多传感器融合移动教学平台,专注教学研究与应用
发布日期:2021-10-08 浏览次数:3275
产品概述
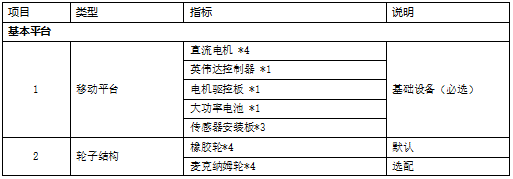
平台是由移动底盘本体、可选配传感器模块组成。采用DC24V 15Ah可保障车体6个小时的充足续航。平台支撑MBD开发方法在ROS机器人操作系统上结合GAZEBO仿真,打通平台底层驱动搭建、算法部署、仿真测试和功能样机实地测试四大环节,通过大量的传感器支持和传感器数据融合,为教学提供优越的开放性支撑。
系统控制算法代码开源,提供丰富的2D/3D机器视觉实验、激光雷达定位导航实验等案例、电机PID调节实验、导航规划算法实验、ROS通讯实验等。可扩展语音识别、AI智能识别、远程控制、无线图传、雷达数据分析实验等功能。该系统既可以作为自动化专业、机器人专业、人工智能专业、智能科学与技术专业、机械电子专业、智能制造专业、机械工程专业中相关如《移动机器人》、《机器人操作系统》、《传感器》、《机器视觉》、《机器人导航与控制》《机器人学导论》、《机器人控制技术》、《计算机控制技术》、《电机与伺服控制》、《机器人伺服驱动技术》、《机电一体化技术》等课程的配套教学实验实践平台。
产品特点
(1)支撑机器人建模仿真、机器人操作系统、传感器、机器人学、机器人控制等教学实验,以及科研领域的视觉算法验证实验和导航控制算法实验等。
(2)伺服性能优良,运动定位精度高,车体采用模块化设计,易于安装,人机交互友好,使用便捷。
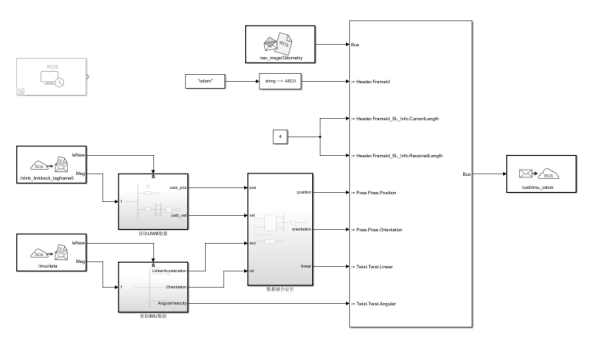
(3)控制系统除了支持主流的ROS,还可以采用MATLAB/Simulink软件进行编程,用户可以更好更便捷地研究控制算法,并可支撑高级的控制算法验证。
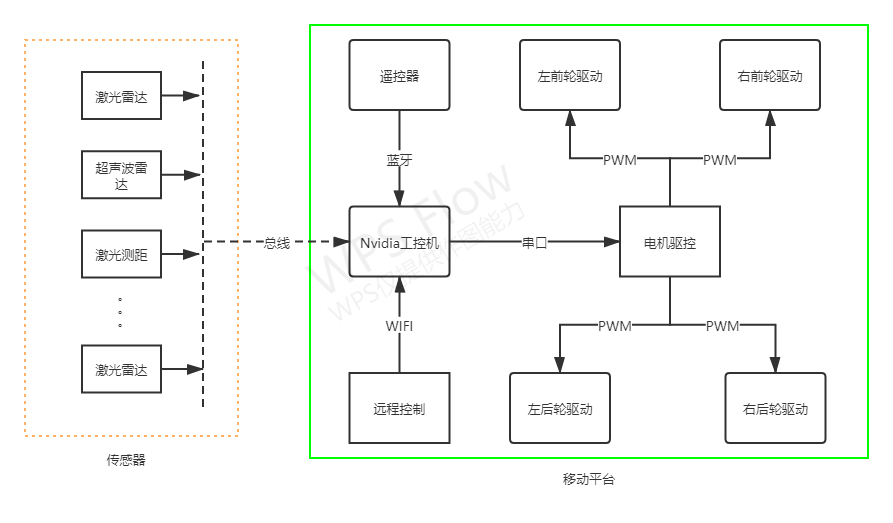
(4)控制系统采用ROS通讯架构,底盘控制采用USB转串口通讯,控制周期可以缩短到20ms以内。
