
开源6D并联机器人系统
2021-04-27
一、平台概述
六轴(6D)并联机器人系统的本体是由六支可伸缩电动缸、上下平台以及上下各六只万向节组成,控制系统是基于MATLAB/Simulink和DSP 28335设计,采用基于模式设计(MBD:Model-Based Design)的开发方式,对并联机器人的运动进行分析、仿真和设计开发。通过六支电动缸的伸缩运动,完成上平台在空间六个自由度(x,y,z,α,β,γ)的运动,从而可以模拟出各种空间运动姿态。
系统提供伺服驱动、机器人仿真、运动学逆解等实验案例,并针对实验案例,提供相应的开源算法,满足高等院校、科研机构在传动及控制技术领域的教学科研等工作。
该系统涉及了机械、液压、电气、控制、机器人、计算机、传感器、信号处理等专业,可作为这些专业相关课程的配套教学平台之外,还可商业化后应用到各种训练模拟器如飞行模拟器、舰艇模拟器、海军直升机起降模拟平台、坦克模拟器、汽车驾驶模拟器、火车驾驶模拟器、地震模拟器以及动感电影、动感娱乐设备等领域,甚至可用到空间宇宙飞船的对接,空中加油机的加油对接。
该系统的产品特点有:
1.机械本体部分采用工业级的电机及伺服电动缸,负载大,性能稳定,定位精度高。
2.底层伺服驱动代码开源,采用MATLAB/Simulink开发,支持用户进行电机算法研究以及二次开发
3.机器人运动学采用MATLAB/Simulink进行开发,模块化图形化编程方式,提供开源的算法及实验案例,最大程度满足高校各专业的教学科研需求。
4.系统采用MBD的设计方法,涉及分析、建模、仿真、实物控制等过程
5.配备友好的人机交互界面,可进行机器人运动控制及实时位姿反馈,并可进行其他自定义控制命令下发、数据波形显示记录等
6.机械结构上配有限位开关,提供安全保护功能
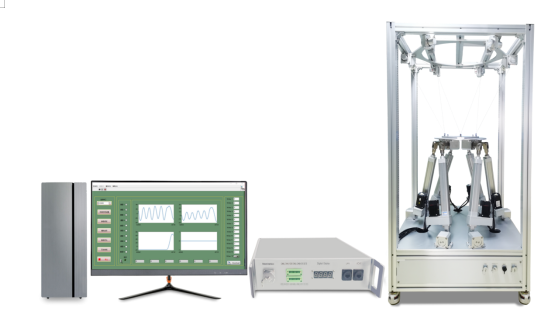
二、平台硬件组成
系统包含机械结构、电动缸、驱动系统、控制系统和上位机。
机械结构:
结构由底座、上下平台、电动缸、上下平台及上下各六只万向铰链组成。
电动缸:
电动缸是将伺服电机与丝杠一体化设计的模块化产品,该电动缸以电力作为直接动力源,采用低压交流伺服电机带动丝杠旋转,并通过构件间的螺旋运动转化为丝杠的直线运动,再由丝杠带动缸筒或负载做往复直线运动。
该伺服电动缸参数如下所示:表号与表名,后不赘述
|
电机额定功率 |
400W |
|
电机额定电压 |
48V |
|
电机额定扭矩 |
1.27Nm |
|
瞬时最大扭矩 |
3.2Nm |
|
额定转速 |
3000rpm |
|
瞬时最大转速 |
3200rpm |
|
额定电流 |
10A |
|
瞬时最大电流 |
25A |
|
缸径 |
40mm |
|
重复定位精度 |
±0.02mm |
|
导程 |
5mm |
|
最大推力 |
1280N |
|
最快速度 |
250mm/s |
|
最长行程 |
250mm |
|
最大负载质量 |
40kg |
|
螺杆等级 |
C7 1205 |
|
活塞杆旋转角度 |
±0.3度 |
|
最大驱动扭矩 |
1.8Nm |
|
磁性开关 |
24V NPN 常开 |
驱动系统:
驱动系统由6个开关电源和6个驱动器组成,均安装于机械结构的底座的内部。
开关电源的220V输入由底座前方的“AC220V输入接口”及“AC220V急停开关”提供,开关电源的48V输出作为驱动器的电源输入。每个开关电源和驱动器独立向每个伺服电动缸提供电源。
开关电源参数
|
输出 |
输出电压 |
48V |
|
额定电流 |
7.3A |
|
|
额定功率 |
350.4W |
|
|
最大纹波噪声 |
200mVp-p |
|
|
电压调整范围 |
43.2V~52.8V |
|
|
电压精度 |
±1% |
|
|
线性调整率 |
±0.5% |
|
|
负载调整率 |
±0.5% |
|
|
启动、上升时间 |
1500ms,50ms/230VAC; 1500ms,50ms/115VAC(满载) |
|
|
保持时间 |
16ms/230VAC; 12ms/115VAC(满载) |
|
|
输入 |
电压范围 |
90~132VAC/180~264VAC(通过开关选择) 240~370VDC(开关开启230VAC) |
|
频率范围 |
47~63Hz |
|
|
效率 |
89% |
|
|
交流电流 |
6.8A/115VAC;3.4A/230VAC |
|
|
浪涌电流 |
冷启动60A/115VAC;60A/230VAC |
|
|
漏电流 |
<2mA/240VAC |
|
|
保护 |
过负载 |
额定输出功率的110~140% |
|
|
关断输出,重启恢复 |
|
|
过电压 |
55.2~64.8V;关断输出电压,重启恢复 |
|
|
过温度 |
关断输出电压,重启恢复 |
|
|
功能 |
