

CSPACE-V3嵌入式系统版
发布日期:2021-04-08 浏览次数:4065
产品概述
CSPACE控制与半实物仿真系统(型号:CSPACE-V3)是基于TMS320F28335 DSP和MATLAB/Simulink开发。拥有AD、DA、IO、Encoder、PWM、CAN、SPI等丰富的硬件外设接口,以及一套功能强大的监控软件。结合计算机仿真和嵌入式实时控制技术,能实现硬件在回路(HIL)和快速控制原型(RCP)设计的功能,也是基于模型设计(MBD:Model-Based Design)典型的产品。是国内可对标国际控制与仿真领域本土化的快速控制原型与半实物仿真系统。
RCP功能,系统可通过对MATLAB/Simulink对控制算法进行仿真,将输入、输出接口替换为公司的CSPACE模块,编译并自动生成DSP代码,在CSPACE上运行后就能方便地实现对被控对象的控制。
HIL功能,系统可运行Simulink搭建的被控对象的模型,模拟被控对象,通过输入接口接收控制量的输入,输出接口输出被控对象的状态,测试实际的控制器,实现硬件在回路仿真功能。
系统广泛应用于机器人、电机驱动、电力电子、汽车电子、自动驾驶、过程控制、机电一体化设备等控制领域,能有效支撑本科教学中建模与仿真教学课程, 是搭建电控系统、快速验证算法、发表论文和完成科研项目开发的控制系统开发产品级平台,被业界称为“超级控制器”。
产品特点
1.支持RCP快速原型设计,图形化编程,实现用户的MATLAB/Simulink仿真模型到嵌入式控制原型的自动转换。
2.支持HIL硬件在回路测试,用户的控制器等实物设备可以直接与CSPACE仿真器连接,动态验证实物控制器性能。
3.IO资源丰富,有丰富的IO板卡资源供用户选择,包括:SCI、PWM、CAN、RS232/485、GPIO、SPI等。
4.可在线修改多达15个变量,实时显示10组变量并自动存储数据。
5.应用领域广泛、操作便捷、性价比极高。
6.丰富的应用案例,便于用户使用,能快速搭建电控系统。
7.采用DSP作为主处理器,可独立于计算机而工作,也容易实现产品化设计。
8.强大的技术支撑,可以提供定制化开发服务,协助研究人员做好科研项目。
