

CSPACE - RT实时操作系统版
发布日期:2021-04-08 浏览次数:3961
产品概述
为满足高校机电控制类、电子信息类专业控制方向教学,为赋能高校老师从事科学研究,为助力企业和科研院所开发功能样机、缩短产品研发周期、加速成果产出,公司推出自主研发的CSPACE控制与半实物仿真系统。该产品基于ARM Cortex-A9、实时Linux和MATLAB/Simulink开发,拥有AD、DA、IO、Encoder、PWM、CAN、SPI等丰富的硬件外设接口,包含一套功能强大的监控软件。该产品结合计算机仿真和嵌入式实时控制技术,能实现硬件在回路(HIL)和快速控制原型(RCP)设计的功能,是基于模型设计(MBD:Model-Based Design)典型的产品,是国内可对标国际控制与仿真产品的本土化快速控制原型与半实物仿真系统。

图1 CSPACE控制与半实物仿真系统
该平台有以下几大特色:
1、支持RCP快速原型设计,实现用户仿真模型到嵌入式控制原型的自动转换,将用户从复杂的嵌入式开发中解脱出来,帮助用户把精力集中到算法仿真的设计实现与验证上来。
2、支持HIL硬件在回路测试,加速产品原型设计开发速度,缩短设计和验证周期,降低用户开发测试成本,并提升产品性能和稳定性。
3、采用实时Linux操作系统,方便大数据量、多任务的处理,方便使用linux丰富的系统资源,如管理与应用进程、线程、任务、队列、内存、文件等。
4、有EtherCAT主站协议,支持现在通用的高实时性的EtherCAT驱动器,满足用户对高动态性能的控制需求,该主站协议不需要额外付费节省用户的成本。
5、有Ethernet接口,可以采集该类型接口的传感器等设备,如视觉、激光测距、机械臂等,满足用户多种应用需求。
6、IO资源支持广泛,拥有AD、IO、CAN、RS232、RS485、Camera视觉、USB Host等接口,满足不同领域及行业客户的差异化需求。
7、提供功能强的上位机软件,支持多达30组以上的控制参数的下发,支持多达18通道的数据显示、保存,方便处理数据。
8、可广泛应用于汽车工业、航空航天和工业自动化、机器人控制、机电一体化控制、新能源、图像视觉、军工等领域。
该系统既可以作为自动化、机器人、机械电子、电气工程、机械工程、电子信息等专业中的《嵌入式Linux实时操作系统》《机电传动控制》《自动控制原理》《现代控制理论》 《智能控制理论》《MATLAB 编程与应用》《传感器与检测技术》《信号与系统》《机器人学》 《电机学》 《运动控制系统》 等课程的配套工具,也是支撑相关领域控制算法研究的平台。
实验平台
01 开发流程
CSPACE控制与半实物仿真系统主要主控计算机、实时控制器(CSPACE)、监控上位机、被控对象4部分组成。

图2 CSPACE开发流程
传统的采用基于需求文档的手动编写代码的方法,需要反复试错或执行物理原型测试,如果某项需求发生变化,您将不得不重新编码和构建整个软件系统,继而会导致项目延迟数日乃至数周。如果使用基于模型的设计,则您无需手写代码和使用文档,而是创建系统模型。以协作机器人为例,模型由机械臂、电机和控制器设计组成。您可以随时进行模型仿真,即时查看系统行为,测试多种假设分析场景,同时无需承担风险和延迟,也无需依赖昂贵的硬件。
本公司CSPACE产品采用基于模型设计的方法,该方法与传统开发工作流程的两个主要区别:
1、将工作流程中大量费时或易出错的步骤(如代码生成)自动化。
2、从需求捕获到设计、实现和测试,系统模型始终占据开发流程的核心。
在开发过程中,MIL主要用于测试算法,SIL和PIL主要用来测试代码来保持代码与模型的一致性,PIL主要用来测试控制器。
02 CSPACE控制器参数


