
机械臂关节模组实验平台
2023-08-09
产品概述
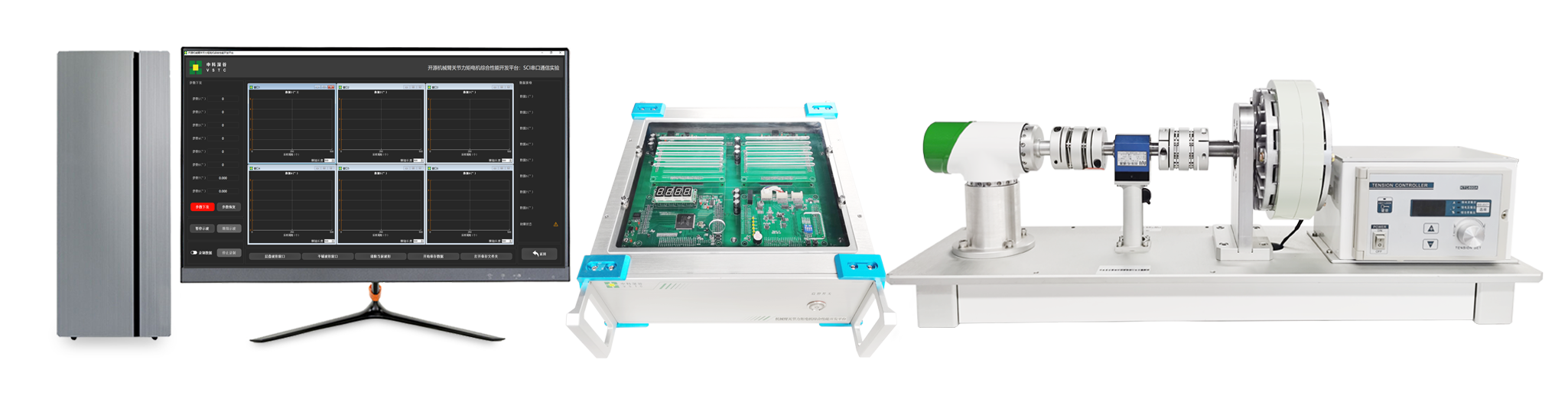
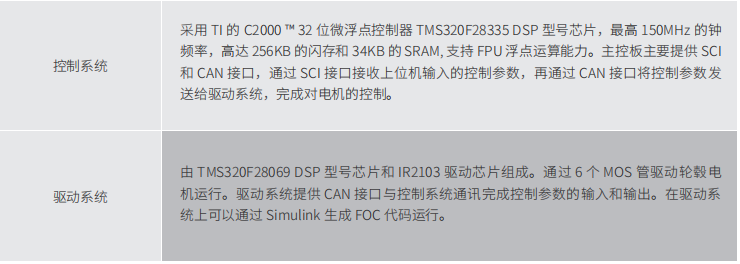
机械臂关节力矩电机综合性能开发平台是基于TI TMS320F28335 DSP和MATLAB/Simulink开发。该平台是由机械臂关节模组、扭矩传感器、磁粉制动器、控制系统和上位机、数据库组成。用于进行机械臂关节模组驱动器FOC磁场定向控制、SVPWM、电流速度位置三闭环等算法的研究,也可以对电机的机械特性、电气特性进行测量和分析的综合的平台。
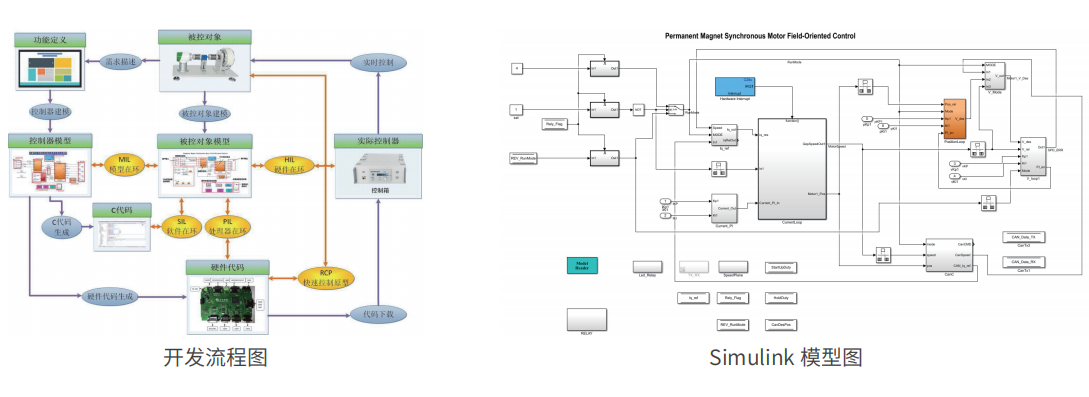
该平台采用基于模型设计(MBD)的快速控制原型开发系统的工程设计方法,能实现自动代码生成,实现电机的电流速度位置三闭环的实时控制,拥有计算机监控界面,能在线调节控制参数和保存采集的数据。代码开源,支持二次开发。
产品特点
工业级产品
开源成熟工业机械臂产品为实验载体,支持多种教学实验及科研领实验
开源开放
伺服驱动器提供开放电流、速度、位置三环控制,支撑高级动力学算法研究和开发
控制周期短
控制器采用CSPACE进行开发,控制周期<1ms
功能丰富
具有参数辨识、柔顺控制、零力拖动示教、碰撞保护检测等功能
案例丰富
丰富的机械臂运动学、动力学控制案例,快速掌握机械臂控制系统技术以及
拉格朗日模型、PID、自适应控制、带摩擦力和重力补偿等动力学实验。
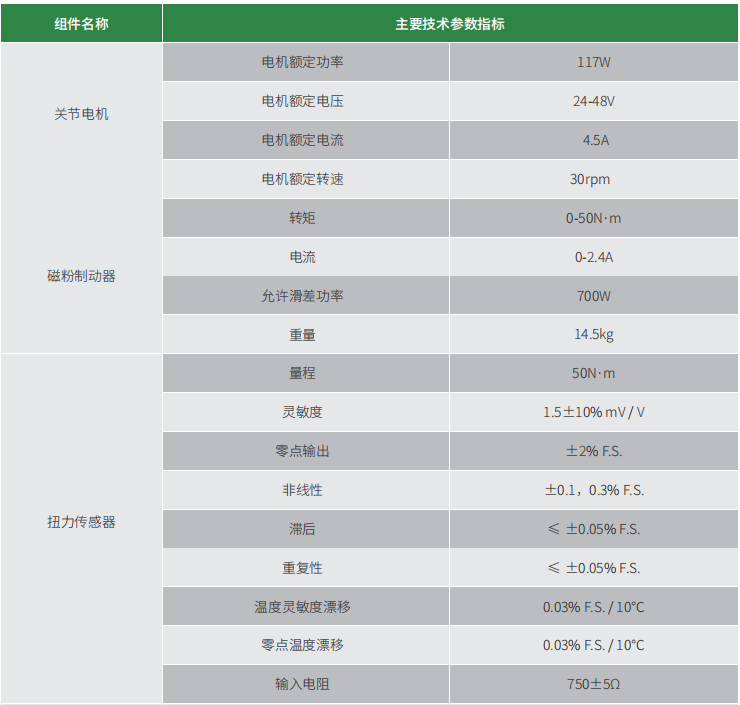
