

网络化智能控制三维实时仿真系统(CSPACE5.0)
发布日期:2021-04-22 浏览次数:3196
系统简介
该系统是基于互联网的三维虚拟实时仿真控制系统。系统集成了20种三维虚拟实验设备,可以对各类经典控制(例如基于传递函数的PID控制、频率响应法、根轨迹法)、现代控制(基于状态空间方程的LQR控制)、先进控制系统(例如神经网络控制等智能控制系统)进行实时仿真,它可针对各种三维虚拟被控制对象,在互联网浏览器中对控制方法和策略进行闭环控制系统的可视化组态设计;然后自动生成可执行代码,经网络下载到实时仿真控制器中执行,实现控制系统的实时仿真;同时经网络化可视监控组态设计可实现远程监视和远程调试。该系统主要由以下几个部分组成:1个网络化实时控制仿真器,包含20块3D虚拟实验设备卡。1个系统服务器,1个5口路由器和1个20口交换机。
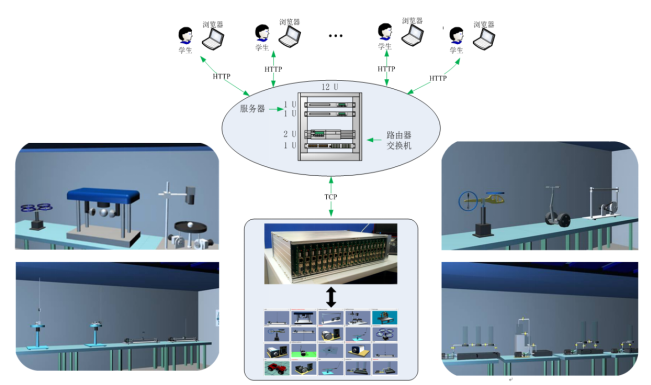
系统框图虚拟仿真系统结构
系统功能及特点
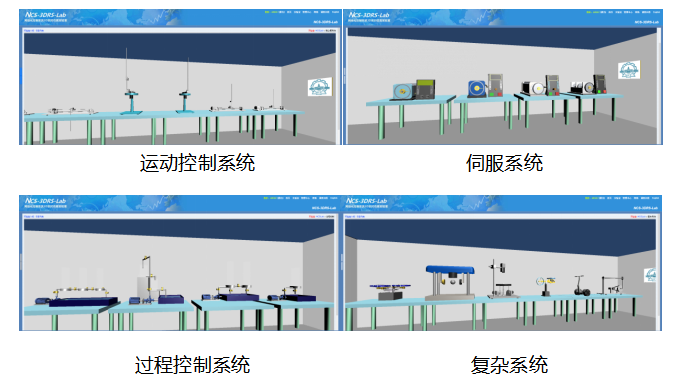
该系统可作为自动控制理论和控制技术教学、研究、实验和评估的平台,可以快速建立闭环控制系统原型,进行控制算法开发、实现和验证等工作,搭建起控制理论与实际应用之间的桥梁。该系统包含4个子实验室(运动控制、伺服控制、过程控制、复杂控制),集成了20种三维虚拟被控制对象,可以利用该平台学习这些被控制对象的控制方法。系统主要包含高性能的网络化实时控制仿真器和功能强大的系统服务器两个部分。
第一部分:网络化实时控制仿真器
网络化实时控制仿真器运行具体控制算法,通过网络接口接收监控组态平台的控制参数与控制命令,并将控制对象的运行状态实时上传至监控组态平台。它基于20个高性能、低功耗的32位ARM微处理器,运行嵌入式操作系统,采用模块化设计,提供网络接口,具有较高的运行速度和较大的寻址能力,加上嵌入式操作系统的多任务和实时性,可以完全保证复杂控制算法的流畅运行。

网络化实时控制仿真器
第二部分:系统服务器
系统服务器用来与用户进行交互,帮助网站完成Web仿真和编译功能。系统服务器具有稳定、高效的特点并带丰富的功能,包括:(1)系统设定配置;(2)首页页面管理;(3)实验室的管理;(4)实验设备的管理;(5)用户管理;(6)新闻管理等。该系统可以7*24小时运行,可满足20人同时在线进行实验,同时具有共享算法功能,用户也可以根据系统提供的资料独自进行实验
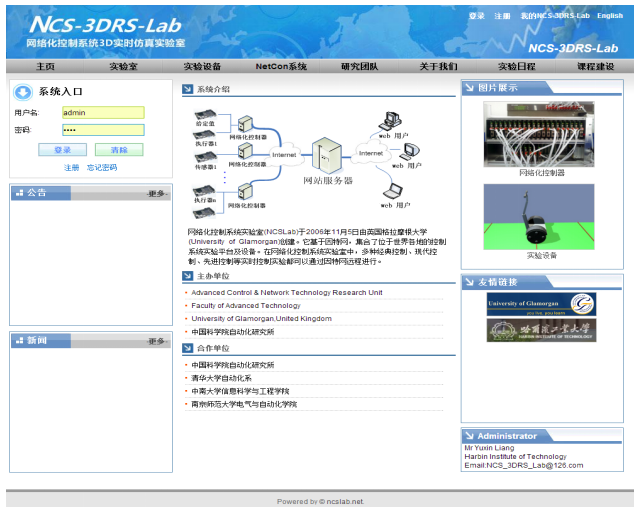
网络化控制系统三维虚拟实时仿真系统界面
支撑开设实验项目
|
序号 |
虚拟实验设备名称 |
提供的模型及演示算法 |
用户可自行设计的控制算法 |
|
1 |
线性一级倒立摆 |
状态空间方程模型和LQR演示算法 |
古典控制,如频率响应控制。 现代控制,如基于能量的控制方法。 先进控制,如串联模糊控制。 |
|
2 |
线性二级倒立摆 |
状态空间方程模型和LQR演示算法 |
古典控制,如PID控制。 现代控制,如变结构控制。 先进控制,如BP神经网络控制。 |
|
3 |
环形一级倒立摆 |
