

高博会第二天|中科深谷“开源机器人+”沉浸式展区,火热体验中。
发布日期:2020-11-09 浏览次数:2721
2020第55届中国高等教育博览会,正在长沙国际会展中心如火如荼地举行。中科深谷在展会首日人气爆棚,吸引了大批高校教师驻足观看。
展会第二天 ,观众热情有增无减,昨天展位盛况还未走远,今天又绽放出别样的精彩。
中科深谷“开源机器人+”展区,开源机器人沉浸式体验仍在继续。
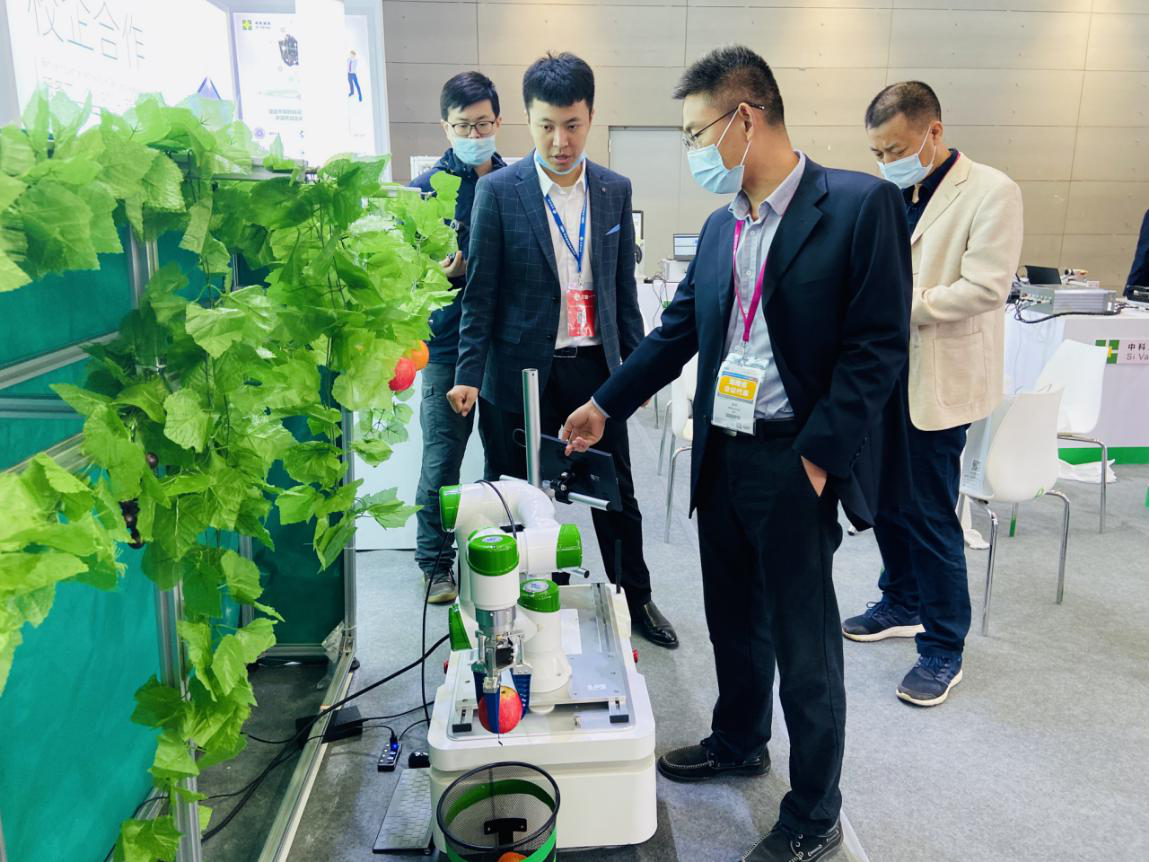
最吸睛·移动抓取开源机器人
中科深谷移动抓取开源机器人作为本次展会最吸睛的产品,采用ROS激光雷达,建立地图;北斗导航、避障、路径规划;提供开源2D 3D视觉抓取软件和算法;支持图像识别、目标检测和定位、智能语音等。

(基于视觉移动抓取机器人现场演示)
展会期间中科深谷不间断演示移动抓取机器人水果抓取,从底盘的导航定位、机械臂的路径规划,到夹爪的抓取姿态,利用深度学习算做到精准识别,自动抓取,为高校师生提供机器人抓取的实际工程案例。
(移动抓取机器人现场功能演示)
最受欢迎·两轮智能平衡车
两轮平衡小车集群控制系统,具有强大的自平衡稳定功能。在手动触碰、人为障碍等不同干扰情景下,通过超声波模块,探测前方障碍距离,实现跟随或躲避姿态。

