基于学习视觉的伺服平台
2021-06-05
概述
该系统主要是由目标检测、3D定位系统、web服务系统三个部分组成;采用NVIDIA Jetson AI边缘计算开发套件,搭配Realsense D4系列的RGBD相机,来对特定物体进行识别和定位。平台视觉系统采用学习视觉技术,针对不同种类的目标对网络结构进行训练,可以支持大多数的物体检测和定位;而且此伺服视觉系统,可扩展作为一个独立模块应用在不同研究领域,如机械臂抓取的视觉定位,无人驾驶周围环境感知和定位、传送带物体分拣、智能仓储的视觉等部分。此外还可以针对不同的应用场景,拥有多种模式的检测功能:第一种模式对实时性无要求,拥有j较高识别率的检测模式;第二种模式对识别率无要求,拥有较高的检测速度;并且在算法和底层控制程序开源,集成多种功能于一体为教学和科研提供较优越的开放性支撑。

产品特点
❖ 高度模块化,可以自由搭配各种视觉场景的使用。
❖ 支持视觉算法的硬件加速
❖ 采用主流学习框架pytorch,有利于学术研究。
❖ 可以支持多种视觉传感器
❖ 对外提供多种方式的控制接口
❖ 支持tensorrt模型的加速推理
❖ 针对不同的应用场景,支持多种检测模式
❖ 实验案例内容丰富详细,包含大篇幅的技术及知识点介绍
❖ 资料开放,支持二次开发,提供二次开发技术支撑
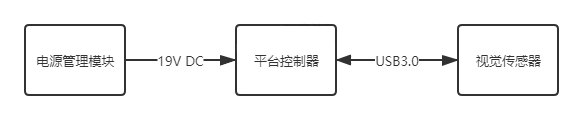
平台结构
应用技术

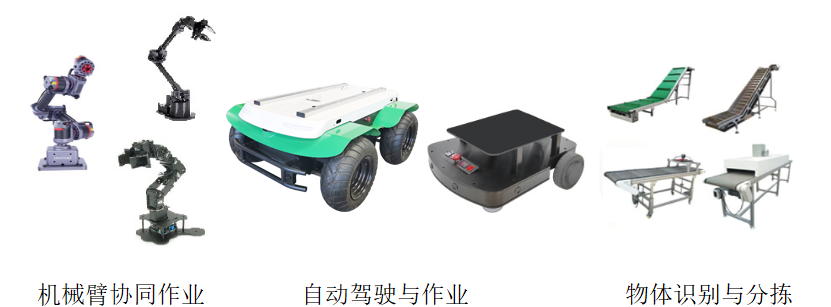
应用领域
案例应用
1、基于学习的水果采摘应用
2D和3D数据融合在机械臂抓取方向应用十分广泛,利用2D图像进行定位然后结合图像来得到物体的三维信息,从而使得机器能够感知三维环境中分物体的位置和姿态。
水果采摘在实现农业自动化有着重要意义,此应用能够实现基本场景的水果抓取,识别率能够达到99%。

2、基于学习的车道线检测应用
车道线检测是自动驾驶中的一个基础模块,其实也是一个由来已久的任务,语义上车道线存在位置的检测,即使它是模糊的、被光照影响的、甚至是被遮挡的,基于传统图像处理的方法几乎无法实现检测,而基于一种最直接的学习方案——把车道线检测视为分割任务。利用视觉传感器获取图像数据,经过卷积神经网络的处理得到车道线的结果。

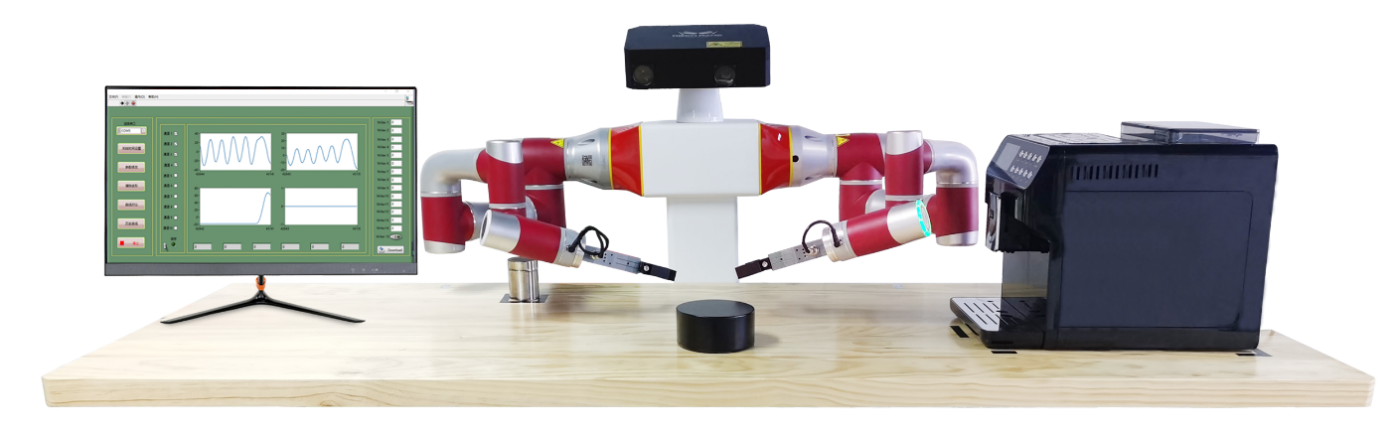
3、基于学习的双臂咖啡机应用
双臂协作咖啡机器人采用2台Jaka Zu3机械臂,融合学习技术和视觉技术,并搭配相机、夹爪、胶囊咖啡机和咖啡制作用品,实现自动化、智能化的咖啡制作。
用户只需在相机前做出相应手势,咖啡机器人就会自动拾取用户指定口味的胶囊,完成放置咖啡杯、启动咖啡机、端送至用户面前等一系列动作,不需要等待很久便将一杯咖啡递入用户手中。
一方面,咖啡机器人减轻了咖啡师的劳动强度,让人从繁琐的操作中解脱出来。另一方面,咖啡机器人制作咖啡的品质更加稳定,不考虑换料的话,它稳定地保持相关动作,保证品质不走样。
开发概图


版权所有 中科深谷科技发展有限公司 皖ICP备17007209号备案
免责声明 技术支持:网新科技(www.ibw.cn)