
开源智能双臂人机协作机器人
2021-04-22
在新一代信息技术、人工智能、先进制造技术等新技术革新浪潮推动下,智能制造技术和行业正发生重大变革。人机协作、人机共融成为市场主流趋势,双臂人机协作机器人模拟人类肢体动作,在大幅提升空间利用率的同时,又能完美契合消费电子等行业对装配灵活敏捷的生产需求,作业范围相对较广,可适应相对复杂的工作场景和产业应用,具有广阔的市场潜力。
支持科研方向
双臂协作机器人动力学建模与控制;
双臂协作机器人力控制;
双臂协作机器人人机交互;
双臂协作机器人基于视觉的控制;
双臂协作机器人运动与路径规划;
基于深度学习的双臂协作机器人动力学控制。
产品概述

开源智能双臂人机协作机器人
开源智能双臂人机协作机器人平台由两台开源六轴协作机械臂、一套3D视觉系统、两套六维力传感器、两套机械夹爪和机器人控制系统组成,具有开源、智能、安全、易用等显著特点,是实现特殊机器人应用场景和科研开发的理想选择。
产品特点:
具有强大的算法库:自主研发的开源智能机器人控制系统,集合了机器视觉、智能力控、运动学、动力学以及机器学习等算法,采用ROS控制系统对视觉、夹爪、机械臂、力传感器进行联调控制,并全部开源;
协作机械臂的控制系统全部开源,伺服驱动器是自主研发,提供正逆运动学、笛卡尔空间和关节空间的轨迹规划、重力补偿、零力拖动示教、柔顺控制(力位混合控制、阻抗控制)等运动学、动力学等算法实验案例;
提供3D视觉开源算法,包括图像处理基础知识和实验,边沿、线段、轮廓检测,支持向量机SVM、最近邻分类算法KNN机器学习算法,机械臂和视觉系统的手眼标定,视觉抓取,双臂视觉标定和作业等实验;
完善的系统开放性及定制能力,丰富的软硬件接口,支持EtherCAT、CAN、Ethernet等多种通讯方式采用研究人员自主的控制系统进行控制,也可以用系统自带的Simulink和ROS进行系统的开发;
提供丰富的应用场景:单臂操作,双臂协同,柔性控制,力控装配,智能示教等特点;
支持多传感器融合,支持智能语音控制、智能图像识别控制、5G远程图传、远程控制等应用扩展。
控制系统和算法框图
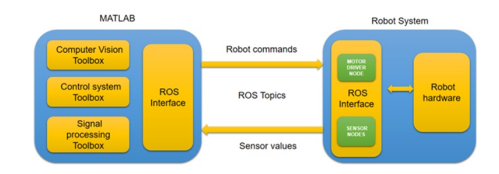
双臂协作机器人Simulink/ROS软件仿真图

界面软件(机械臂控制、循环运动、数据采集显示)

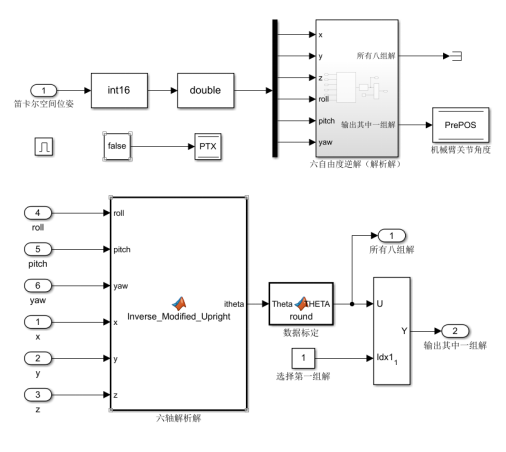
运动学逆解Simulink控制框图

版权所有 中科深谷科技发展有限公司 皖ICP备17007209号备案
免责声明 技术支持:网新科技(www.ibw.cn)