风扇控制 |
RTH3≥50℃开启,≤40℃关断 |
|
环境 |
工作温度 |
-25~70℃ |
|
工作湿度 |
20~90%RH,无冷凝 |
|
|
储存温度、湿度 |
-40~85℃,10~95%RH |
|
|
温度系数 |
±0.03%/℃(0~50℃) |
|
|
耐振动 |
10~500Hz,5G 10分钟/周期,X、Y、Z各60分钟 |
|
|
安规 |
安全规范 |
IEC/UL62368-1,BSMI CNS14336-1,EAC TP TC 004,KC |
|
耐压 |
I/P-O/P,I/P-FG,O/P-FG:100M Ohms/500VDC/25℃/70%RH |
|
|
电磁兼容发射 |
符合BSMI CNS13438,EAC TP TC 020,KC KN32 |
|
|
电磁兼容抗扰度 |
符合EAC TP TC 020,KC KN32 |
|
|
其他 |
尺寸 |
L215mm*W115mm*H30mm |
|
重量 |
0.76kg |
驱动器参数
|
动力电源 |
24VDC~60VDC(典型48V) |
|
逻辑电源 |
从动力电源转换 |
|
最大连续输出电流 |
15A |
|
峰值电流 |
30A |
|
反馈信号 |
支持HALL+增量式光电编码器、485总线的绝对值编码器(多摩川) |
|
能耗制动 |
需外接制动电阻(根据实际情况而定) |
|
能耗制动电压吸收点 |
可设置 |
|
过压报警 |
可设置 |
|
欠压报警 |
可设置 |
|
冷却方式 |
风冷 |
|
重量(KG) |
0.2KG |
|
输入规格 |
RS232、CAN总线 |
|
输入功能 |
电流、速度、位置控制;驱动器参数的设置 |
|
输出规格 |
CAN总线 |
|
输出功能 |
查询驱动器状态 |
|
机械抱闸 |
具有机械抱闸的驱动电路和接口 |
|
RS232通信 |
最大支持115.2K波特率,自定义协议 |
|
保护功能 |
超速、过流、过压、欠压、过载、超差、编码器故障、内部芯片故障、模块故障 |
|
CAN通信 |
最大支持1M波特率,自定义协议;支持CANOpen协议(定制) |
|
工作温度 |
0~40℃ |
|
保存温度 |
-20~85℃ |
|
湿度 |
40%~80%RH无结露 |
|
保护等级 |
IP20 |
|
安装场所 |
无粉尘干燥 |
|
安装方式 |
垂直安装 |
|
高度 |
1000m以下 |
|
大气压 |
86kPa~106kPa |
控制系统:
控制系统由控制器和稳压电源组成。
稳压电源向控制器提供48V左右恒定电压。控制器使用CAN总线,通过机械结构底座上的接口,向伺服驱动器发送控制命令,同时读取伺服驱动器状态和电动缸状态。
|
处理器 |
TMS320F28335 |
|
处理器主频 |
150MHz |
|
IO输入输出 |
3通道 |
|
AD输入(定制) |
16通道,0~3V,12位,转换时间250ns;6通道,-10V~10V,16位,转换时间3.1us |
|
DA输出(定制) |
4通道,-10V~10V,16位,建立时间10us |
|
编码器(定制) |
支持2通道的数字增量式、32位计数、最大输入频率20MHz |
|
通讯接口 |
SCI、RS485、CAN2.0A |
开发概图
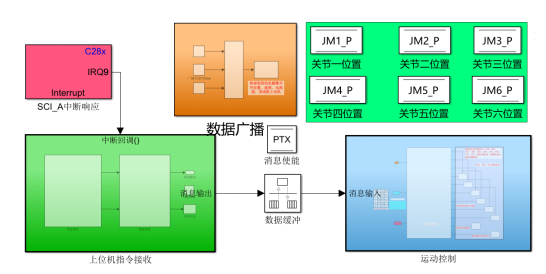
Simulink模型图
三、实验内容
列表3所列实验内容为可以在本平台完成的所有实验列表,所有实验程序均在Matlab/Simulink软件中编写,所有程序源代码均开放,可以自由修改,实验均配有演示视频。
|
实验内容 |
实验目的 |
|
并联机器人认知实验 |
熟悉并联机器人结构及定义 |
|
并联机器人运动学基础 |
掌握并联机器人的旋转矩阵及坐标变换 |
|
并联机器人基本控制实验 |
掌握串口通信和CAN通信 |
|
并联机器人运动学逆解仿真实验 |
掌握并联机器人的逆解求解方法 |
|
并联机器人运动学逆解实时控制实验 |
掌握并联机器人的实物控制模型算法 |
本科和研究生教学课程:
1.机器人学
2.机器人建模与仿真
5.机器人操作系统
6.计算机控制技术
典型教材推荐:
《机器人学导论(第四版)》美国斯坦福大学John.J.Craig教授
《机器人控制技术》陈万米,上海大学教授,博士
《计算机控制技术(第四版)》顾德英,东北大学,教授,硕导
《机器人技术基础》熊有伦华中科技大学教授博导,科学院院士
《MATLAB建模与仿真》哈尔滨理工大学副教授,硕导
支持科研方向
1.并联机器人正解算法研究
2.并联机器人速度加速度研究
3.并联机器人应用
4.并联机器人建模研究
5.并联机器人控制研究

版权所有 中科深谷科技发展有限公司 皖ICP备17007209号备案
免责声明 技术支持:网新科技(www.ibw.cn)