状态空间方程模型和LQR演示算法 |
古典控制,如根轨迹法设计控制器。 现代控制,如状态空间极点配置。 先进控制,如串联模糊控制。 |
|
4 |
环形二级倒立摆 |
状态空间方程模型和LQR演示算法 |
古典控制,频率响应控制。 现代控制,如基于遗传算法的LQR。 先进控制,LQR模糊复合控制。 |
|
5 |
单容水箱 |
传递函数、状态空间方程模型和PID演示算法 |
古典控制,PI控制、PD控制、带死区的PID控制等。 现代控制,如极点配置。 先进控制,如模糊控制。 |
|
6 |
温度实验系统 |
传递函数、状态空间方程模型和PID演示算法 |
古典控制,如PID控制。 现代控制,如最优控制。 先进控制,模糊控制。 |
|
7 |
压力实验系统 |
传递函数、状态空间方程模型和PID演示算法 |
古典控制,如PID控制。 现代控制,如最优控制。 先进控制,模型预测控制算法,自适应控制。 |
|
8 |
传递函数、状态空间方程模型和PID演示算法 |
古典控制,如PID控制。 现代控制,如最优控制。 先进控制,型预测控制算法,自适应控制。 |
|
|
9 |
力矩电机 |
古典控制,如位置控制、前馈控制。 现代控制,变结构控制。 |
|
|
10 |
直流电机 |
状态空间方程模型和LQR演示算法 |
古典控制,如转速电流双闭环控制,比例型速度调节,比例积分型速度调节。 现代控制,如变结构控制。 |
|
11 |
异步电机 |
状态空间方程模型和LQR演示算法 |
古典控制,如变频调速控制,正弦波脉宽调制。 现代控制,如变结构控制。 |
|
12 |
步进电机 |
状态空间方程模型和LQR演示算法 |
古典控制,如前馈控制。 现代控制,如变结构控制。 |
|
13 |
球杆系统 |
状态空间方程模型和LQR演示算法 |
古典控制,如PD控制、PID控制。 现代控制,如极点配置。 先进控制,如智能控制。 |
|
14 |
磁悬浮系统 |
状态空间方程模型和LQR演示算法 |
古典控制,如根轨迹控制、频率响应控制实验。 先进控制,如模糊PID控制。 |
|
15 |
板球系统 |
状态空间方程模型和LQR演示算法 |
古典控制,如PID控制。 现代控制,如解耦控制。 先进控制,如模糊控制。 |
|
16 |
二自由度飞行器 |
状态空间方程模型和LQR演示算法 |
古典控制,单通道PID控制实验 现代控制,如极点配置。 先进控制,如模糊控制。 |
|
17 |
三自由度飞行器 |
状态空间方程模型和LQR演示算法 |
古典控制,单通道PID控制实验。 现代控制,如极点配置。 先进控制,如RBF神经网络控制。 |
|
18 |
两轮自平衡小车 |
状态空间方程模型和极点配置算法 |
现代控制,如LQR配置。 先进控制,如模糊PD控制。 |
|
19 |
卫星模型 |
编队算法演示 |
古典控制,如PID控制。 现代控制,如LQR控制。 先进控制,如智能控制。 |
|
20 |
小车模型 |
队形变换算法演示 |
古典控制,如PID控制。 现代控制,如极点配置。 先进控制,如智能控制。 |
- 上一篇:多自由度协作灵巧手
- 下一篇:全场景智能制造设计与虚拟仿真系统(数字孪生)


