

室外重载驱控一体底盘
发布日期:2021-04-30 浏览次数:3861
概述
采用驱控一体化底盘平台,配合导航系统,外扩设备,构成智能移动应用实验平台。车体系统由平台控制系统、数据采集系统、视觉采集系统组成。采用开源的ROS系统配合开源SLAM算法,完成室内建图、定位、自动避障、路径规划,通过搭配5G通信系统、北斗定位系统,可满足室外无人化作业的需求。
平台控制系统作为整车的大脑,通过数据采集系统将外部传感器的数据采集到平台控制系统上,移动控制模块控制轮毂伺服电机,电源管理模块控制整车的电源部分,外部扩展模块控制车体的灯光组件和显示组件,平台可以通过选配组件任意搭配,预留多种传感器接口,开源接口协议,方便各类院校,企业从事科研和产品的二次开发;客户仅需根据自身设计需求,添加相关传感器及其他外扩设备,即可开发出具有自主定位导航功能,满足设计场景的智能应用机器人。

产品特点
❖ 驱控一体化移动底盘,可以支持深度学习及机器学习应用部署
❖ ROS架构,支持C++、Python、Matlab/Simulink联合开发
❖ 支持Matlab/Simulink与GAZEBO,ROS与GAZEBO等多种仿真模式
❖ 采用大动力、四驱、高悬架结构,有效负载大,适应室外多地形环境
❖ 可以自由搭配多种类的外设,并有多种外设型号可选
❖ 通过认证的大功率工业驱动器和电机,运行平稳,有效载荷大
❖ 实验案例内容丰富详细,包含大篇幅的技术及知识点介绍
❖ 资料完全开放,支持二次开发,提供二次开发技术支撑
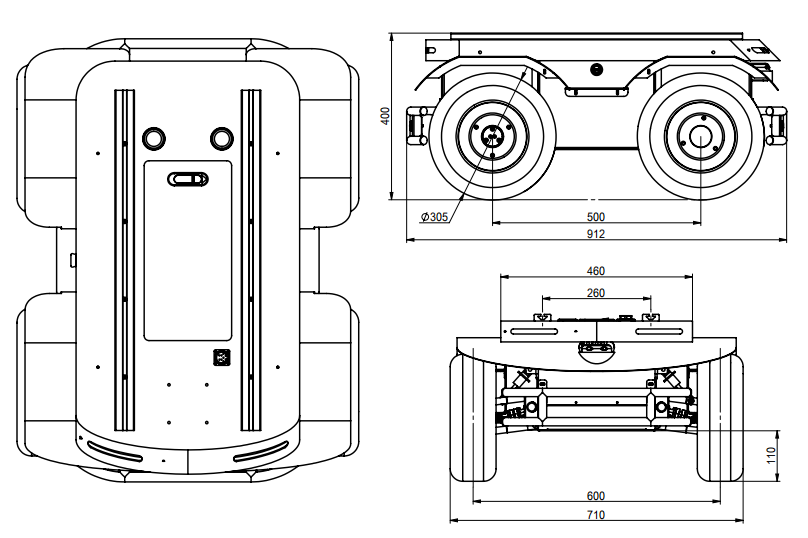
规格尺寸
产品应用
移动底盘作为一款通用型机器人开发实验平台,应用场景非常广泛,可以通过搭载定位系统、通信系统、传感器采集系统,在厂区、仓库,农场等场景下自主移动并智能规划路线,无需外部环境调整及人为编程设置,简单易操作,广泛应用在农业采摘、安防巡检、危险作业等机器人领域。

