

如何搭建一款基于机器视觉的移动抓取机器人?
发布日期:2022-04-13 浏览次数:2695
随着人力成本的攀升,人口的老龄化,制造业从劳动密集型向自动化智能化的升级,社会发展从IT时代正逐步发展到RT(Robotic Technology)时代,以移动机器人、机械臂、机器视觉为代表的机器人技术将是下一个十年高校科研的热点,经济发展的重要增长点。
MIR 睿工业数据显示,2021中国协作机器人出货量将达14372台,同比增速将达91.3%;而中国移动机器人(AGV)产业联盟数据也显示,工业自主移动机器人(AMR)每年销量都以翻倍的速度在增长。这两种机器人的迅速发展,催生出了新的机器人形态——那就是将这两种机器人结合在一起的基于机器视觉的移动抓取机器人。
“有手有脚有眼睛”的机器人,逐渐成为了未来机器人产业发展的重要趋势,可以满足更多细分场景的需求。
01 视觉采摘机器人助力某省农科院打造智能农业
基于此背景下,深谷学院技术专家张弛带领研发团队开发了这套基于机器视觉的四驱四转移动机械臂采摘机器人,旨在为研究SLAM算法、深度视觉、移动抓取等方面的实验室和研究机构提供一款硬件丰富,软件开源的高性价比开发平台,助力农业机器人科研成果的转化。本项目已应用于某省农科院试验田,并取得了较好的应用效果。

四驱四转移动机械臂采摘机器人由先进的四轮驱动四轮独立转向移动机器人、导航系统、六轴协作机械臂、计算机监控软件、3D视觉系统、夹爪等组成,能识别目标并移动到附近,控制机械臂进行采摘,自动沿着设定的目标点或路径,进行采摘作业。
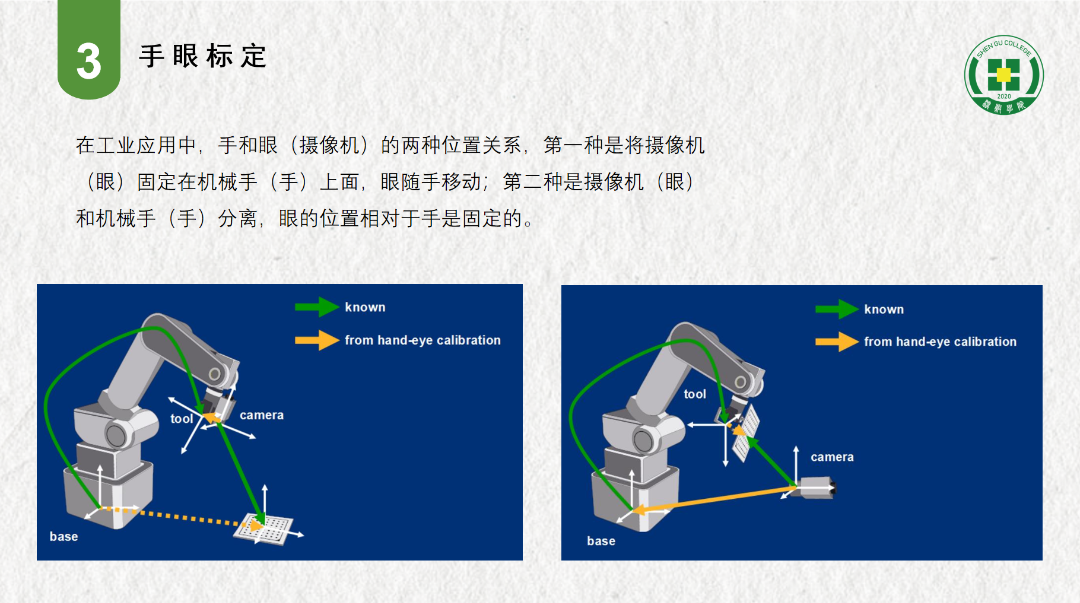
移动底盘就是移动抓取机器人系统的【腿脚】,负责“行走”;机械手臂则是机器人系统的【手】,而这个【手】是一个子系统,集成了手臂、执行末端(一般为电动夹爪)、视觉相机。整个机器人系统相互协作,共融交互,最终实现精准移动抓取。
该项目解决方案集成了导航系统、视觉识别、机械臂抓取等系统,可用于在非结构化环境中以相对较高的准确率在户外农林中自动识别并采摘水果、蔬菜、茶叶等农作物。
02 系列高质量的项目分享直播
深谷学院已连续1个月为大家直播分享项目开发的干货知识,没有及时收看的机器人爱好者可以扫码文末的二维码进入深谷学院,观看直播回放(往期精彩:《传送带视觉抓取在农业中的应用》、《3D视觉、柔顺控制和螺丝锁付技术及精密装配的应用探索》)。
我们也建起了机器人爱好者交流群,让人工智能与机器人相关行业的伙伴们能在这里提问、交流,互相学习。
本期的项目直播深谷小助请来了项目负责人张弛,和团队中的主力工程师杨锦帆,带大家了解四驱四转电控系统的开发,学习在狭窄空间下的多传感器融合激光导航,了解机械臂以及视觉处理在农业采摘场景的应用以及开发等内容。
这里我们提出三个问题请大家思考一下:
第一,怎么搭建一款基于机器视觉的移动抓取机器人?
第二,如何让它在狭窄的高相似度的环境下进行精准的导航?
第三,如何在复杂干扰的环境里提高视觉识别的效果?
这些问题都会在本次直播中进行具体阐述。快拉着你的同事、队友一起来占位收听《农业应用场景下自主导航及机械臂视觉抓取》,本周五19:00开课:
届时,请大家端好小板凳,电脑/手机打开深谷学院准时收看。各位机器人爱好者们,还想和哪些大咖梦幻联动呢,快在评论区告诉深谷小助吧!
深谷学院项目分享系列直播
深谷学院是高品质的免费开放机器人专属学习平台,线下已开展了多期人工智能与机器人系列师资培训,累计培养人次300余名,线上累计学习20万人次。
为了让更多有志于未来在机器人领域发展的机器人爱好者了解和学习经典项目,3月15日,深谷学院正式开启了“人工智能与机器人培训之项目分享”系列直播活动,齐聚多位具备丰富的工业项目经验的资深工程师,将在未来5个月内通过直播分享他们在相应领域做出的创新技术成果、行业落地经验。敬请期待!

扫码进入深谷学院


