

CSPACE - RT实时操作系统版
发布日期:2021-06-05 浏览次数:4559
概述
为助力企业和科研院所开发功能样机、缩短产品研发周期、加速成果产出,公司推出自主研发的CSPACE控制与半实物仿真系统。该产品基于ARM Cortex-A9、实时Linux和MATLAB/Simulink开发,拥有AD、DA、IO、Encoder、PWM、CAN、SPI等丰富的硬件外设接口,包含一套功能强大的监控软件。该产品结合计算机仿真和嵌入式实时控制技术,能实现硬件在回路(HIL)和较快速控制原型(RCP)设计的功能,是基于模型设计(MBD:Model-Based Design)典型的产品,是国内可对标国际控制与仿真产品的本土化较快速控制原型与半实物仿真系统。
该平台有以下几大特色:
1、支持RCP较快速原型设计,实现用户仿真模型到嵌入式控制原型的自动转换,将用户从复杂的嵌入式开发中解脱出来,帮助用户把精力集中到算法仿真的设计实现与验证上来。
2、支持HIL硬件在回路测试,加速产品原型设计开发速度,缩短设计和验证周期,降低用户开发测试成本,并提升产品性能和稳定性。
3、采用实时Linux操作系统,方便大数据量、多任务的处理,方便使用linux丰富的系统资源,如管理与应用进程、线程、任务、队列、内存、文件等。
4、有EtherCAT主站协议,支持现在通用的较高实时性的EtherCAT驱动器,满足用户对高动态性能的控制需求,该主站协议不需要额外付费节省用户的成本。
5、有Ethernet接口,可以采集该类型接口的传感器等设备,如视觉、激光测距、机械臂等,满足用户多种应用需求。
6、IO资源支持广泛,拥有AD、IO、CAN、RS232、RS485、Camera视觉、USB Host等接口,满足不同领域及行业客户的差异化需求。
