

开源四足机器人
发布日期:2023-09-16 浏览次数:1979
产品概述
为更好地赋能机器人的研究和产业化,公司推出自主研发的开源四足机器人。开源四足机器人是基于CSPACE控制系统和MATLAB/Simulink开发的教科研平台,由机器人本体、控制系统、上位机和稳压电源组成。每条机械腿有3个关节,每个关节超高性能直流无刷电机、准直驱行星减速结构、双绝对式编码器和伺服驱动器组成。该四足机器人系统使用全自主研发的运动控制器,为教学和科研提供优越的开放性支撑。
系统控制算法代码开源,提供丰富的运动学控制实验实验案例,如正逆运动学实验、轨迹算法实验等。该系统既可以作为自动化、机器人、机械电子、智能制造、机械工程等专业中的《机器人学导论》、《机器人控制技术》、《计算机控制技术》、《电机与伺服控制》、《机器人学》、《机器人机电一体化技术》 等课程的配套实验实践平台,也同时支撑相关专业和课程的运动学、动力学及伺服驱动算法的科研平台。
平台特色
(1)开源工业四足机器人产品为实验载体,支撑机器人建模仿真、机器人运动学及控制、机器人步态规划等教学实验,以及科研领域的算法验证实验和打磨等高级应用的控制实验等;
