
多传感器融合开源移动机器人
2023-09-06
产品概述
平台是由移动底盘本体、控制系统、传感器系统等组成。底盛内置 ROS 和 MATLAB/Simulink 搭建的控制框架,采用差速控制模型,由基于 DSP 系列芯片自主开发的电机驱动器及轮毂电机作为动力来源。底盘本体安装有防碰撞传感器、20 激光雷达、九轴姿态传感器、深度相机。
控制系统由英特尔工控机提供高效的算力保障,结合车体显示器,键鼠套装,遥控手柄,可方便车体控制与调试,算法验证。采用 DC24V 15Ah 可保障车体4个小时的充足续航。平台支撑 MBD 开发方法,打通平台底层驱动搭建、算法部署、仿真测试和功能样机实地测试四大环节,为教学和科研提供优越的开放性支撑。

产品特点
1. 支撑机器人建模仿真、机器人操作系统、传感器、机器人学、机器人控制以及科研领域的视觉算法验证实验和导航控制算法实验等。
2. 车体采用模块化设计,易于安装,人机交互友好,使用便捷。
3. 控制系统采用MATLAB/Simulink软件进行编程,用户可以更好更便捷地研究控制算法,并可支撑更高级的控制算法验证。
4. 提供多传感器感知周围环境,2D激光、深度相机、超声波等。
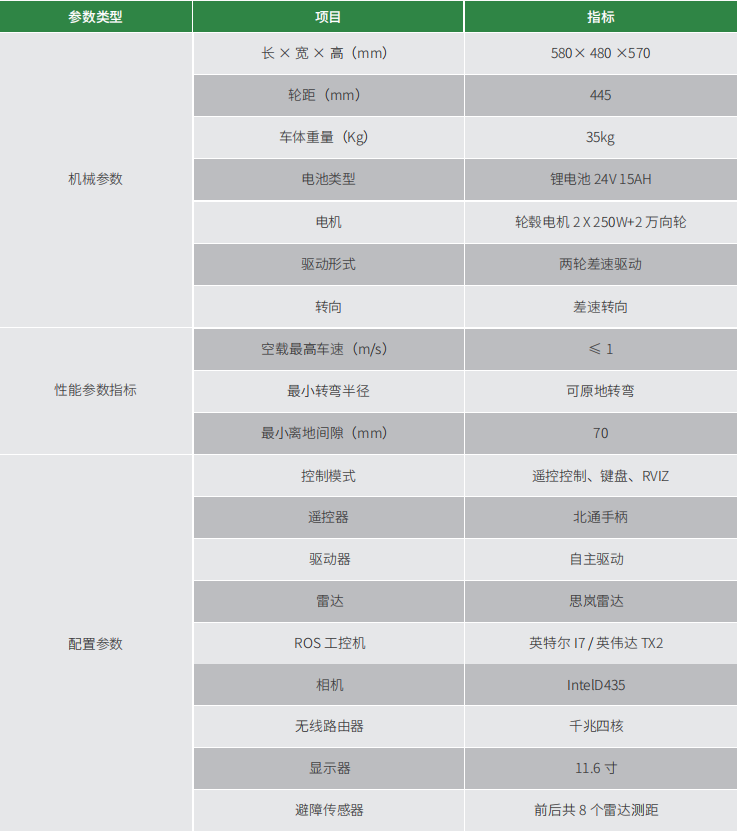
参数指标

版权所有 中科深谷科技发展有限公司 皖ICP备17007209号备案
免责声明 技术支持:网新科技(www.ibw.cn)