

开源两关节助行机器人(髋部)
发布日期:2023-09-18 浏览次数:3763
产品概述
为更好地赋能机器人的研究和产业化,公司推出自主研发的开源两关节助行机器人系统,核心运动控制系统全自主开发。
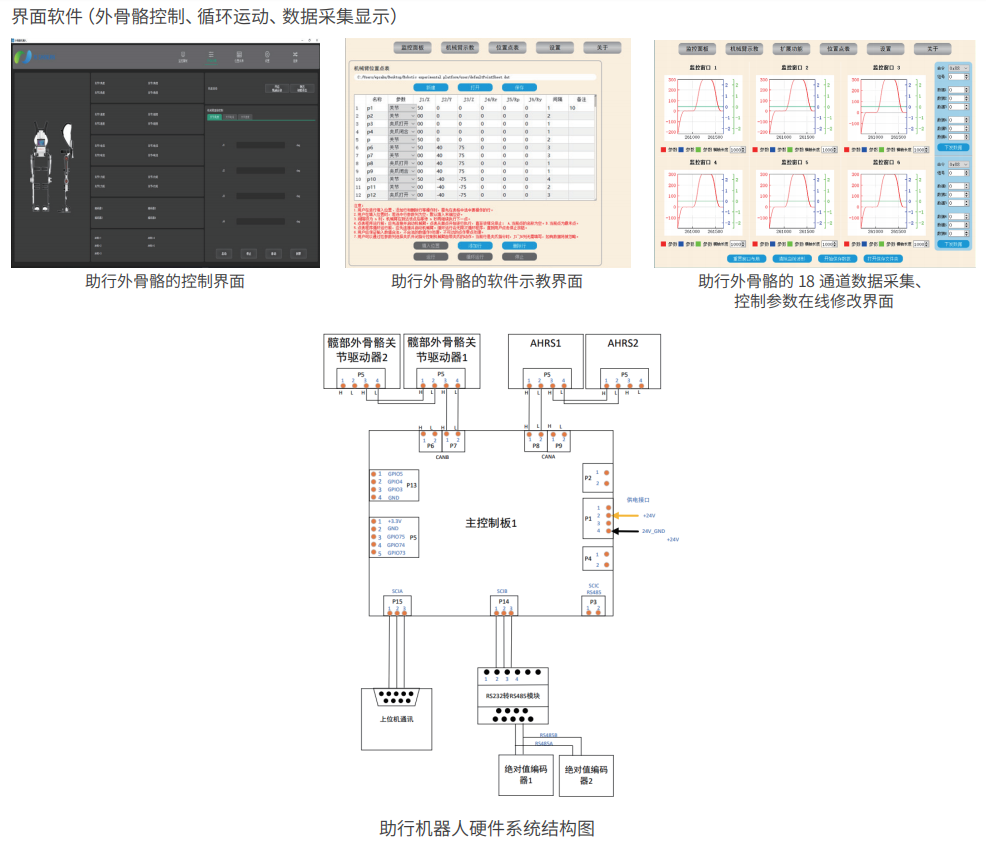
采用基于模型设计(MBD)工程开发方法实现外骨骼运动学、动力学算法开发与应用,提供丰富的控制案例程序,配套有上位机监控软件,可实时修改控制参数、监控外骨骼的参数,不仅方便教学,还能为深层次的外骨骼机器人或相关的机器人科研提供研发平台。

产品特色
(1)开源成熟关节模组为实验载体,支撑机器人建模仿真、机器人运动学及控制,以及科研领域的算法验证和柔顺控制等高级控制实验等;
(2)控制器采用 CSPACE 控制系统进行开发,基于 CAN 总线通讯,控制周期可以达到 1ms。性能优良,运算能力强,支持Matlab/Simulink 软件进行编程和自动代码生成,可以更高效地研究高级控制算法;