(2)控制器采用CSPACE-RT版进行开发,硬件基于国产芯片RK3568,外设接口丰富,运算速度快,运算能力强,采用Matlab/Simulink 软件进行编程开发,可以更好更快地研究高级自动控制算法;
(3)关节模组含有超高性能直流无刷电机、准直驱行星减速结构和双绝对式编码器,具备强劲的关节动力、灵敏的力控性能以及精准的角度反馈能力;
(4)深度开源,提供丰富的机器人运动学控制案例,方便地掌握四足机器人控制系统的技术,进行更深入的研究;
(5)紧凑的关节驱动器结构和低惯量腿足设计,使其运动更高效、更灵活。
系统平台组成
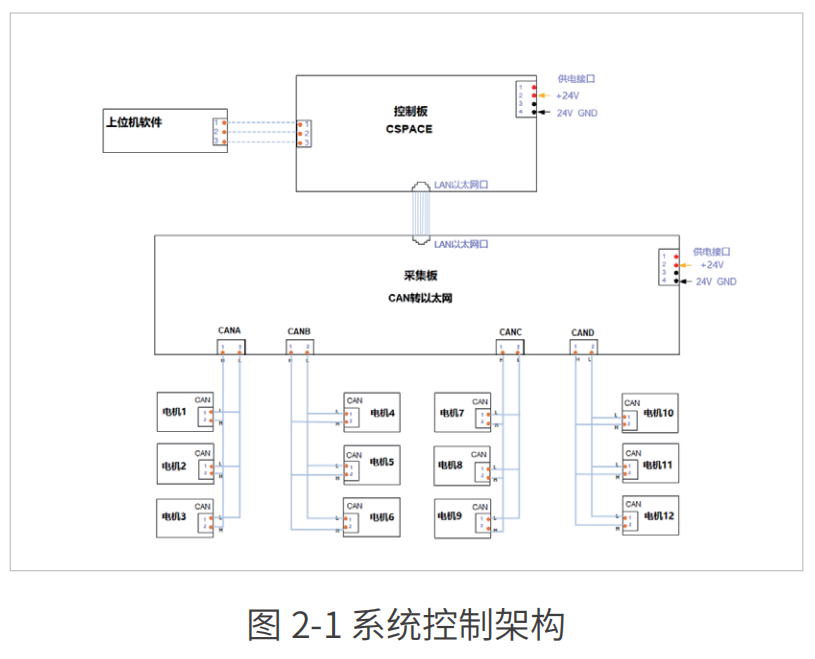
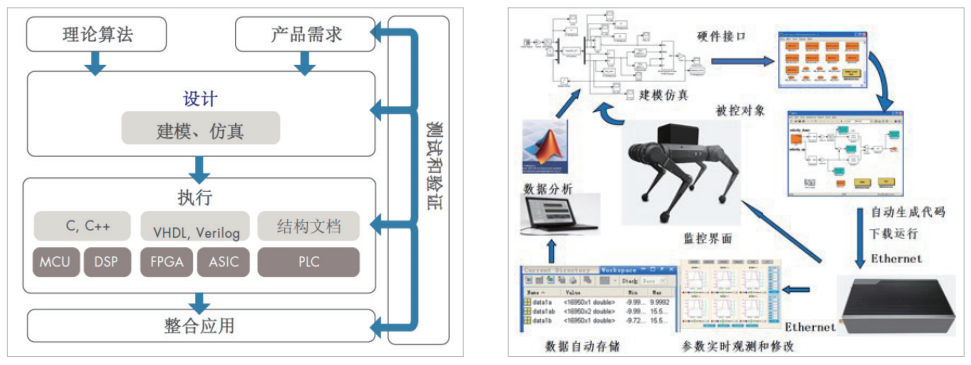
本公司开发的四足机器人由四足机器人本体、CSPACE控制系统、上位机软件、控制系统仿真与算法模型组成。其中上位机负责发出切换运动状态的指令与监测各关节角度,控制系统负责根据不同的运动状态计算各关节角度并将其发给机器人的驱动器,最后驱动器控制四足机器人进行相应运动。四足机器人的系统控制架构如下图所示。