该系统既可以作为自动化、机器人、机械电子、电气工程、机械工程、电子信息等专业中的《机电传动控制》《自动控制原理》《现代控制理论》 《智能控制理论》《MATLAB 编程与应用》《传感器与检测技术》《信号与系统》《机器人学》 《电机学》 《运动控制系统》 等课程的配套工具,也是支撑相关领域控制算法研究的平台。
开发概图
传统的采用基于需求文档的手动编写代码的方法,需要反复试错或执行物理原型测试,如果某项需求发生变化,您将不得不重新编码和构建整个软件系统,继而会导致项目延迟数日乃至数周。如果使用基于模型的设计,则您无需手写代码和使用文档,而是创建系统模型。以协作机器人为例,模型由机械臂、电机和控制器设计组成。您可以随时进行模型仿真,即时查看系统行为,测试多种假设分析场景,同时无需承担风险和延迟,也无需依赖昂贵的硬件。
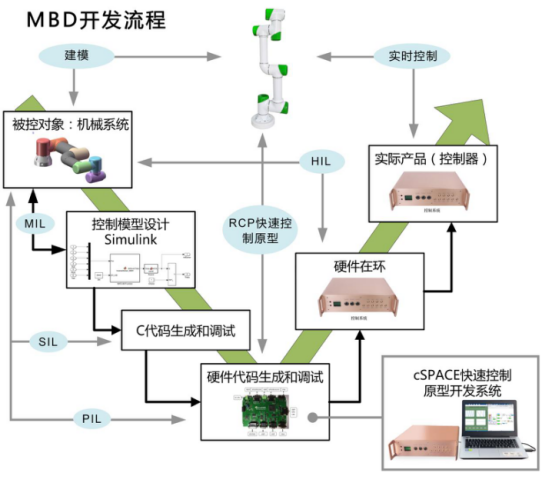
基于模型的开发流程图
本公司CSPACE产品采用基于模型设计的方法,该方法与传统开发工作流程的两个主要区别:
1.将工作流程中大量费时或易出错的步骤(如代码生成)自动化。
2.从需求捕获到设计、实现和测试,系统模型始终占据开发流程的核心。
在开发过程中,MIL主要用于测试算法,SIL和PIL主要用来测试代码来保持代码与模型的一致性,PIL主要用来测试控制器。
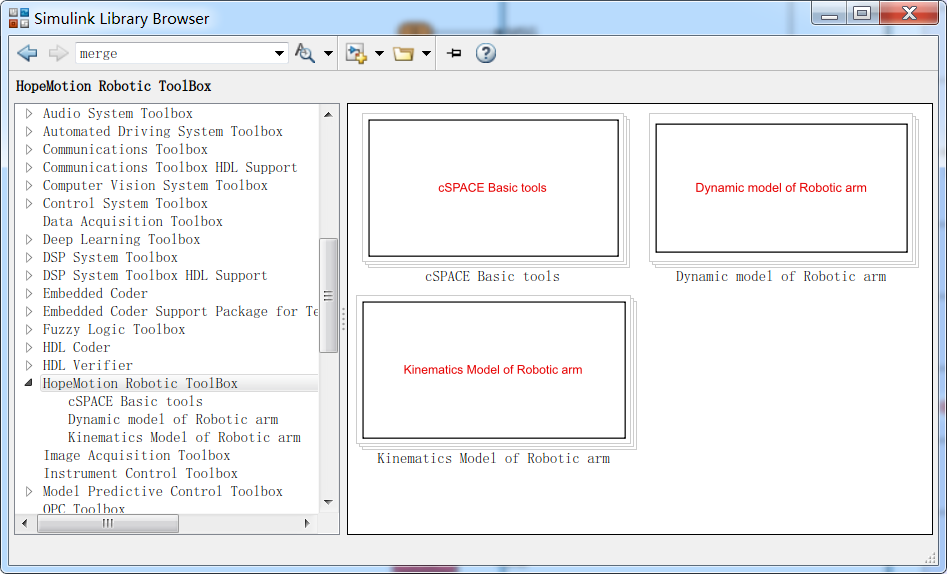
CSPACE工具箱
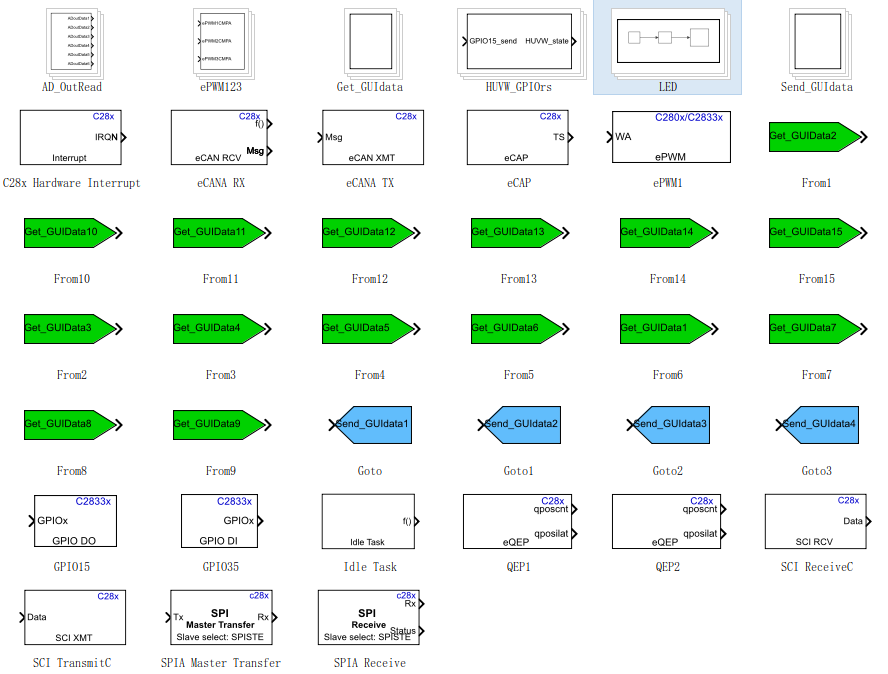
IO接口模块
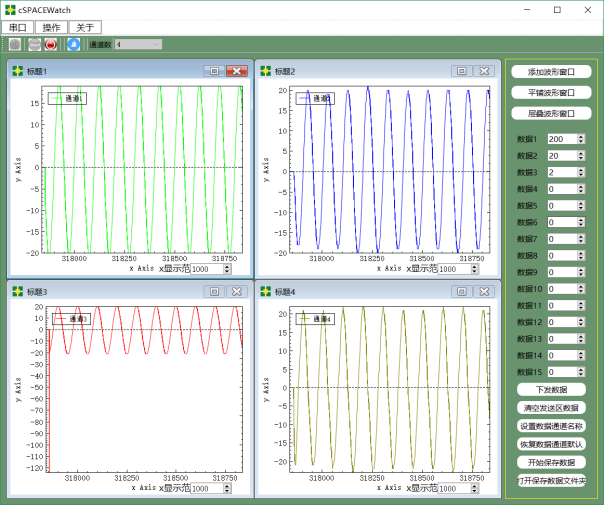
上位机监控界面
适配教材
《DSP的原理与开发》 《机电控制系统》 《自动控制原理》
《现代控制理论》 《智能控制理论》 《MATLAB 编程与应用》
本科和研究生教学课程:
1.自动控制原理
2.现代控制理论
3.电力电子技术
4.电力拖动系统
5.机器人学
6.机器人建模与仿真
7.机器人操作系统
8.计算机控制技术
可支撑典型教材推荐:
《现代控制系统》谢红卫 电子工业出版社教授,博导
《UNIX环境高级编程》戚正伟 人民邮电出版社 教授,博导
《机械工程控制基础》 华中科大 杨叔子 院士
《机器人学导论(第四版)》 美国斯坦福大学 John.J.Craig 教授
《机器人控制技术》 陈万米,上海大学教授,博士
《计算机控制技术(第四版)》顾德英,东北大学,教授,硕导
《现代控制理论》王宏华 河海大学教授,博士
