

高性能夹爪
发布日期:2021-04-21 浏览次数:2779
产品概述
高性能夹爪采用革新式一体化设计,进行精确力控制及位置控制,行程及力度可变,适用于不同任务条件,可扩展,配套要求低,功能性强。
由伺服电机、夹爪平台组成,对现场环境要求低。电动夹爪末端夹具部分可随时更换,用户可根据自身所需要夹取的物品自行设计夹具部分,以保证夹爪能最大程度上完成夹取工作。也可切换手指构型与抓持模式的适应性机器人手爪,可自动适应不同形状的被抓取物体,无需更换手爪,实现一“手”多用,提升了机器人在服务业、物流、工业、检测等各个场景的抓取和操作能力,相比于传统的抓取方案更加方便和灵活。支持ROS,便于与机器人操作系统集成开发。

产品特点
大行程:适应大小不一物件。
精确力控:适应软硬不一物件、抓取力超过100N、可以连续调整抓取力度实现精确力控。
自适应抓持:适应形状不一物件。
一体化设计:高度集成、一体化集成电机、减速器、连杆机构与伺服驱动。
机械自锁:安全、稳定、掉电保持稳定抓持、功耗低。
无缝集成与扩展:易用、便于编程、支持USB, Ethernet, CAN, RS485等主流通信协议。
技术参数
|
名称 |
主要技术参数指标 |
|
|
驱动方式 |
伺服电机驱动 |
|
|
抓取方式 |
平行/包络 |
平行/对心/包络 |
|
最大行程
|
100mm(可扩展)
|
118mm(平行) 136mm(对心) |
|
可包络抓持物体直径 |
35-90mm |
20-100mm |
|
最大主持力 |
100N |
50N |
|
最大推荐负载 |
5-7kg |
3-5kg |
|
抓取速度 |
12-60mm/s |
20-100mm/s |
|
重复定位精度 |
0.05mm |
0.1mm |
|
自身重量 |
0.93Kg |
12Kg |
|
防护等级 |
IP54/IP67(可选) |
|
|
工作电压 |
24DC±10% |
|
|
待机功率 |
小于1W |
小于1.5W |
|
最大电流 |
1A |
|
|
通讯协议 |
USB,TCP/1P,EtherCAT,CAN2.0(可扩展) |
|
|
控制方式 |
位置、速度、力的控制 |
|
|
机械臂集成 |
UR或其他工业/协作机械臂,提供ROS接口 |
|
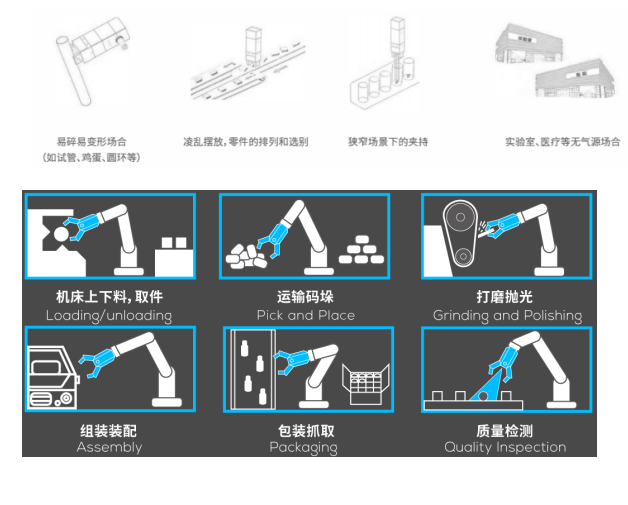
产品应用
- 上一篇:全场景智能制造设计与虚拟仿真系统(数字孪生)
- 下一篇:开源电力电子实验系统


