

基于 ROS 的机械臂视觉分拣作业平台
发布日期:2023-09-19 浏览次数:3712
产品概述
农业作为经济发展的基础性产业和保障性产业,一直以来都受到各国的高度重视。我国作为水果生产大国,水果的分拣在整个生产运输链中占据着非常大的比重,传统农业中的水果分拣工作主要依赖人工,但该方式工作量大、效率低且速度慢。随着人工智能技术的发展,人工智能技术在农业上的广泛运用,正逐渐替代传统的人工劳作分方式。这种技术更迭降低了农民的劳动力,促进了现代农业的发展。基于 ROS 的机械臂视觉分拣作业平台正是采用协作机器人和机器视觉融合技术,针对农业上的水果分拣提出的一种实际可行且运作高效的解决方案。
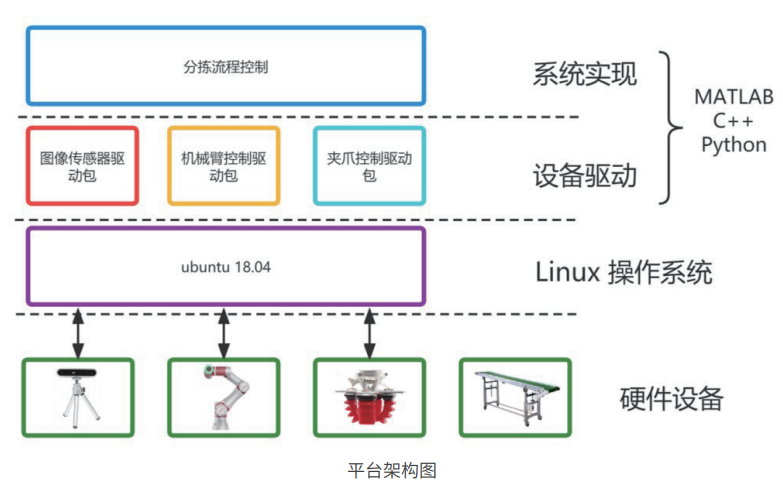
基于 ROS 的机械臂视觉分拣作业平台采用深度学习算法,对不同种类、不同成熟度、不同质量的水果进行自主识别和定位,并通过对协作机械臂的运动控制,实现对水果的柔性抓取和分拣。平台采用层次设计,从下往上依次为硬件设备层、操作系统层、设备驱动层和系统实现层。