


- 深谷荣誉 | 获评安徽省 A 级“守合同重信用”企业
- 2025-12-18
- 近日,安徽省“守合同重信用”企业公示名单正式发布,中科深谷凭借在诚信经营、规范管理和合同履约方面的稳健表现,获评 2025 年度安徽省A级“守合同重信用”企...
- 查看详情 >

- 深谷智脑系统(BrainCspace)赋以机器人智力,服务行业应用智能化升级
- 2025-12-17
- 随着具身智能浪潮的深入进化,智能机器人如何更高效地解决实际场景问题,已成为推动行业智能化升级的核心问题。 中科深谷科技源自中国...
- 查看详情 >
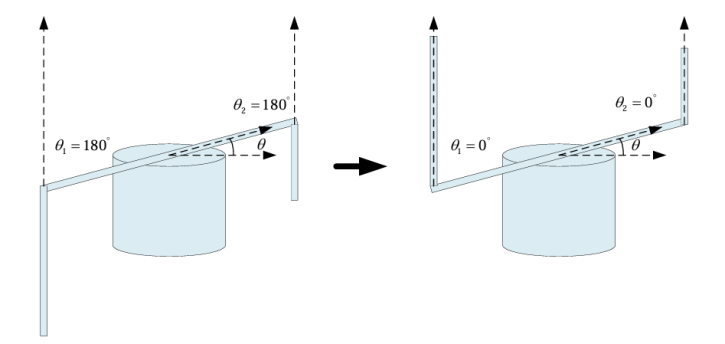
- 深谷技术 | 双摆自起摆稳摆控制策略详解
- 2025-12-09
- 针对一阶并联旋转双倒立摆系统,其起摆策略主要分为两种:并行起摆和串行起摆。这两种方法均基于能量控制原理设计,但其实现方式有所不同。串行起摆通过依次减少两个摆杆...
- 查看详情 >

- 深谷技术 | 基于FoundationPose模型的6D姿态检测方法
- 2025-12-08
- 6D姿态检测(6D Pose Estimation)旨在通过输入物体的各方位图像、点云数据或CAD模型文件,精确预测目标物体在三维空间中的旋转(3D旋转矩阵)...
- 查看详情 >

- 深谷具身智能新品|面向运动科学与康养应用的智能足底数据采集平台
- 2025-12-03
- 中科深谷基于深谷智脑系统 ,采用多维力传感器技术及自研步态识别算法,推出智能足底数据采集平台。该平台能够实时动态捕捉足底受力变化,结合数字孪生平台,为科研和工...
- 查看详情 >