《机器人技术基础》 熊有伦 华中科技大学 教授博导,科学院院士
《MATLAB建模与仿真》 哈尔滨理工大学 副教授,硕导
支撑科研方向:
1.直流无刷电机控制
2.交流异步电机控制
3.并网逆变器控制器
4.永磁同步电机控制器
5.自动控制原理如根轨迹、频率特性、PID控制等
6.智能控制算法如LQR、滑膜、模糊、神经网络等
7.机械臂高精度轨迹跟踪控制算法研究
8.动力学参数辨识
9.碰撞检测保护
10.拖动示教
11.力位混合控制、柔顺控制
12.冗余自由度运动学和动力学
实验内容
基础实验
1.LED实验
2.PWM实验
3.eQEP实验
4.SCI实验
5.SPI实验
6.CAN通信实验
7.AD&DA及上位机通信实验
高级控制实验
1.舵机机械手设备相关实验
2.关节模组设备相关实验
3.SCARA机械臂系统相关实验
4.三轴机械臂系统相关实验
5.六轴机械臂系统相关实验
6.振动控制台系统相关实验
7.并网逆变系统相关实验
8.倒立摆系统相关实验
9.永磁同步电机控制算法相关实验
10.灵巧手、仿生手系统相关实验
性能指标
|
|
CSPACE-单机版 |
|
额定电压 |
DC24V |
|
工作温度 |
-10℃~50℃ |
|
工作湿度 |
10%~90%,无凝结 |
|
主处理器 |
TMS320F28335 DSP 32位浮点数处理器 |
|
主处理器时钟 |
150MHz |
|
存储(片内) |
34K x 16bits SARAM;256K x 16 bits Flash |
|
机械臂 控制总线 |
2路CAN,其中1路与第3路编码器接口复用 |
|
AD转换器(片内) |
8通道;12位;输入0~3V;转换时间250ns |
|
AD转换器 |
6通道;16位;输入-10~10V;转换时间3.1us |
|
DA转换器 |
4通道;16位;输出-10~10V;转换时间10us |
|
其他外设 |
PWM、HALL、SCI、SPI、IIC、GPIO |
|
视频输出 |
无 |
|
上位机 |
支持,SCI接口 |
|
产品特点 |
外设丰富,高性价比,操作简便,实时性能好,控制周期可以达到数十微秒,除了信号采集和处理、机器人等机电控制,可用于电机驱动、电力产品(逆变器)等的控制系统更多开发 |
典型应用案例
