
倒立摆智能控制实验室
2021-04-22
倒立摆控制系统是一个复杂的、不稳定的、非线性系统,是进行控制理论教学及开展各种控制实验的理想实验平台。对倒立摆系统的研究能有效的反映控制中的许多典型问题:如非线性问题、鲁棒性问题、镇定问题、随动问题以及跟踪问题等。通过对倒立摆的控制,用来检验新的控制方法是否有较强的处理非线性和不稳定性问题的能力。同时,其控制方法在军工、航天、机器人和一般工业过程领域中都有着广泛的用途,如机器人行走过程中的平衡控制、火箭发射中的垂直度控制和卫星飞行中的姿态控制等。
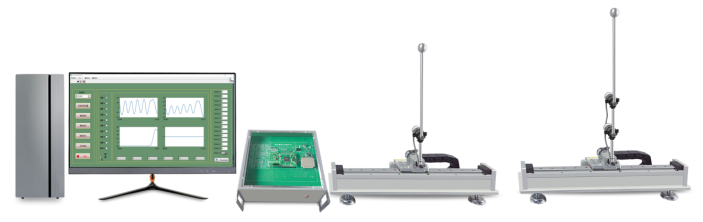
开源倒立摆实验室,给学生一个对自动控制的感性认识,增加学习自动控制的兴趣。倒立摆实验系统涉及到TI TMS320F2812 DSP、嵌入式系统、电子电路、电机、常用传感器、MATLAB、计算机监控界面、动力学、自动控制等众多知识,学生既可借此学习相关知识,又可做相应的项目开发,提高动手能力和开发能力,研究人员还可以检验新型的动力学模型和控制算法写论文,促进科研成果的形成,通过这个复杂的控制系统的性能展示和研究,能充分掌握电控系统的设计方法。



版权所有 中科深谷科技发展有限公司 皖ICP备17007209号备案
免责声明 技术支持:网新科技(www.ibw.cn)