硬件设备层包括协作机械臂、末端夹具、深度相机、输送带。操作系统使用 Linux ubuntu18.04。设备驱动是指硬件设备在操作系统上的驱动程序,包括机械臂驱动、末端夹具驱动以及深度相机驱动。系统实现层主要是视觉分拣的逻辑程序。
平台采用开源及模块化设计,除了可进行视觉分拣的场景化应用及研究外,还可独立进行协作机械臂及深度视觉的教学与科研,如机械臂的定点运动实验、路径规划运动实验、拖动示教和碰撞检测实验等,如深度视觉的视觉标定、深度学习训练和深度识别等实验。
产品特点
(1)控制系统基于 ROS 架构,通用灵活,易扩展,各子模块均提供 ROS 接口。
(2)模块化设计,可进行分拣场景化研究,以及各组成部件的独立研究。
(3)采用工业级机械臂本体,具有较高的稳定性和适用性,精度较高。
(4)使用 OpenCV 进行开发,提供开源的图像处理算法和深度视觉应用案例。
(5)支持 Simulink 和 ROS 的联合开发,并提供开发相关案例。
(6)实验内容丰富详细,包含大篇幅的技术及知识点介绍。

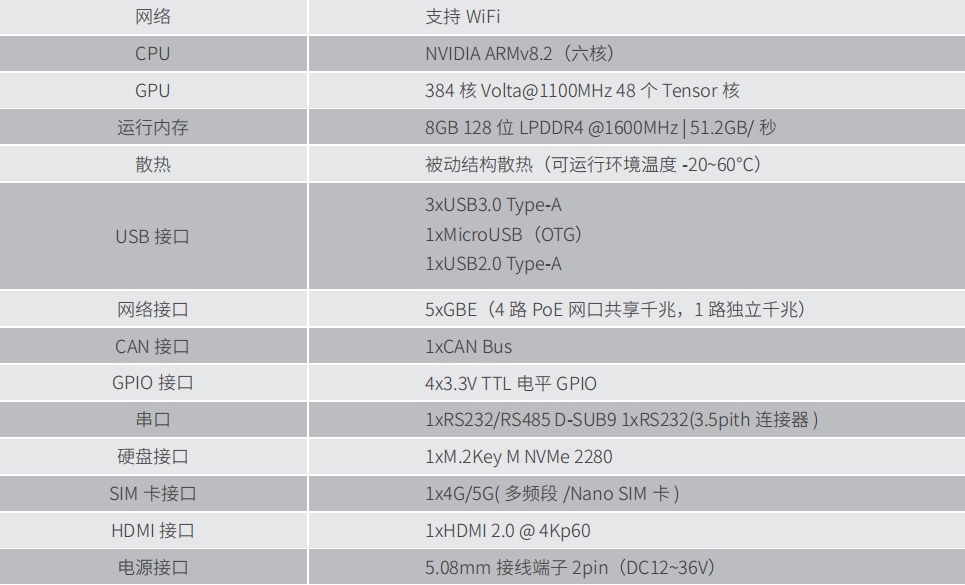
平台控制系统硬件参数
平台控制系统软件要求
(1)运行 ubuntu18.04 系统,系统支持安装 OpenCV,MATLAB,支持 Pytorch 框架。
(2)支持 ROS,具有以太网、串口和 RS485 等接口驱动。
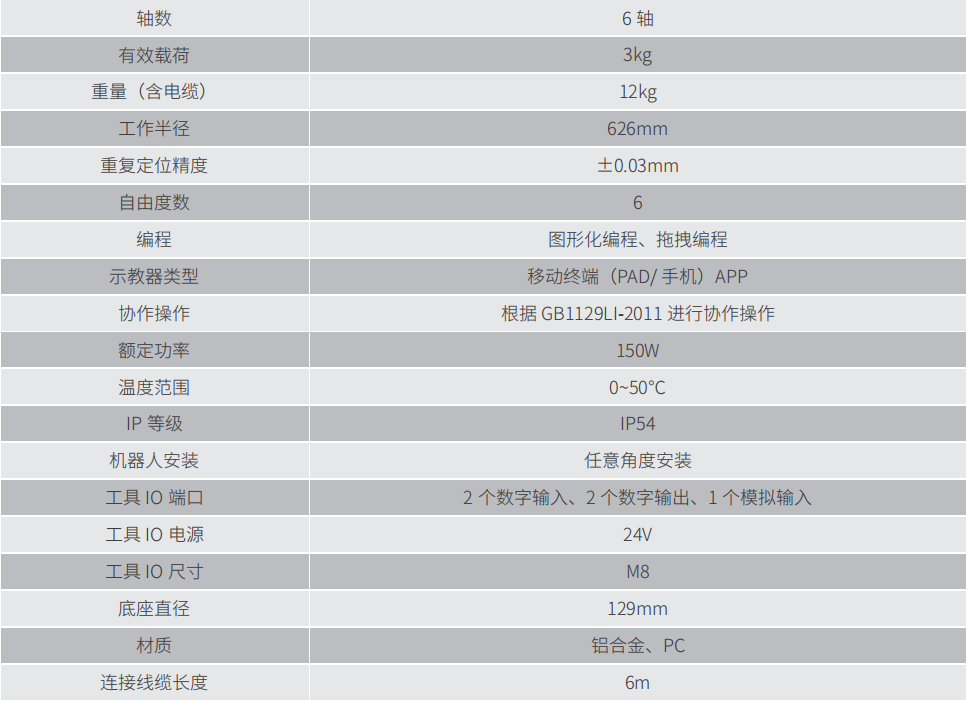
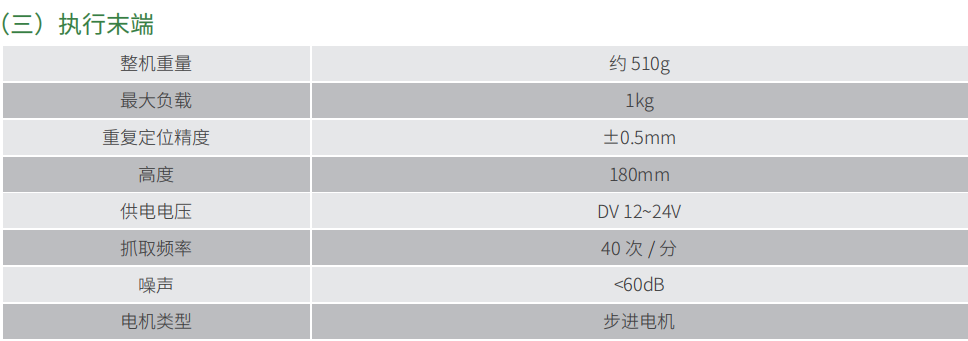
协作机械臂本体参数
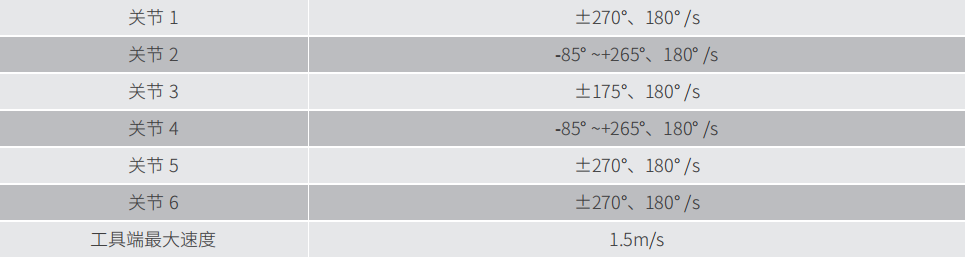
协作机械臂动作范围及速度
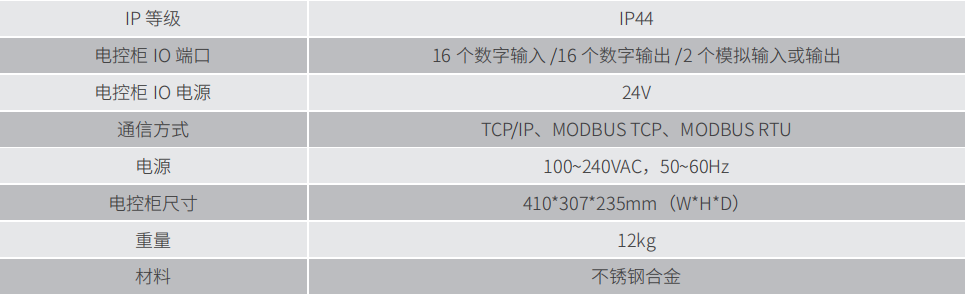
协作机械臂电控柜参数


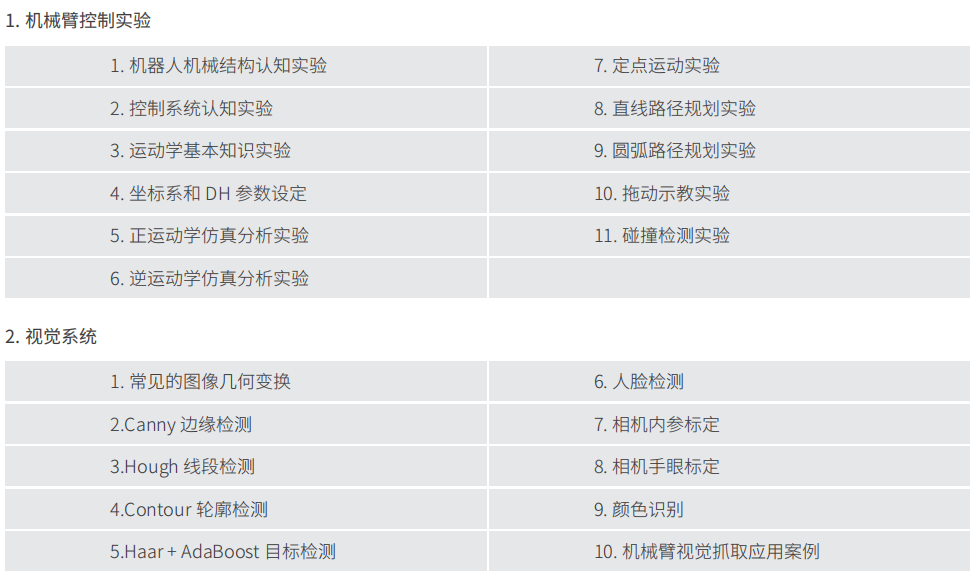
实验内容一览
- 上一篇:开源自动扎钢筋平台
- 下一篇:开源六轴协作机器人打磨工作站