(3)提供丰富的应用场景:被动跟随康复训练,主动柔顺控制,行走康复训练,定制步态轨迹进行训练等;
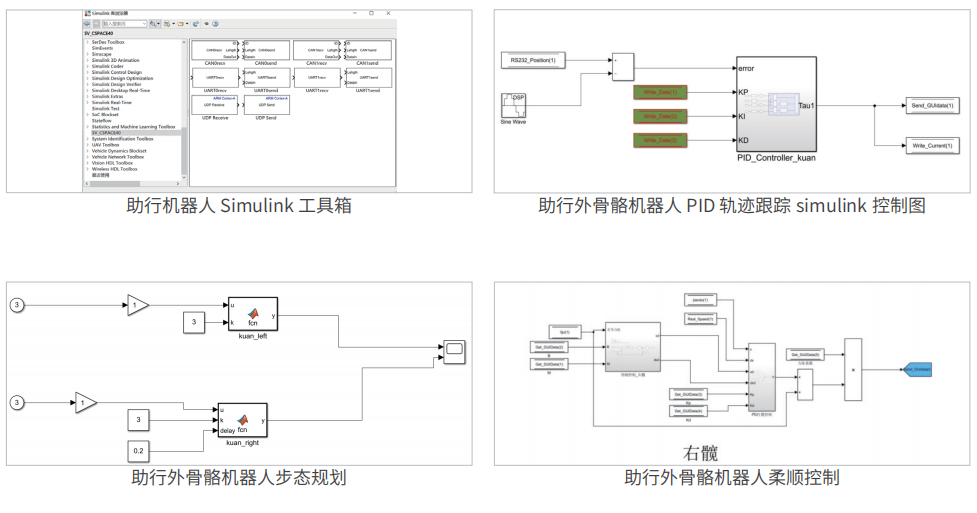
(4)提供丰富的仿真分析和开源算法:机器人工具箱运动学仿真、Simscape 物理联合仿真、PID 控制、柔顺控制算法等。
实验平台
1、机器人本体
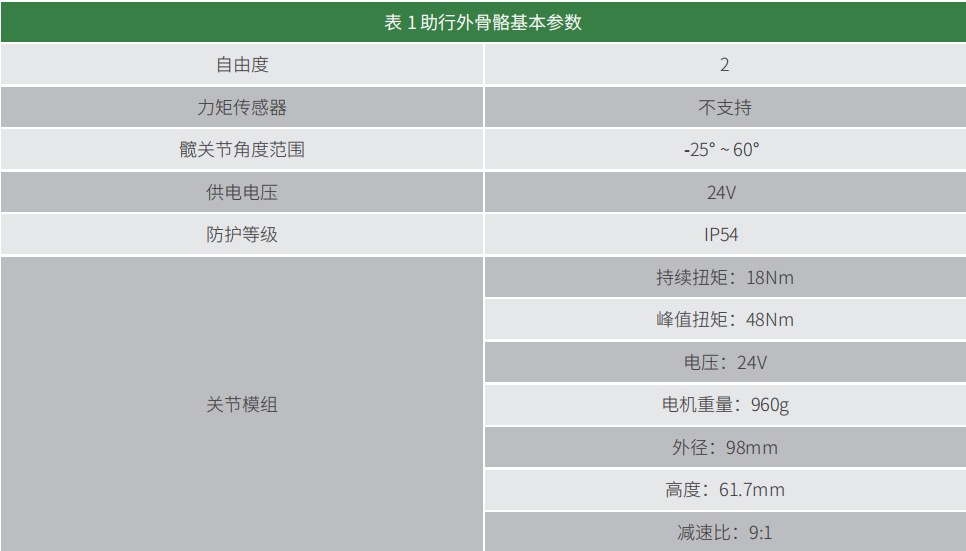
助行外骨骼技术参数如表 2 所示,本体为 2 自由度,结构紧凑,易于安装。机器人具有硬限位和软限位保护功能,工作安全适合人机协同的场合。机器人髋关节模组采用智能集成化设计,将谐波减速机、力矩电机、高精度绝对值编码器、高精度增量式光电编码器、驱动器等集成一体。

2、CSPACE控制器