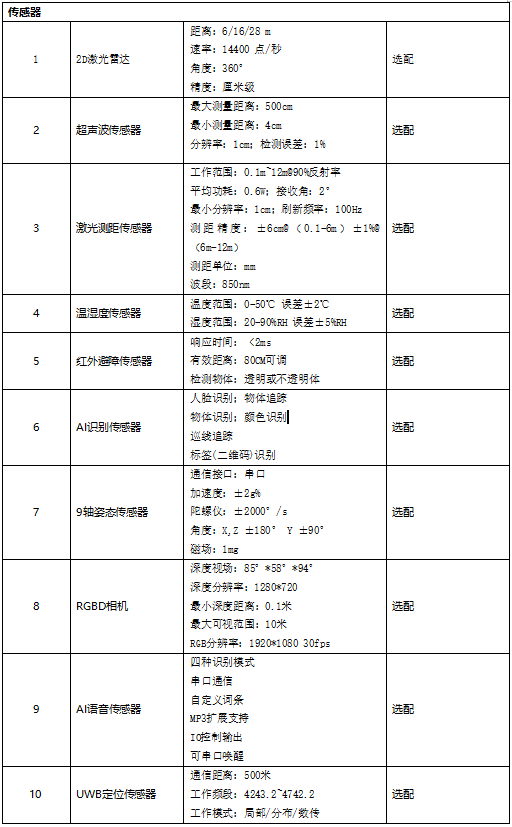
(5)通过2D激光、深度相机、超声波等传感器,完成多传感器数据融合感知,获取周边环境信息。
系统框图
应用专业
(1)车辆工程
(2)机器人专业
(3)机械电子专业
(4)机械工程专业
(5)自动化专业
(6)智能制造专业
(7)计算机专业
(8)人工智能专业
本科生教学课程
(1)机器人学
(2)机器人建模与仿真
(3)自动控制原理
(4)机器人操作系统
(5)计算机控制技术
(6)传感器技术及应用
(7)机器人视觉技术
(8)移动机器人导航与控制
(9)伺服电机控制与应用
典型教材推荐
《机械工程控制基础》 华中科大 杨叔子 院士 《机器人学导论(第四版)》 美国斯坦福大学 John.J.Craig 教授
《机器人控制技术》 陈万米,上海大学教授,博士
《计算机控制技术(第四版)》顾德英,东北大学,教授,硕导
《机器人技术基础》 熊有伦 华中科技大学 教授博导,科学院院士
《机器人操作系统浅析》 (美) 杰森 M. 奥凯恩 (Jason M.O’Kane) 教授
《传感器技术及应用》 北京理工大学 陈文涛 硕导
《机器视觉》 (美)伯特霍尔德·霍恩 教授
《移动机器人导航控制与遥感》 (美)库克
《电机与控制》 北京大学 马志敏 教授
实验案例(部分实验内容需要使用选配件)
ROS基础学习
(1)ROS基本使用-小海龟实验
(2)ROS消息、服务、动作的使用
(3)ROS传感器的配置与使用
(4)RVIZ与rqt的配置与使用
(5)ROS参数服务器使用与多机通讯
(6)TF坐标变换使用与配置
(7)机器人各部件建模
(8)串口驱动通信实验
传感器数据采集
(9)超声波传感器数据采集
(10)激光测距传感器数据采集
(11)温湿度传感器数据采集
(12)红外避障传感器数据采集
(13)UWB定位数据采集
移动机器人实验平台控制
(14)激光雷达、里程计、IMU的使用与校准