1)中国科学技术大学、合肥工业大学、山东大学:振动控制,通过CSPACE的AD模块采集加速度信号,LVDT线性位移传感器信号,经过simulink搭建的振动控制算法运算后,通过DA或RS232通讯口控制电机或电流放大器,实现半主动和主动的减振。
2)华南理工大学、重庆大学、电子科技大学:并网逆变器的控制。
3)其它高校:
|
大学 |
研究领域 |
|
中国矿业大学 |
直线电机精密运动控制 |
|
南京工业大学、西安交通大学 |
磁悬浮轴承的控制 |
|
华中科技大学、中国科学技术大学 |
BMS的研究 |
|
西安交通大学、景德镇学院、南京大学、青岛大学、合肥工业大学、东南大学 |
机器人控制:通过CAN总线,给机械臂关节的伺服驱动器发送力矩、位置控制指令,读取关节角度信号,实现机械臂的运动学、动力学控制 |
|
上海交通大学、南京理工大学 |
机器人控制 |
|
吉林大学 |
客车气动刹车系统高速气动阀的控制 |
|
扬州大学等多所高校 |
永磁同步电机的驱动控制 |
|
上海大学、武汉大学、南洋理工大学等 |
外骨骼机器人的控制 |
|
南京大学等多所高校 |
六轴机械臂动力学控制 |
|
四川大学、重庆大学等 |
交流伺服电机精密运动控制 |
|
中国农业大学等 |
直线电机运动平台和机器人的控制 |
|
中北大学 |
新能源汽车电机的驱动器的研究 |
|
哈尔滨工业大学、中国科大、安徽理工大学等 |
倒立摆等机电设备的控制 |
|
中北大学、长安大学、安徽工程大学等 |
移动机器人轮毂伺服电机驱动器的开发 |
|
合肥工业大学、浙江大学、宿州学院等 |
电力电子逆变器的研究 |
基于CSPACE控制六轴机器臂实验
在MATLAB/Simulink搭建六轴臂的正解、逆解控制算法,下载运行在CSPACE中,通过cSAPCE的两通道CAN实时输出六轴机械臂的六个关节的控制指令、读取六个关节的数据,并通过高速串口上传六个关节的实时信息,用户可以在线查看6个关节的角度、电流,在线更改控制参数,实现对六轴机械臂的运动控制。
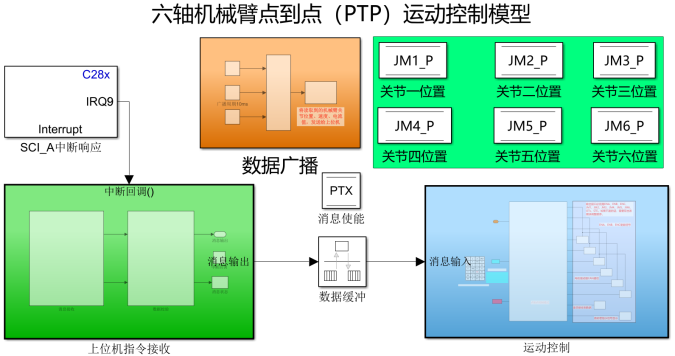

基于cSPACE的六轴机械臂控制模型 CAN通信传输模块
接收上位机控制指令,各个关节转动30度,对应仿真及实物控制如下图所示。
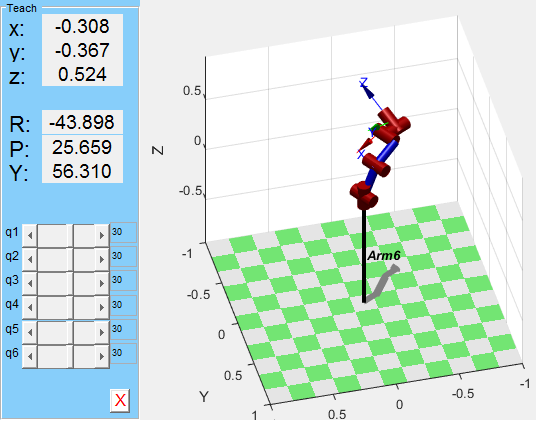


六轴机械臂正逆解仿真程序 六轴机械 轨迹规划