助行外骨骼控制系统采用 CSPACE 控制与半实物仿真系统 2.0 版本,采用TITMS320F28335DSP 芯片进行开发。硬件外设接口丰富,并配有一套功能强大的监控软件。结合计算机仿真和嵌入式实时控制技术,能实现硬件在回路(HIL)和快速控制原型(RCP)设计的功能,也是用于进行基于模型设计(MBD:Model-BasedDesign)控制系统开发的教学和科研产品。CSPACE 控制器如下图所示,是可对标国际先进的控制与半实物仿真领域的产品。

实验内容一览
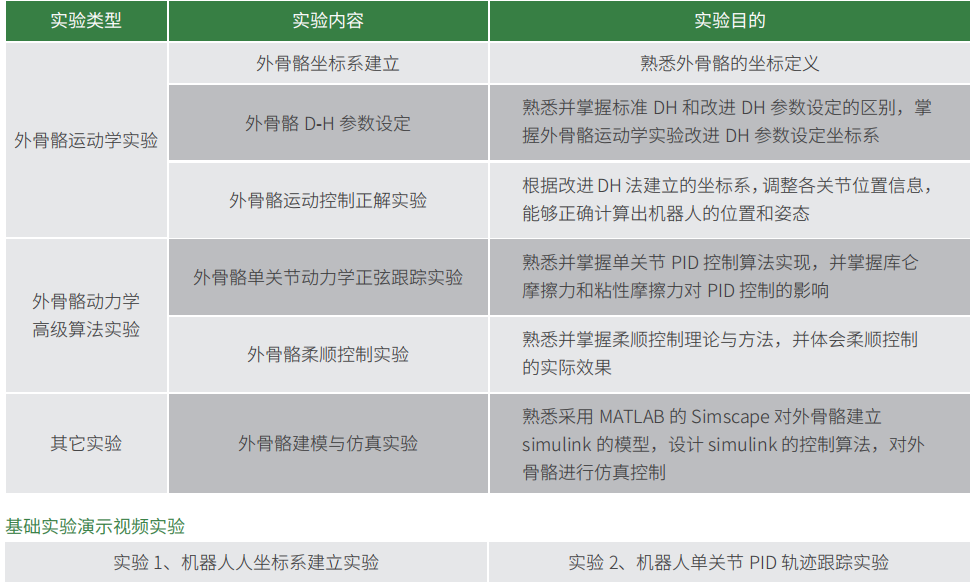
下表所列实验内容为可以在本平台完成的所有实验列表,所有实验程序均在 Matlab/Simulink软件中编写,所有程序源代码均开放,可以自由修改,实验均配有演示视频。
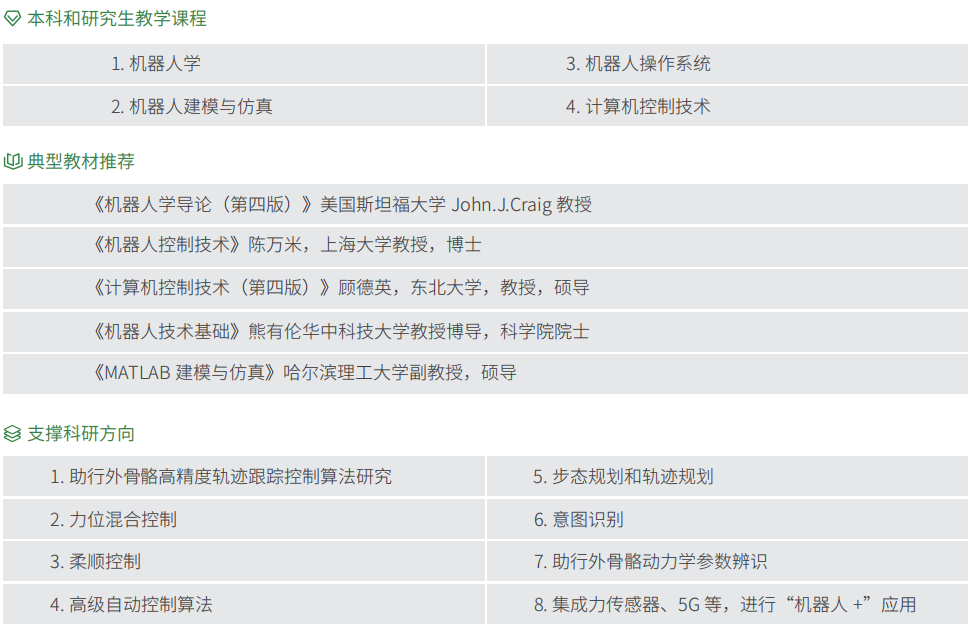
支撑的教学科研
- 上一篇:开源下肢外骨骼机器人系统
- 下一篇:液压重载多足类机器人