四足机器人本体
四足机器人的机械结构由躯干和四条机械臂组成,其中,躯干用于放置芯片、电机驱动、电源系统并连接四条机械臂。机械臂用于为机器人提供动力,每条机械臂具有3个关节,每关节使用一个电机进行控制,一共使用了12个电机。其中电源系统的结构如下图。


CSPACE实时控制系统
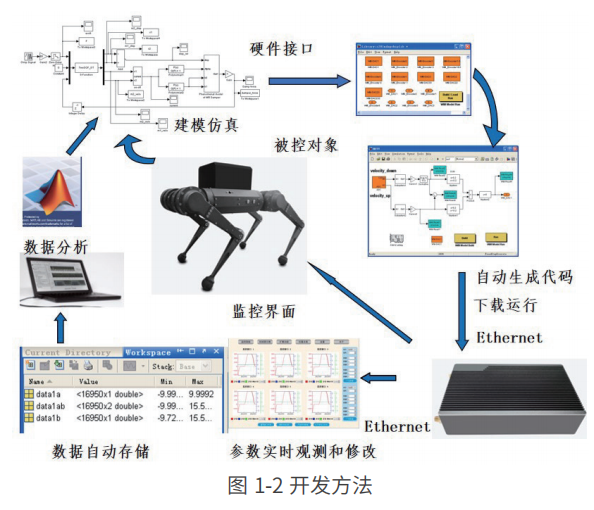
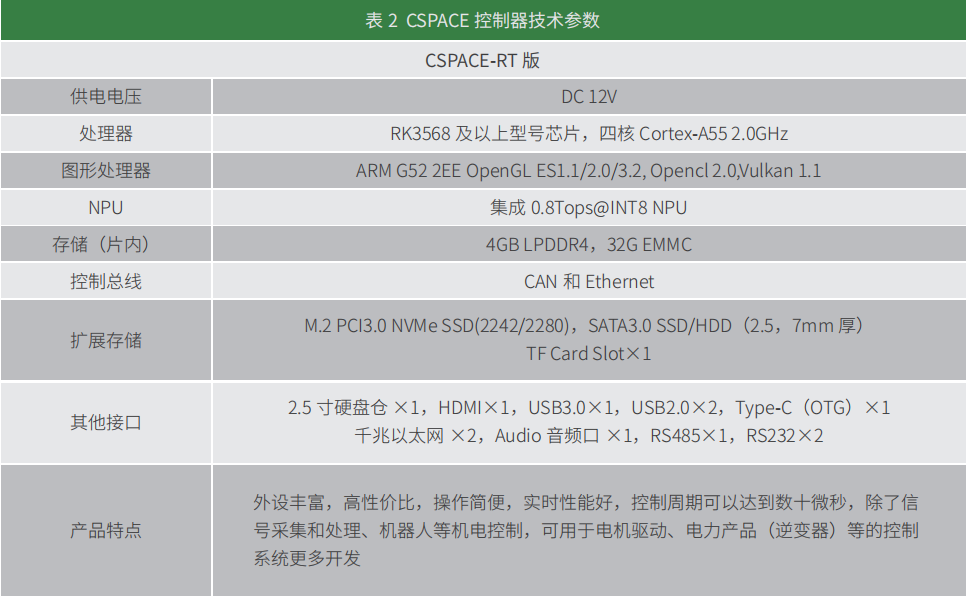
CSPACE控制与半实物仿真系统是基于ARM Cortex-A架构和MATLAB/Simulink开发。外设接口丰富,板载实时操作系统,以及一套功能强大的监控软件。结合计算机仿真和嵌入式实时控制技术,能实现硬件在回路(HIL)和快速控制原型(RCP)设计的功能,也是用于进行基于模型设计(MBD:Model-Based Design)控制系统开发的教学和科研产品。CSPACE控制器参数如表3所示。
