
四轮驱动四轮转向移动机器人
2023-09-06
产品概述
底盘结构小巧,内部空间大,载重能力强,转向灵活,能实现原地转弯、任意方向的楔形行驶、极小转弯半径的阿克曼转向;带悬架的设计,能适应更多的路面;采用四驱的设计,动力和越野能力强;四轮独立转向的设计,运动灵活,轨迹跟踪精度高,可扩展机械臂形成移动机械臂产品,也可以支持ROS、导航、视觉、北斗、5G系统进行二次开发应用。

产品特点
机械结构
1. 带编码器的轮毂伺服电机进行驱动,低速性能好,运行平稳,精度更高,结构紧凑;
2. 每个轴带转向伺服电机,采用蜗轮蜗杆减速机,带自锁功能,伺服电机采用多圈绝对值编码器,整车电池断电仍能记录每个轴的转向角;
3. 带悬架设计,抗振能力强,适合更复杂的路面;
4. 通过楔形运动,可以实现任意方向的运动;可以实现原地转弯;载重能力强,阿克曼转向转弯半径小;
5. 在底盘顶部提供了标准型材固定支架和安装板,可以定制不同构件,实现舱体与底盘的完全分离,可演变成多种类型的移动机器人。
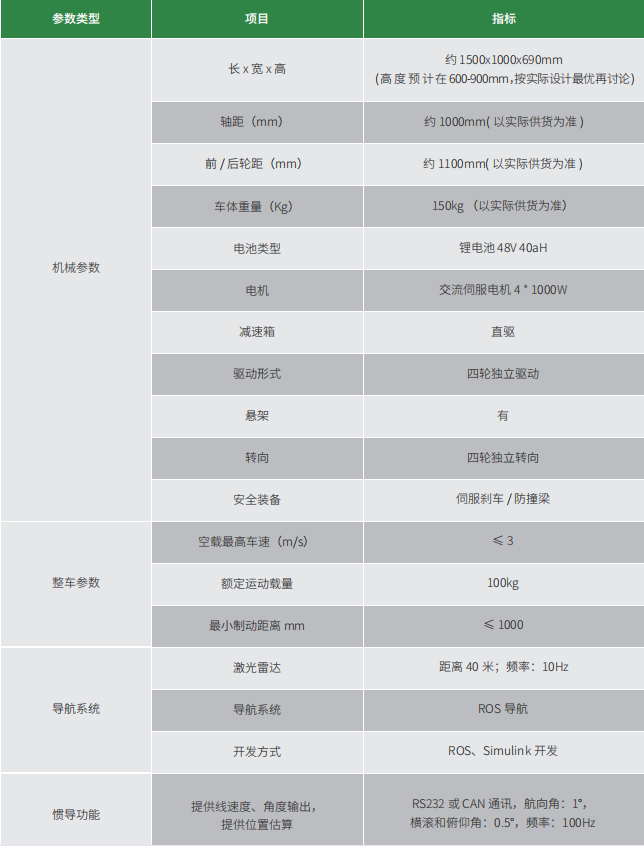
参数指标
应用专业
车辆工程
机器人专业
机械电子专业
机械工程专业
自动化专业
人工智能专业
智能制造专业
应用课程
《移动机器人技术》
《机器人控制技术》
《计算机控制技术》
《电机与伺服控制》
《机电一体化技术》
《ROS机器人操作系统》
《运动控制系统》
《MATLAB建模与仿真》
《DSP原理与应用》
《机器人视觉》
支撑科研方向
1. 伺服驱动技术与算法
2. 机器人控制系统设计
3. 机器人视觉伺服设计、避障与路径规划
4. 移动底盘设计
5. 激光定位导航、路径规划、避障检测
6. 图像处理
7. 人脸识别
8. 特征识别
9. 目标分类与目标检测
10. 激光建图定位、导航、路径规划、避障检测
11. 姿态解算、滤波算法
12. 远程控制与信息传输、信息融合
13. 深度学习(可选配)
场景应用


版权所有 中科深谷科技发展有限公司 皖ICP备17007209号备案
免责声明 技术支持:网新科技(www.ibw.cn)