老师在日常教学中可将PRD自动控制原理算法,视觉扩展应用、视觉识别等技术在两轮智能车上进行验证,助力学生参加机器人竞赛,提高编程能力,将理论应用实践,提高项目工程解决能力。

(两轮平衡车现场演示)
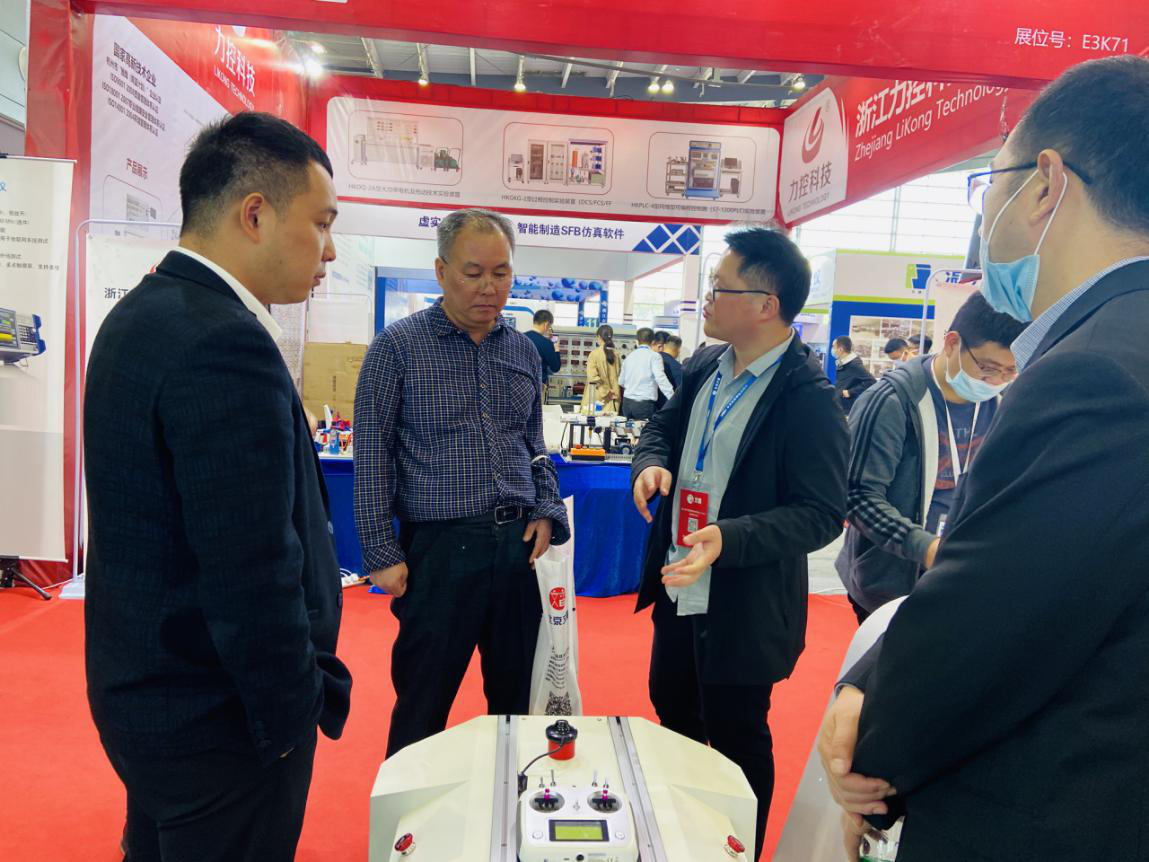
最同步·移动抓取作业机器人平台
机器人通过视觉传感器获取作业环境和作业对象的空间坐标及位姿信息然后,对机器人进行视觉标定、机械臂目标点规划路径,实现以目标为导向的机器人自适应抓取通过主电台将控制指令下发到接收端实现一对N同步控制。

可供高校师生多机器人定位、导航、路径规划、协作控制等方向研究。

(多机器人同步控制演示现场)
最亲切·图书馆智能机器人
将物联网,云计算等核心智能技术与图书馆传统服务相结合,将资源、服务、馆员和用户有效的集成在一起的智慧图书馆管理员。人脸识别、主动迎宾、主动服务,海量知识问答,支持大量级数据自动机器自动学习。

最灵活· 四轮驱动四轮转向移动机器人
四轮驱动四轮转向(4WD-4WS)移动机器人采用带编码器的轮毂伺服电机、带蜗轮蜗杆减速器和多圈绝对值编码器的伺服电 机驱动,能实现原地转弯、任意方向的楔形行驶、阿克曼转弯的功能,带悬架设计,运动灵活、零转弯半径、平稳、越野能力强、 轨迹跟踪精度高(尤其适合自动驾驶),可以通过CAN和RS232接口实现底盘的控制,提供航模遥控器的遥控功能和无线串口的 监控软件监控功能。底盘结构小巧,内部空间大,载重能力强,转向灵活,几乎集成了各种底盘的优点于一体。可扩展机械臂形成 移动机械臂产品,也可以支持ROS、导航系统进行二次开发应用。