性能指标
应用专业
自动化专业、电气工程及其自动化专业、机械设计制造及自动化专业、机器人工程专业、智能科学与技术专业、人工智能工程专业中
支持课程
电机学、电机拖动与控制、电力电子技术、MATLAB建模与仿真、伺服电机与驱动技术、电机及电力拖动基础、单片机原理及应用
支撑科研
电机参数自动辨识、负载惯量识别、S型曲线速度规划、PI参数自动整定
鲁棒控制、模型预测控制、自适应鲁棒控制、自抗扰控制
案例应用举例
实验室建设
1. 实验室建设功能
该实验室可以作为自动化专业、机器人工程专业、电气工程及其自动化专业、机械电子工程专业、智能制造工程专业的《电机学》、《电机拖动与控制》、《伺服控制技术》、《运动控制系统》等课程的相关实验平台,能够完成电机驱动控制仿真、信号采集、PWM产生、坐标变换和FOC磁场定向控制、恒压频比调速、电流环、速度环和位置环等实验内容。
2. 实验室建设效果图

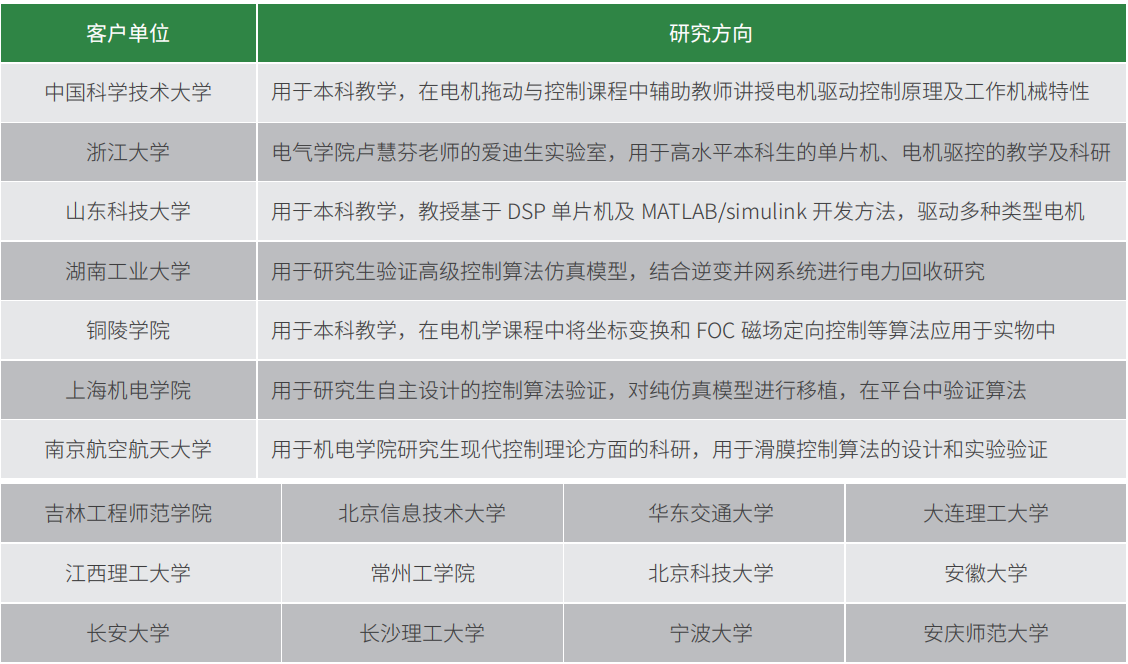
3. 实验室建设案例
目前已有中国科学技术大学、浙江大学、西南石油大学、山东科技大学、湖南工业大学、南京航空航天大学、安徽大学、宁波大学、合肥工业大学、长沙理工大学、北京信息技术大学、华东交通大学、北京科技大学、长安大学、大连理工大学、安庆师范大学、上海机电学院、淮南师范学院等高校使用上述设备建立伺服驱动实验室。


版权所有 中科深谷科技发展有限公司 皖ICP备17007209号备案
免责声明 技术支持:网新科技(www.ibw.cn)