
开源视觉 SLAM 定位导航模块
2023-09-06
产品概述
开源视觉 SLAM 定位导航模块主要由摄像头、硬件算力平台和开源软件系统等组成。其摄像头选用双目相机,硬件算力平 台基于英特尔/英伟达工控机开发,开源软件系统包括 orb_slam2 和 move_base,可运行于 Ubuntu16.04 及以上环境。 该开源模块支持多种场景下的同步定位与建图、离线定位、视觉导航等应用,可结合不同的机器人底盘组建具备开源视觉 导航功能的移动类机器人,方便二次开发应用。

产品特点
1. 支持视觉地图保存和加载。
2. 二进制字典文件,支持快速启动。
3. 基于 ROS 系统,方便与其他机器人模块集成。
4. 使用 rviz 实现可视化。
5. 代码全部开源,支持二次开发。
应用案例
支撑科研方向
1. 视觉建图定位、导航、路径规划、避障检测研究
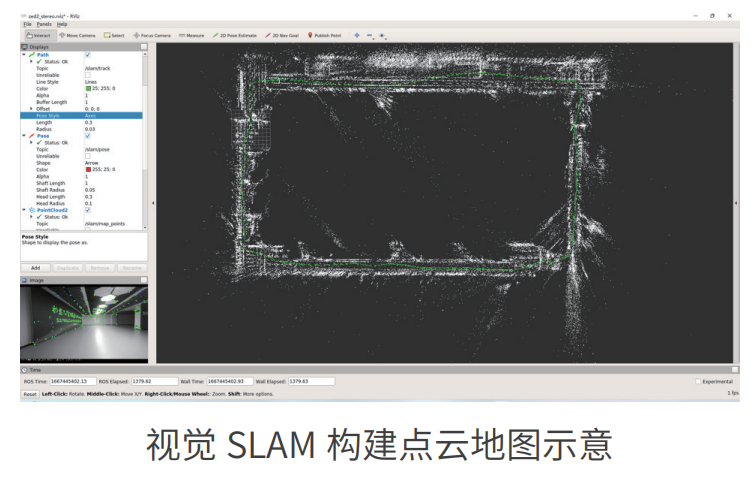
2. 视觉 SLAM 前端里程计功能设计研究
3. 视觉 SLAM 后端图优化功能设计研究
4. 视觉 SLAM 闭环检测功能设计研究
支持实验内容

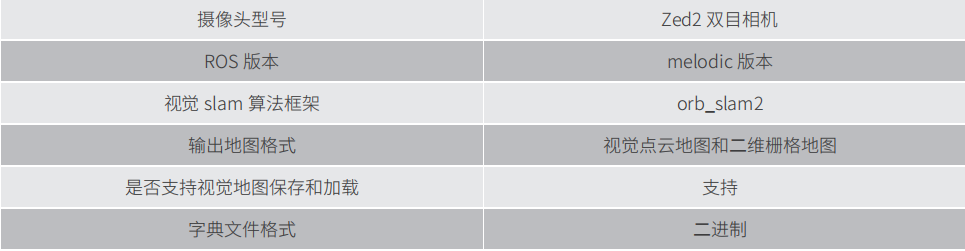
参数指标

版权所有 中科深谷科技发展有限公司 皖ICP备17007209号备案
免责声明 技术支持:网新科技(www.ibw.cn)