在使用场景上,规避了如差速底盘滑动摩擦力过大和阿克曼底盘转弯半径过大等特点下的一种新型底盘的研究方向。
(四轮驱动四轮转向移动机器人现场演示)
最敬业·七轴臂
开源七轴协作机械臂系统,是为了适应日益复杂的工业环境应用,真实还原人类手臂,最新推出的一款开 源机械臂系统。该系统由七轴机械臂本体、控制系统、上位机软件和稳压电源组成。每个机械臂关节由谐波减速机、力矩电机、 高精度绝对值编码器、高精度增量式光电编码器和伺服驱动器组成。控制系统是基于AM335x RT-Linux设计。

机械臂系统使用完 全自主研发的关节驱动器及运动控制器,为教学和科研提供优越的开放性支撑。
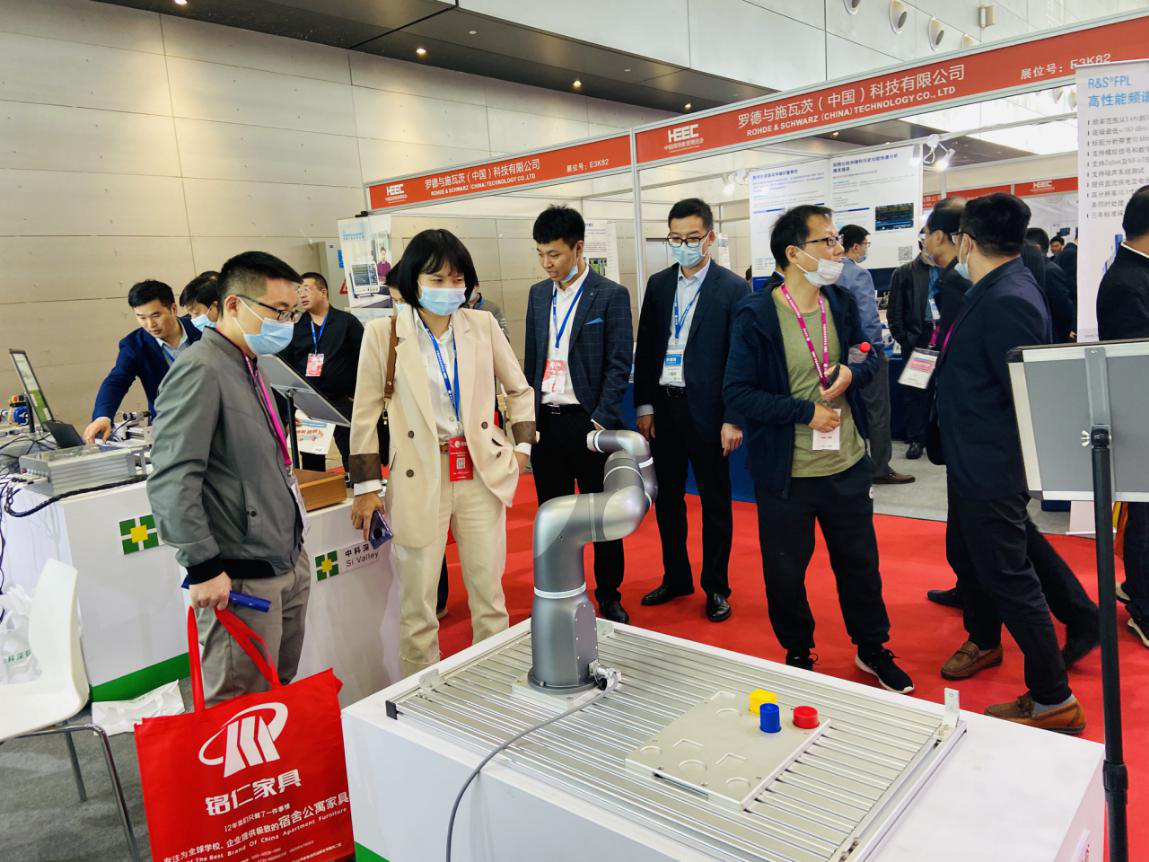
(开源七轴协作机械臂系统现场演示)
最贴心·中科深谷团队
现场,中科深谷团队热情接待,为来往嘉宾提供了从产品讲解到演示到具体的实验指导等全流程服务。

(中科深谷团队热情接待客户)
在产品介绍过程中,从老师们的日常教学实际应用出发,结合开源机器人+独特优势,为老师进行产品动态演示。
(倒立摆动态展示)

(人形机器人动态展示)

(多电机平台动态展示)


