
开源自平衡自行车
2023-08-11
产品概述
为更好地赋能欠驱动系统的研究和产业化,公司推出自主研发的开源自平衡自行车系统,核心运动控制系统和伺服驱动器全自主开发,为教学和科研提供优越的开放性支撑。开源自平衡自行车系统是基于CSPACE控制系统和MATLAB/Simulink开发的教科研平台,由自行车本体、控制系统、驱动器系统、上位机软件和电源系统组成。
该系统控制算法源代码开源,提供丰富的运动学、动力学控制实验以及伺服电机控制实验案例,如运动学实验、欠驱动系统自平衡控制实验、转向平衡控制实验、室内导航自主运动控制实验。该系统既可以作为自动化专业、机器人专业、机械电子专业、智能制造专业、机械工程专业中相关如《机器人学导论》、《机器人控制技术》、《计算机控制技术》、《电机与伺服控制》、《机器人伺服驱动技术》、《机器人机电一体化技术》、《机器人操作系统》 等课程的配套实验实践平台,又可以作为相关专业和课程的运动学、动力学及伺服驱动算法的科研平台。

产品特点
1、开源成熟平衡自行车产品为实验载体,支撑机器人建模仿真、机器人学、机器人控制、机器人动力学等教学实验,以及科研领域的算法验证实验等。
2、控制器采用CSPACE进行开发,硬件平台基于TI DSP28335,外设接口丰富,运算速度快,采用Matlab/Simulink软件进行编程,可以更好更快地研究高级自动控制算法。
3、提供丰富的案例,方便地掌握欠驱动控制系统的技术,进行更深入的研究。
4、提供丰富的应用场景:高精度定位与导航,基于视觉的自动跟随等。
系统平台组成

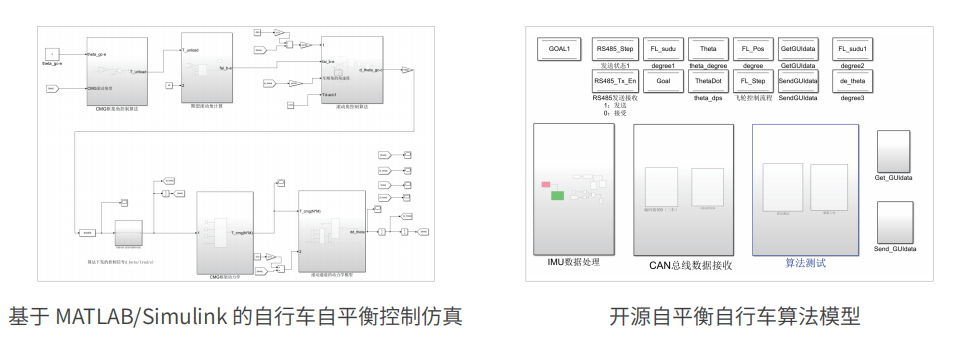
开源自平衡控制系统主要部件和连接关系如图2所示,分为控制系统和执行系统两部分。控制系统由主控计算机和实时控制器两部分组成。自平衡控制程序在Matlab/Simulink中编写、编译和调试,在控制器中执行。上位机和控制器之间通过串口总线连接。执行系统主要由自行车本体,自主研发的伺服电机和配套的电气部件构成。
1、CSPACE控制器
CSPACE控制与半实物仿真系统是基于TMS320F28335 DSP和MATLAB/Simulink开发,拥有AD、DA、IO、Encoder、PWM、CAN、SPI等丰富的硬件外设接口,以及一套功能强大的监控软件。结合计算机仿真和嵌入式实时控制技术,能实现硬件在回路(HIL)和快速控制原型(RCP)设计的功能,也是基于模型设计(MBD:Model-Based Design)典型的产品。CSPACE控制器如图3所示,控制器参数如表2所示。是可对标国际先进的控制与半实物仿真领域的产品。