7、提供功能强的上位机软件,支持多达30组以上的控制参数的下发,支持多达18通道的数据显示、保存,方便处理数据。
8、可广泛应用于汽车工业、航空航天和工业自动化、机器人控制、机电一体化控制、新能源、图像视觉、军工等领域。
开发流程
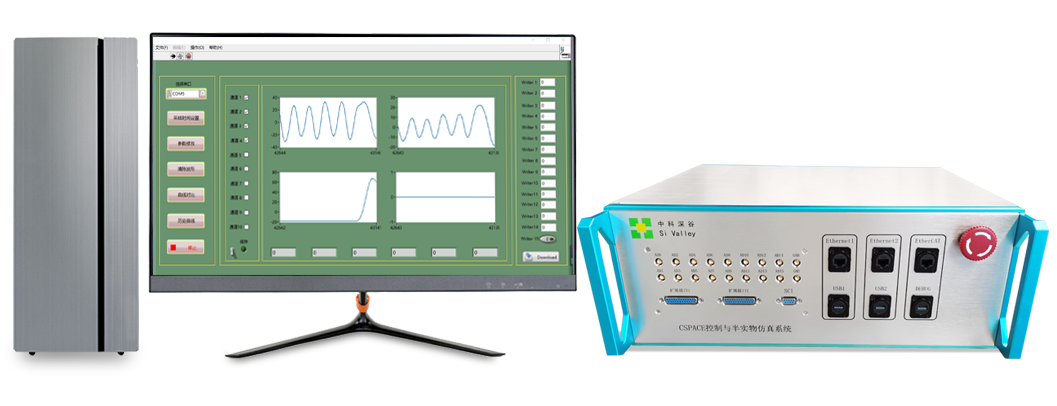
CSPACE控制与半实物仿真系统主要主控计算机、实时控制器(CSPACE)、监控上位机、被控对象4部分组成。
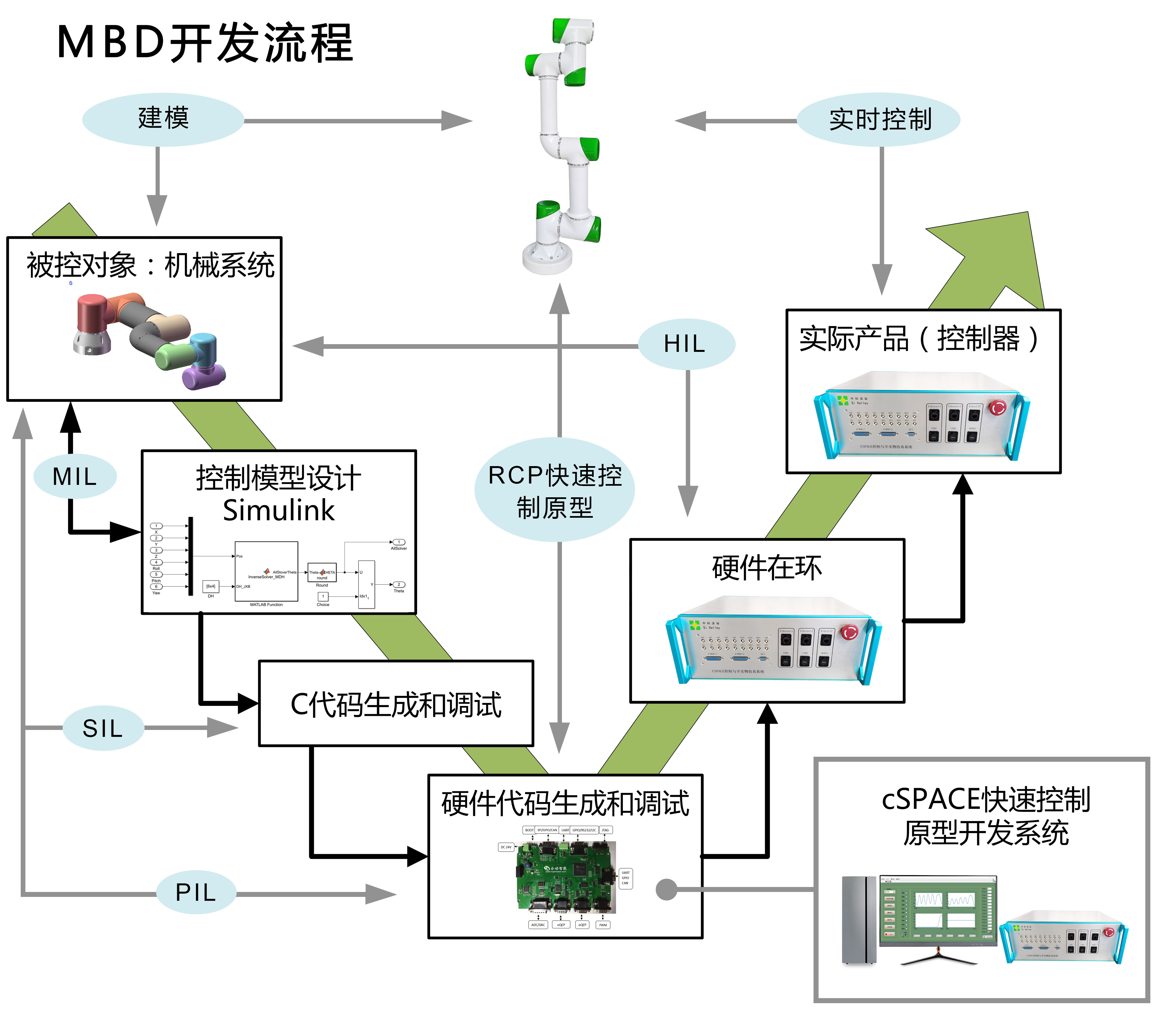
本公司CSPACE产品采用基于模型设计的方法,该方法与传统开发工作流程的两个主要区别:
1、将工作流程中大量费时或易出错的步骤(如代码生成)自动化。
2、从需求捕获到设计、实现和测试,系统模型始终占据开发流程的核心。
在开发过程中,MIL主要用于测试算法,SIL和PIL主要用来测试代码来保持代码与模型的一致性,PIL主要用来测试控制器。