(15)使用ROS指令控制机器人移动
(16)使用gmapping算法构建地图及修正
(17)使用cartographer算法构建地图与增量建图
(18)navigation自主导航与避障
(19)纯视觉方法建图与导航
(20)激光雷达与惯导融合建图导航
(21)IMU与UWB数据融合定位
(22)如何使用ROS语音控制
(23)如何使用视觉牵引车辆到达目标
RGBD视觉传感器实验
(24)机器视觉基本应用-参数调整
(25)Canny边缘检测实验
(26)Contour轮廓检测实验
(27)Hough线段检测实验
(28)人脸检测实验
(29)图像旋转缩放变换实验
(30)Haar+boosting特征检测实验
(31)视觉的实时测距与定位实验
(32)视觉的目标位姿测定实验
(33)移动机器人精准移动与视觉实验
(34)机器学习SVM训练实验
(35)机器学习KNN训练测试实验
(36)TensorFlow实现神经网络实验
(37)TensorFlow实现AlxNet实验
(38)TensorFlow实现VGGNet实验
(39)TensorFlow实现Google Inception Net实验
(40)TensorFlow实现ResNet实验
MATLAB-ROS机器人控制
(41)MATLAB-ROS网络通信
(42)Simulink避障算法实验
(43)Matlab路径跟踪
(44)Matlab轨迹规划
实验预览
传感器融合
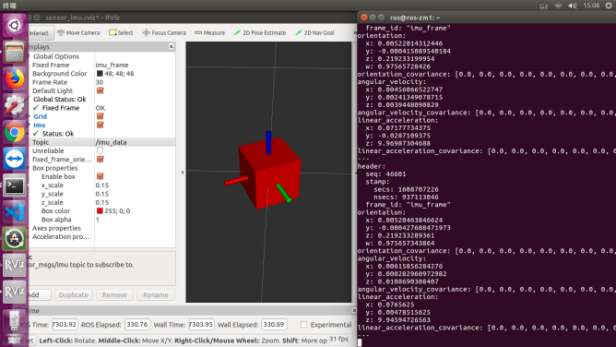
惯导传感器数据采集
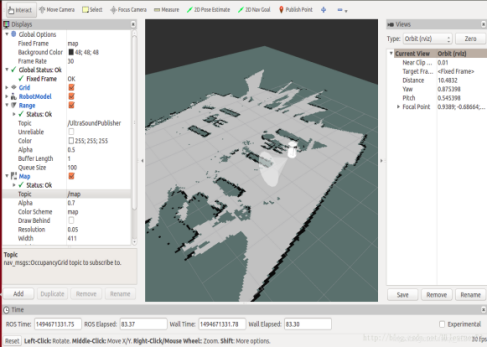
激光建图
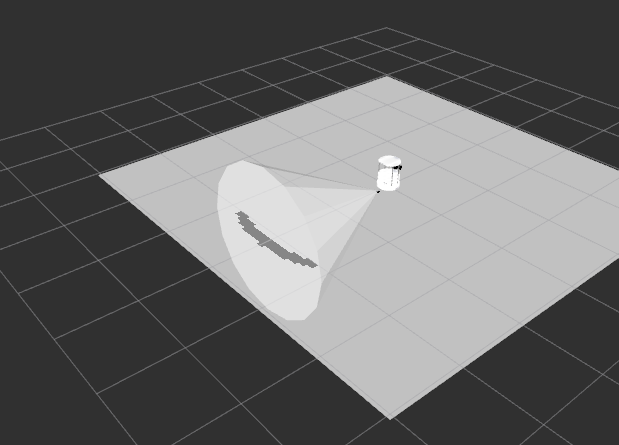
超声波传感器测试
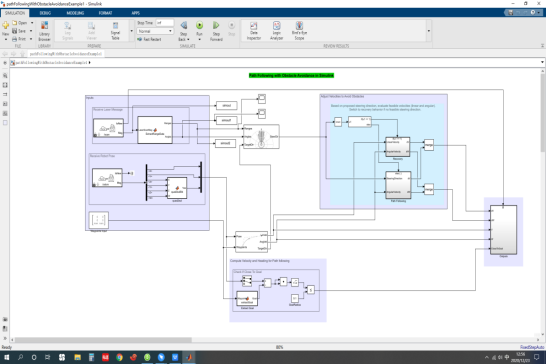
避障导航模型

移动控制
系统配置