件清单

- 上一篇:车规级无人驾驶智能车
- 下一篇:无