CSPACE工具箱

基于CSPACE开发的各类机器人


界面软件(控制、循环运动、数据采集显示)
实验内容一览
列表2所列实验内容为可以在本平台完成的所有实验列表,所有实验程序均在Matlab/Simulink软件中编写,所有程序源代码均开放,可以自由修改,实验均配有演示视频。
表2 实验项目
|
接口功能软件 |
应用 |
|
一般性的IO控制开发 |
电磁阀、继电器、按键等开关量的控制 |
|
AD模拟信号采集和显示 |
模拟信号采集包括压力、温度、流量、力矩等 |
|
RS232串口通信 |
可广泛应用于自动化设备与个人电脑间的通信 |
|
CAN总线通讯 |
可广泛应用于汽车、轨道交通、电机驱动等领域设备间的通信 |
|
Ethernet总线通讯 |
可广泛应用于图像、视频、文件的采集和传输 |
|
HIL硬件在环仿真技术项目开发 |
原理可用于汽车控制器、无人机、导弹导引头等硬件在环仿真 |
|
EtherCAT (以太网控制自动化技术) |
用于控制、自动化技术的以太网,高精度机械臂、高档数控系统等实时性要求高的应用;大型风力发电机组、半导体等对电机轴数要求较多的产品 |
|
CMOS等图像传感器模块接口 |
8位数据控制接口的图像传感器或摄像头,用于图像采集、分析、处理(推荐使用 200万像素 OV2640、OV2659等CMOS摄像头) |
本科和研究生教学课程:
1、自动控制原理
2、现代控制理论
3、电力电子技术
4、电力拖动系统
5、机器人学
6、机器人建模与仿真
7、机器人操作系统
8、计算机控制技术
典型教材推荐:
《现代控制系统》谢红卫 电子工业出版社教授,博导
《UNIX环境高级编程》戚正伟 人民邮电出版社 教授,博导
《机械工程控制基础》 华中科大 杨叔子 院士
《机器人学导论(第四版)》 美国斯坦福大学 John.J.Craig 教授
《机器人控制技术》 陈万米,上海大学教授,博士
《计算机控制技术(第四版)》顾德英,东北大学,教授,硕导
《现代控制理论》王宏华 河海大学教授,博士
《机器人技术基础》 熊有伦 华中科技大学 教授博导,科学院院士
《MATLAB建模与仿真》 哈尔滨理工大学 副教授,硕导
支撑科研方向:
1、直流无刷电机控制
2、交流异步电机控制
3、并网逆变器控制器
4、永磁同步电机控制器
5、机械臂高精度轨迹跟踪控制算法研究
6、动力学参数辨识
7、碰撞检测保护
8、拖动示教
9、力位混合控制、柔顺控制
10、冗余自由度运动学和动力学
11、基于深度学习的机械臂高级运动控制与应用
12、双臂协作
典型应用案例
1)中国科学技术大学、合肥工业大学、山东大学:振动控制,通过CSPACE的AD模块采集加速度信号,LVDT线性位移传感器信号,经过simulink搭建的振动控制算法运算后,通过DA或RS232通讯口控制电机或电流放大器,实现半主动和主动的减振。
2)华南理工大学、重庆大学、电子科技大学:并网逆变器的控制。
3)其它高校:
|
大学 |
研究领域 |
|
中国矿业大学 |
直线电机精密运动控制 |
|
南京工业大学、西安交通大学 |
磁悬浮轴承的控制 |
|
华中科技大学、中国科学技术大学 |
BMS的研究 |
|
西安交通大学、景德镇学院、南京大学、青岛大学、合肥工业大学、东南大学 |
机器人控制:通过CAN总线,给机械臂关节的伺服驱动器发送力矩、位置控制指令,读取关节角度信号,实现机械臂的运动学、动力学控制 |
|
上海交通大学、南京理工大学 |
机器人控制 |
|
吉林大学 |
客车气动刹车系统高速气动阀的控制 |
|
扬州大学等多所高校 |
永磁同步电机的驱动控制 |
|
上海大学、武汉大学、南洋理工大学等 |
外骨骼机器人的控制 |
|
南京大学等多所高校 |
六轴机械臂动力学控制 |
|
四川大学、重庆大学等 |
交流伺服电机精密运动控制 |
|
中国农业大学等 |
直线电机运动平台和机器人的控制 |
|
中北大学 |
新能源汽车电机的驱动器的研究 |
|
哈尔滨工业大学、中国科大、安徽理工大学等 |
倒立摆等机电设备的控制 |
|
中北大学、长安大学、安徽工程大学等 |
移动机器人轮毂伺服电机驱动器的开发 |
|
合肥工业大学、浙江大学、宿州学院等 |
电力电子逆变器的研究 |
基于CSPACE控制六轴机器臂实验
在MATLAB/Simulink搭建六轴臂的正解、逆解控制算法,下载运行在CSPACE中,通过cSAPCE的两通道CAN实时输出六轴机械臂的六个关节的控制指令、读取六个关节的数据,并通过高速串口上传六个关节的实时信息,用户可以在线查看6个关节的角度、电流,在线更改控制参数,实现对六轴机械臂的运动控制。
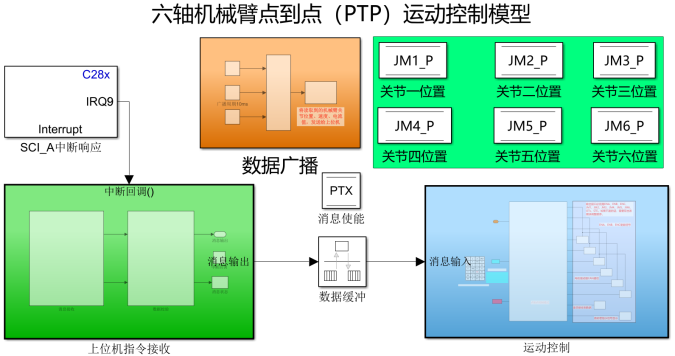

基于cSPACE的六轴机械臂控制模型 CAN通信传输模块
接收上位机控制指令,各个关节转动30度,对应仿真及实物控制如下图所示。
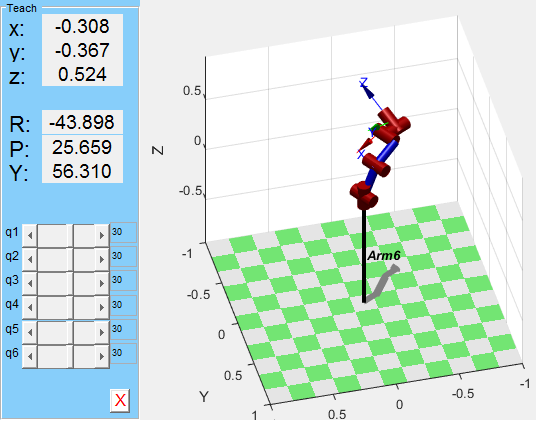


六轴机械臂正逆解仿真程序 六轴机械 轨迹规划
- 上一篇:CSPACE-V3嵌入式系统版
- 下一篇:开源视觉抓取移动机器人(基于深度学习)