技术领域

开发概图

Matlab/Simulink模型设计
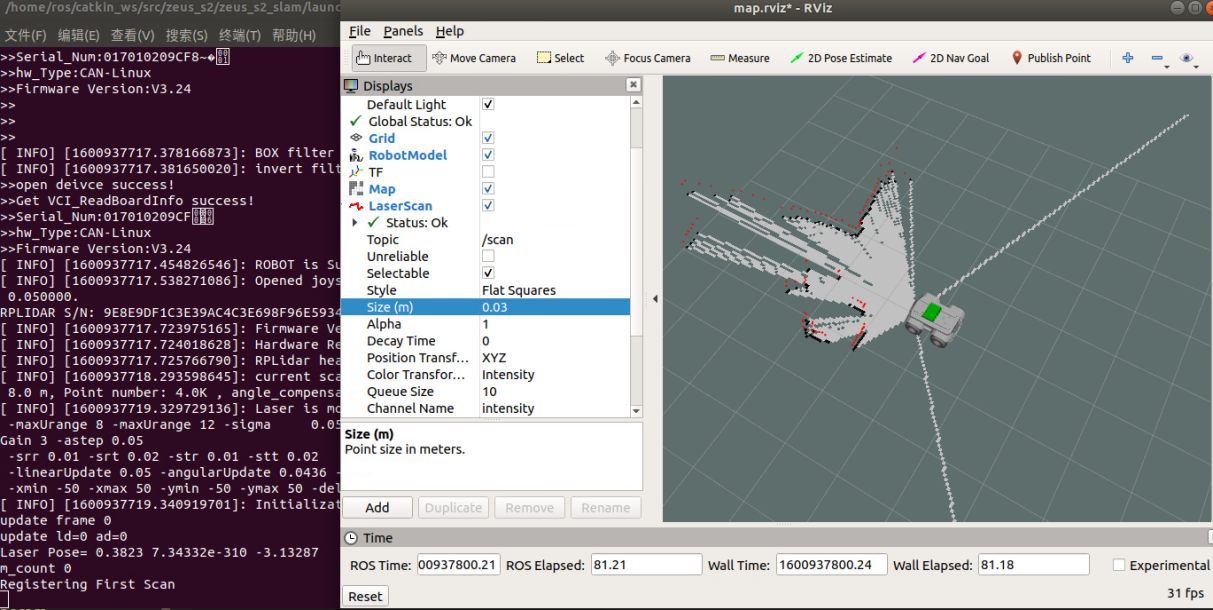
ROS下的SLAM定位导航
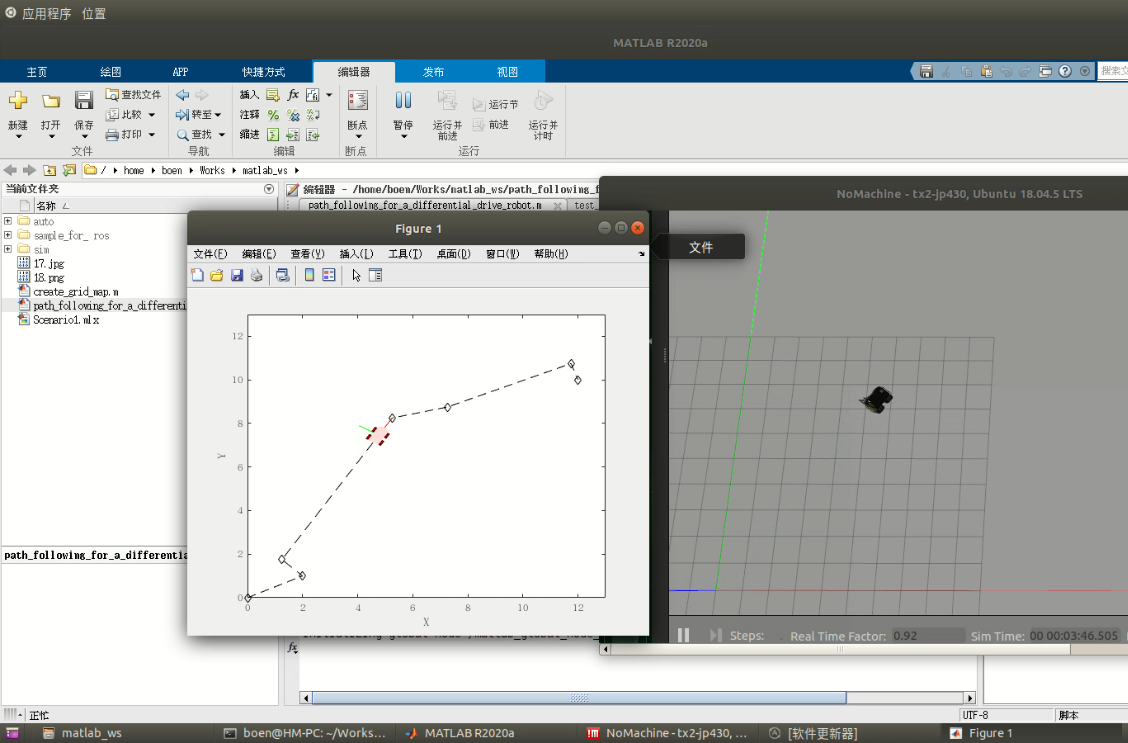
Matlab/Simulink与GAZEBO联合仿真
性能指标
(1)长×宽×高(mm):912×710×400
(2)轴距(mm):500
(3)前/后轮距(mm):600/600
(4)整备质量(Kg):70-75(搭载的设备重量根据实际情况定)
(5)有效载荷(Kg):直线150Kg,转弯小于100Kg
(6)最大行驶距离(Km):60(客户可以自行升级电池,提高续航里程)
(7)电池:锂电池组,48V,36Ah;充电时间:7-7.5h(5A充电器)
(8)电机:轮毂伺服电机4×0.5Kw
(9)驱动形式:四轮独立驱动
(10)悬架:四轮独立悬架
(11)最高车速(Km/h):3.6
(12)最小转弯半径(m):0 (负载小于50Kg情况下)
(13)坡度角度 ≤ 30°
(14)最小离地间隙(满载)127mm
(15)最小制动距离:0.2m(车速3.6Km/h)
(16)控制模式:导航模式和遥控模式
(17)遥控器:2.4G/距离10m(可选)
(18)底盘通讯接口:USB接口/网口
(19)环境温度范围:+5℃-50℃(湿度10-95%,无压缩冷凝)
(20)激光雷达:1个
(21)超声波传感器:前后各安装2组
- 上一篇:履带式作业复合机器人
- 下一篇:四轮驱动四轮转向移动机器人