用户界面软件能实现多路数据采集和灵活在线调参,如可以采集自行车倾角传感器数据,在控制器的Simulink程序中进行设定显示的变量,并进行波形显示。可以控制自平衡自行车实现静止平衡。
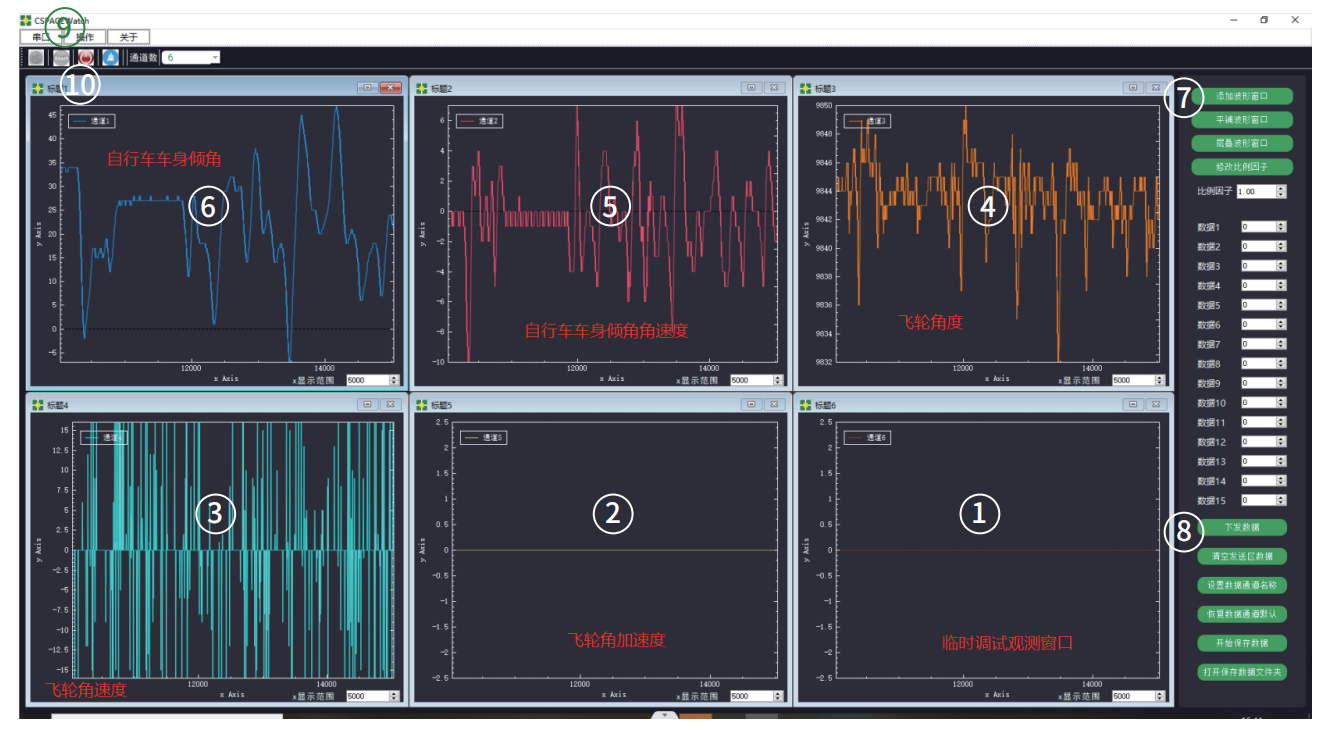
1 -6 观测点变量显示模块
7 变量在线修改模块
8 下载参数按钮
9 串口选择
10 启动和停止点击按钮。
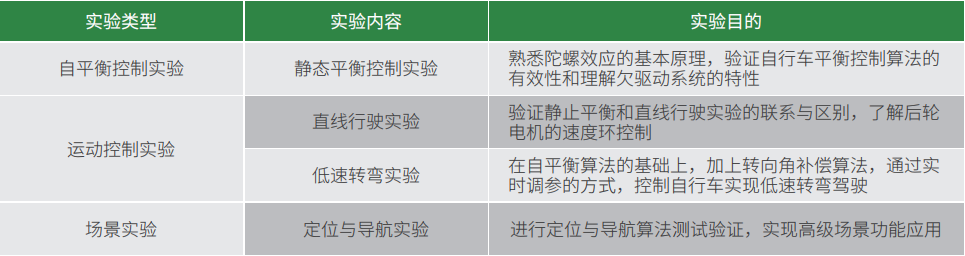
下列实验内容为可以在本平台完成的所有实验,实验程序均在Matlab/Simulink软件中编写,所有程序源代码均开放,可以自由修改,实验均配有演示视频。
课程教材与科研方向本科和研究生教学课程
1、机器人学
2、机器人建模与仿真
3、自动控制原理
4、机器人操作系统计算机控制技术
支撑科研方向
1、高级平衡控制算法理论研究
2、路径规划和轨迹规划
3、自动驾驶与车路协同
4、面向无人驾驶的多机协同控制
5、高精度定位与自动导航
典型教材推荐
《机器人学导论(第四版)》 美国斯坦福大学 John.J.Craig 教授
《机器人控制技术》 陈万米,上海大学教授,博士
《计算机控制技术(第四版)》顾德英,东北大学,教授,硕导
《机器人技术基础》 熊有伦 华中科技大学 教授博导,科学院院士
《MATLAB建模与仿真》 哈尔滨理工大学 副教授,硕导
基础实验演示视频
实验1、自平衡自行车静止平衡控制实验
实验2、自平衡自行车转向控制实验
实验3、自行车室内导航实验

版权所有 中科深谷科技发展有限公司 皖ICP备17007209号备案
免责声明 技术支持:网新科技(www.ibw.cn)