

移动平台,机械臂与视觉系统相结合的综合场景
发布日期:2021-09-03 浏览次数:2674
1. 基本信息
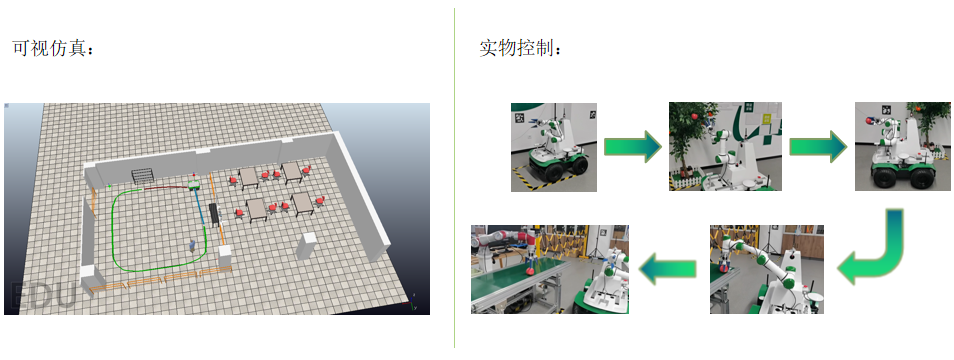
机器人学的两种典型机器人,移动机器人+机械臂,通过与深度学习相结合,实现:自主移动->水果定位->水果采摘->预定路线运送->水果分拣的整套流程。
2. 项目介绍
本定制项目主要由:中科深谷机器视觉伺服系统、中科深谷移动平台、中科深谷柔性三指夹爪、高精度定位系统、六自由度协作机械臂、工业传送带、视觉识别目标、仿真果树等八部分组成。整套系统按照从建模到仿真,从仿真再到实物控制的理念来完成开发,保证了开发过程的高效性和安全性;以ROS作为基本开发平台,通过Matlab/Simulink和ROS联合开发而成。为人工智能相关实验室建设提供开源平台支撑。
3. 研究背景
机器人学涉及的内容很多,主要有:坐标系变换、运动学和动力学、系统结构、传感技术、控制技术、行动规划和应用工程等。机器人学的研究推动了许多人工智能思想的发展,有一些技术可在人工智能研究中用来建立世界状态的模型和描述世界状态变化的过程。关于机器人动作规划生成和规划监督执行等问题的研究,推动了规划方法的发展。此外由于机器人是一个综合性的课题,除机械手和步行机构外,还要研究机器视觉触觉听觉等信感技术,以及机器人语言和智能控制软件等。可以看出这是一个设计精密机械信息传感技术人工智能方法智能控制以及生物工程等学科的综合技术。这一课题研究有利于促进各学科的相互结合,并大大推动人工智能技术的发展。
4. 工程应用价值
场景方案主要是让学习者,掌握扎实的自然科学基础理论和机器人系统的设计、制造、感知、控制与应用等方面的专门知识,具有良好的学习和实践能力、创新创业意识和宽广的国际视野,具备解决机器人工程相关领域复杂工程问题能力的卓越人才。可继续深造,或在机器人相关的专业领域和交叉领域从事设计制造、科技开发、应用研究、运行管理等工作。
5. 中科深谷移动抓取平台的综合科研价值
本产品由驱控一体化移动底盘、协作机器人、避障传感器系统、激光雷达导航系统、北斗差分定位系统、3D深度视觉系统和基于5G网络的通讯系统等组成,平台融合了多种传感器数据采集、数据分析以及智能控制于一体,可以支持与部署当前流行的深度学习应用,是高级机器人研究和开发的综合性开源平台。
系统提供底层电机的驱动控制设计、移动机器人导航定位研究、机械臂的运动学和动力学研究、机器视觉开发和场景应用、5G远程通信应用等技术。平台支持MATLAB/Simulink和ROS联合开发,可支撑相关科研人员在该平台上进行深度学习、自动驾驶、机器人移动作业等人工智能的应用研究,是机器人工程专业建设、机器人科研、人工智能研究知名的教学、科研载体,也是面向室外作业、农业摘取、巡逻作业等产业应用的高级实验平台。