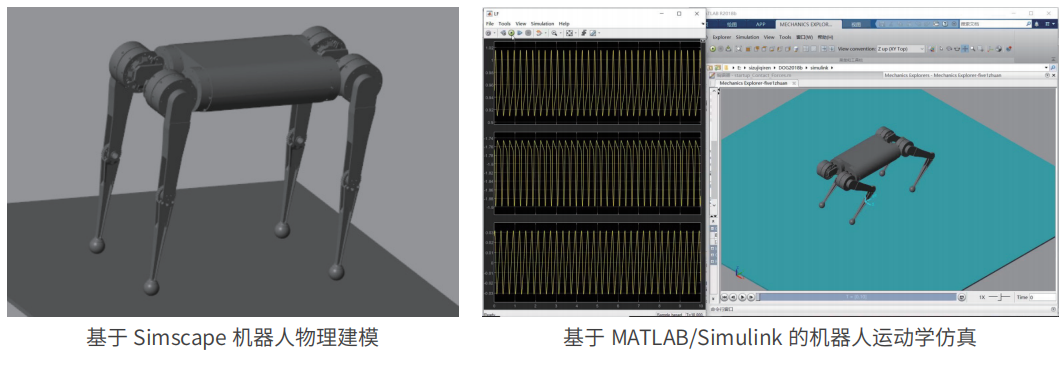
开源仿真算法软件
上位机软件
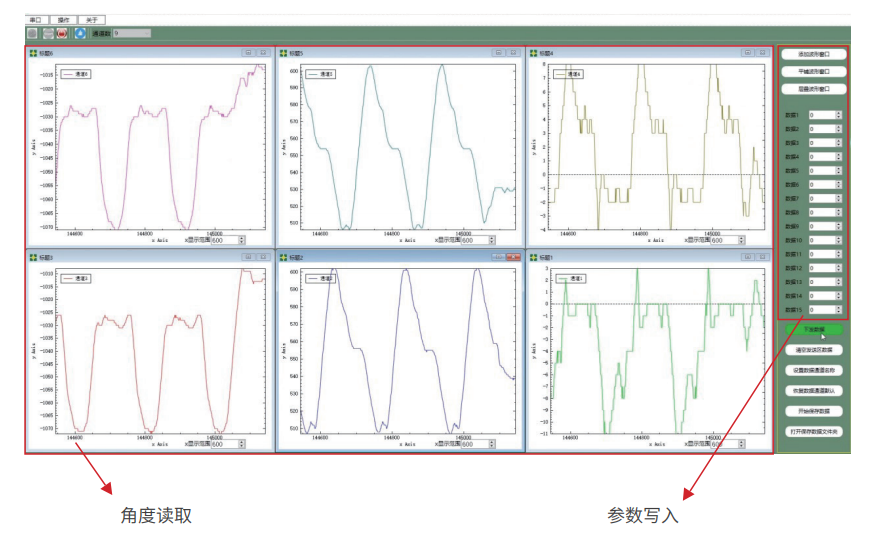
用户上位机软件通过无线通信线与控制器连接。
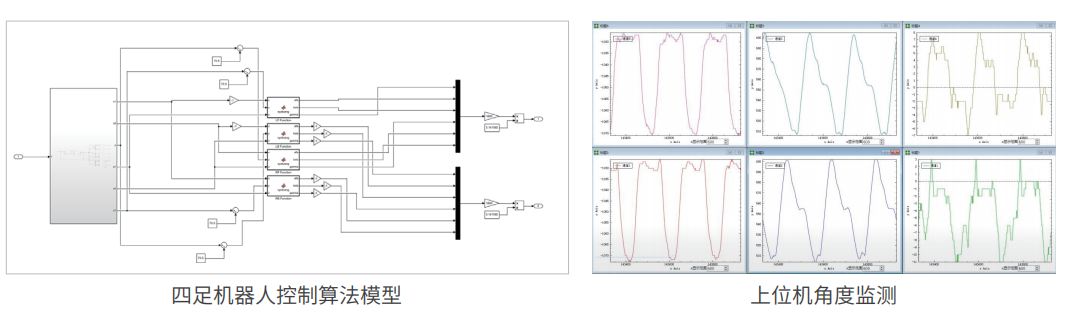
用户界面软件能实现采集10路数据,如可以采集各个关节的角度数据,在控制器的Simulink程序中进行设定显示的变量,并进行波形显示。可以控制四足机器人的各个关节、角度、运动模式,显示各个关节的角度,对相应的数据进行监测与修改,对程序进行调试。
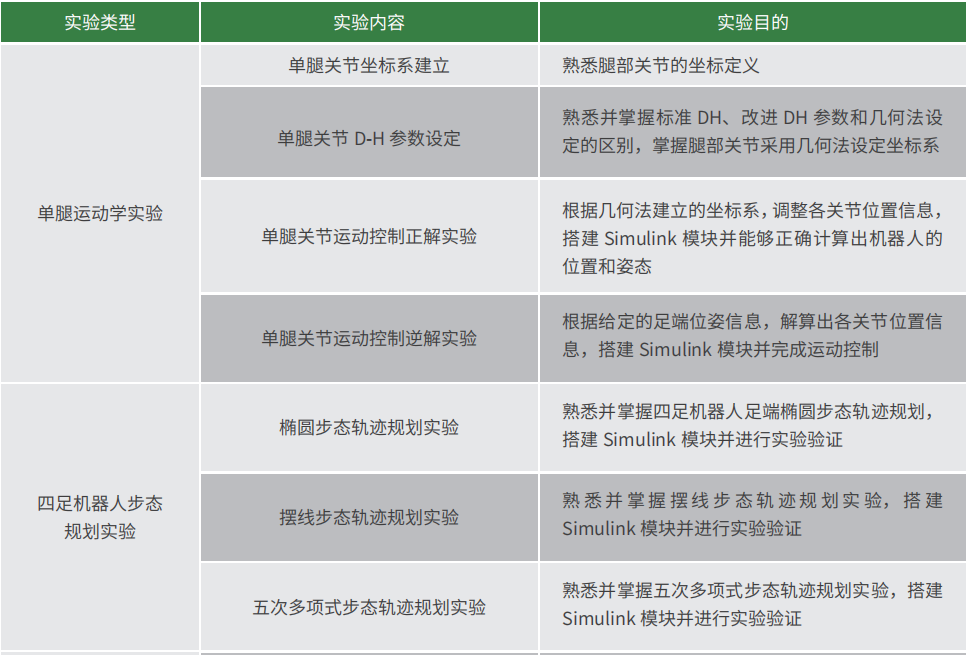
实验内容一览
下列实验内容为可以在本平台完成的所有实验列表,所有实验程序均在Matlab/Simulink软件中编写,所有程序源代码均开放,可以自由修改,实验均配有演示视频。

基础实验演示视频

支撑的教学科研

- 上一篇:液压重载多足类机器人
- 下一篇:车规级无人驾驶智能车