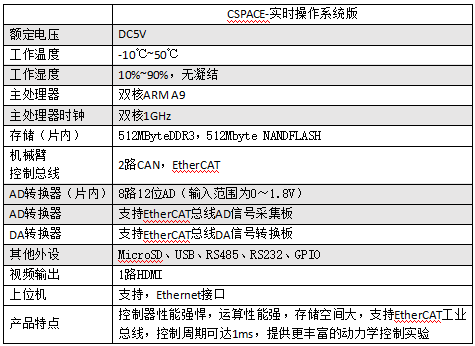
CSPACE控制器参数
表1 CSPACE控制器技术参数
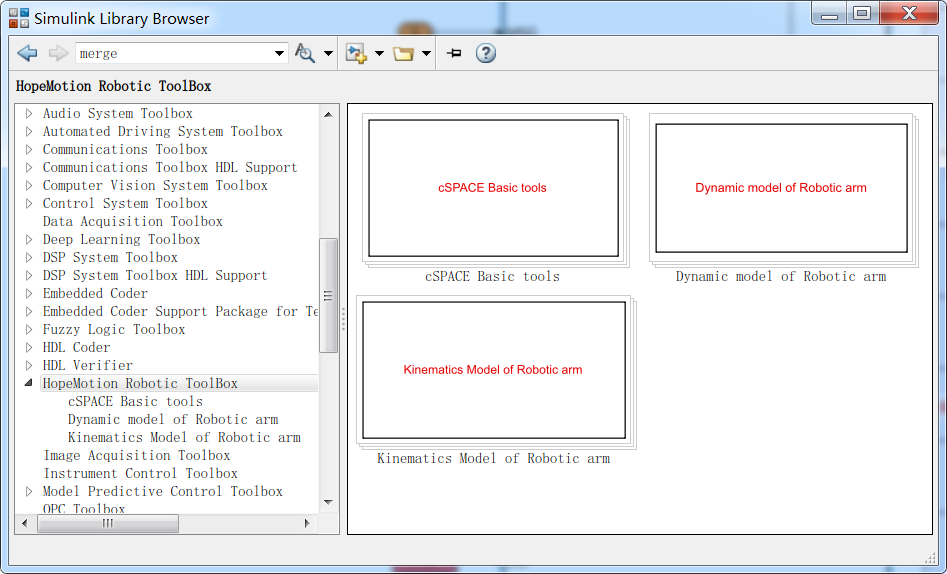
CSPACE工具箱
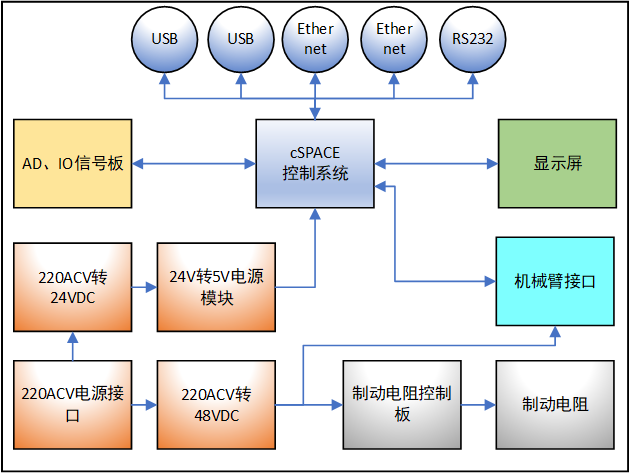
CSPACE硬件系统结构图
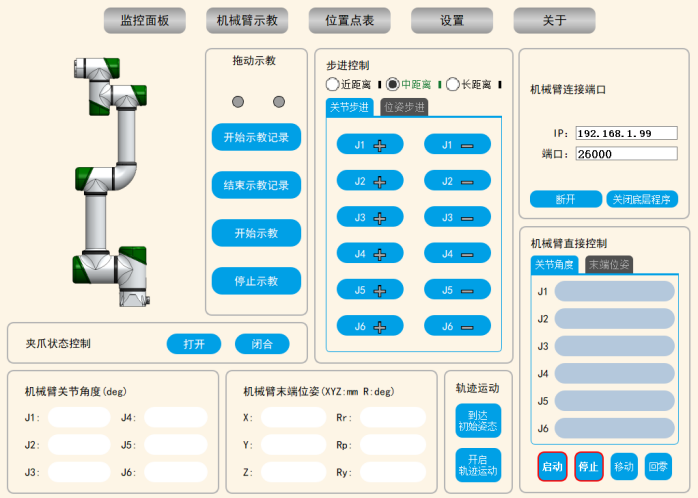
控制界面
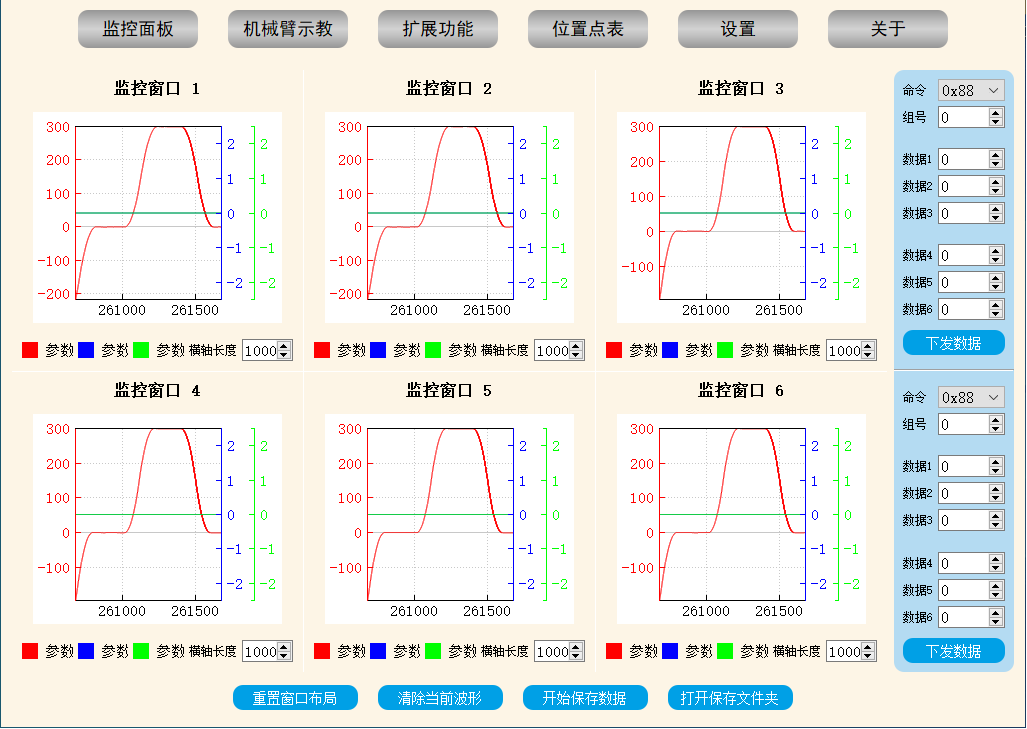
连续命令下发界面
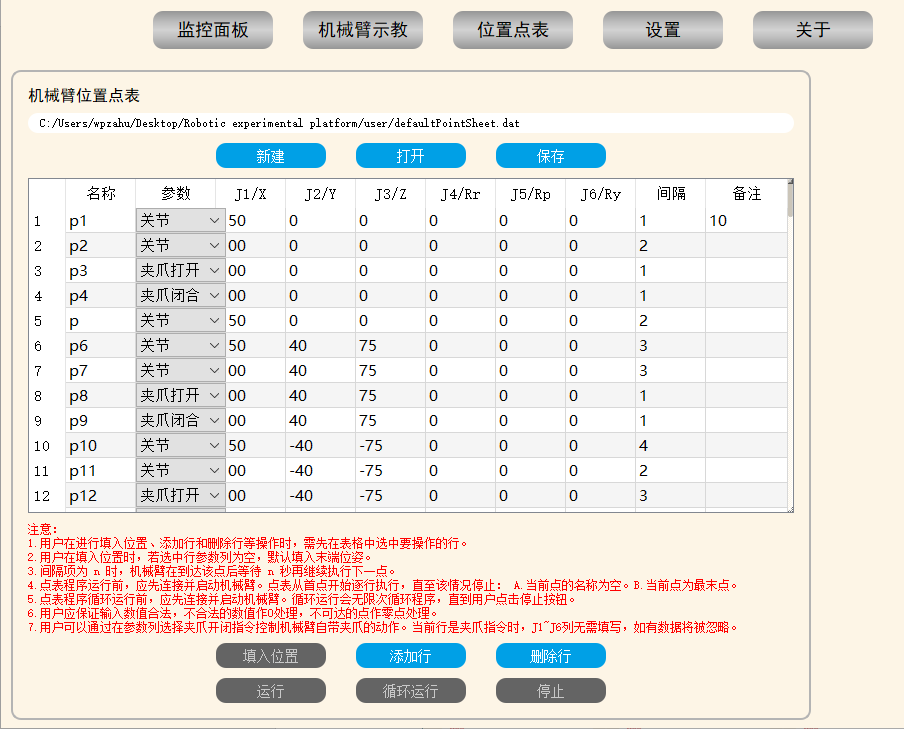
界面软件(控制、循环运动、数据采集显示)
- 上一篇:CSPACE实时操作系统高级版
- 下一篇:CSPACE-V3嵌入式系统版


