
双摆智能控制系统
2023-08-08
产品概述
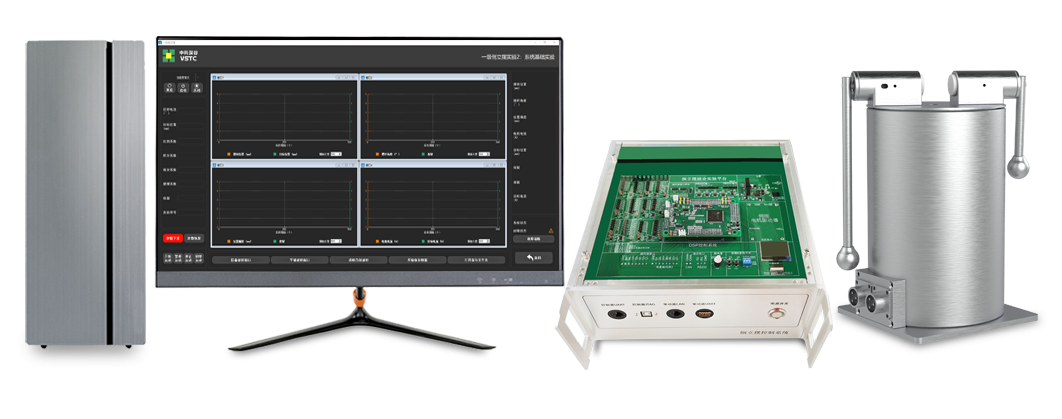
双摆智能控制系统由倒立摆本体、控制系统、伺服系统、角度传感器、人机交互界面和开源算法资源包组成。其倒立摆本体采用一长一短双摆杆并联结构,可自由分解形成两种环形一级倒立摆;控制系统硬件基于DSP开发、软件基于Matlab/Simulink开发;伺服系统支持力矩和加速度两种控制模式;角度传感器使用绝对值编码器,采用CAN总线通信方式;开源算法资源包包含系统建模仿真、根轨迹分析、线性系统矫正、LQR、滑模控制、神经网络控制、强化学习控制等算法案例。
该平台开发方式简单,教学科研资源案例丰富,可以作为机电相关专业《自动控制原理》、《现代控制理论》、《智能控制理论》等相关课程的实践教学平台,也可以作为控制理论相关专业和方向师生做基于时间最优、能量最优双摆同时控制的高级控制策略科研平台。
产品特点
开放性
基于TI TMS320F28335 DSP和MATLAB/Simulink开放式硬件控制开发平台,代码均开源,可支持研究人员开发自主的算法并进行控制,实现更复杂的控制算法验证。
本土化
采用自主研发的驱动器,支持电流,速度,位置及加速度四种模式的控制。
先进性
采用MBD的工程设计方法,提升科研效率,降低科研成本。
创新性
开源倒立摆+CSPACE 实现复杂控制对象的控制算法验证,赋能科研成果,高水平论文发布。
工业化
采用工业先进的电机及其运动机构,建立更精确的数学模型。
完善性
配套资料丰富,涵盖直线电机驱动器、运动控制、机电系统建模、经典控制理论实验、现代控制理论实验等内容。
丰富性
知识点包含数学建模、自动控制知识、建模、仿真、实时控制、MATLAB/Simulink、TI TMS320F28335 DSP的开发与应用。
应用专业
车辆工程、机器人专业、机械电子专业、机械工程专业、自动化专业智能制造专业、人工智能专业
支持课程
自动控制原理、现代控制工程、、计算机控制技术、机器人控制技术、智能控制基础与实践、电机学、伺服电机与驱动技术、MATLAB建模与仿真
支撑科研
直线电机高精度轨迹跟踪控制算法研究
动力学控制
高级自动控制算法
可伸缩摆杆的倒立摆系统控制算法研究
教学案例
客户单位 研究方向
清华大学 自动控制原理实验教学
高级控制算法验证
中国科学技术大学 自动控制原理实验教学
国防科技大学 自动控制原理实验教学
山东科技大学 变杆长倒立摆算法研究
浙江大学 自动控制原理实验教学
深圳大学 自动控制原理实验教学
智能控制课程教学
青岛理工大学 自动控制原理实验教学
安徽理工大学 自动控制原理实验教学
北京理工大学 高级控制自适应算法研究
长沙理工大学 自动起摆算法的研究
湘潭大学 高级控制摩擦力补偿算法的研究
武汉理工大学 自动控制原理实验教学
哈尔滨工业大学 高级控制模糊控制算法的研究
华为 自动起摆演示平台
长春光机所 滑膜控制算法的研究
常州工学院 自动控制原理实验教学
合肥大学 自动控制原理实验教学
科技馆 自动起摆演示平台
中国矿业大学 神经网络控制算法研究
湖州师范学院 自动起摆算法研究
山东师范大学 自动控制原理实验教学
安徽科技学院 自适应模糊控制算法研究
......
实验室建设
1. 实验室建设功能
该实验室可以作为自动化专业、机器人工程专业、电气工程及其自动化专业、机械电子工程专业的《自动控制原理》、《现在控制理论》、《控制工程基础》等课程的相关实验平台,能够完成典型系统的时域响应和稳定性分析、根轨迹、线性系统矫正、PID控制、LQR控制、神经网络控制、模糊控制等实验内容。
2. 实验室建设效果图

3. 实验室建设案例
目前已有浙江大学、中国科学技术大学、华中科技大学、深圳大学 、武汉理工大学、长沙理工大学、 北京理工大学、 北京信息科技大学、 青岛理工大学、 山东大学、山东科技大学、 重庆师范大学、广州大学、安徽理工大学、上海工程技术大学、合肥大学等多所高校使用上述设备建设智能控制实验室。



版权所有 中科深谷科技发展有限公司 皖ICP备17007209号备案
免责声明 技术支持:网新科技(www.ibw.cn)