

机械手
发布日期:2020-04-01 浏览次数:3113
产品概述
机械手开发套件是一套模块化、遥控手柄控制、实现仿生手的正逆运动学控制的基础教学和科学研究开发套件。
该套件由电气部分和机械部分组成,其中电气部分由主控板、电机驱动板、电源转换板组成。机械部分由舵机,仿生手结构,遥控收发设备构成。既可以完成控制理论基础实验,也可以完成高级算法研究实验。
|
|
|
|
|
 |
产品特点
嵌入式和MATLAB/Simulink开发,快速搭建平衡算法模型;
自动生成代码;
驱控一体化设计,结构紧凑,运动灵活;
采用C2000 DSP控制芯片,可扩展高级应用算法;
丰富的实验内容;
丰富的硬件扩展接口。
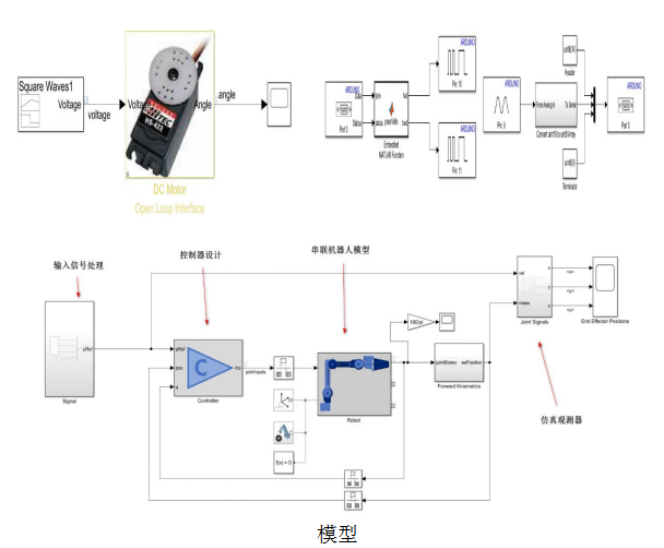
具体例程:基于模型设计的控制仿真与试验
基于模型设计方法搭建的整体框图,包含了运动学的数据处理,控制器设计,机器人模型,和观测器。在整个设计过程中,基于模型设计便于在每一个部分进行 验证,迭代设计,及时在每个设计的小部分及时发现问题,解决问题。
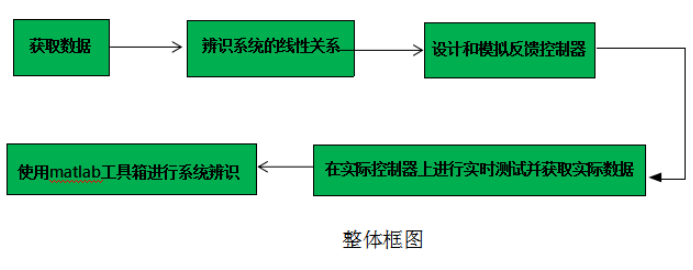
对于验证完成的控制器,基于模型设计方法的最后一步就是通过代码生成技术,生成目标控制器代码,完成控制器驱动。代码生成技术大大节省了开发的时间。
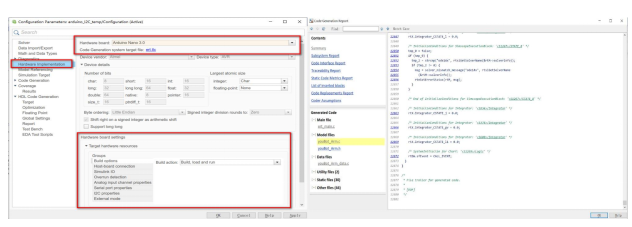
代码生成
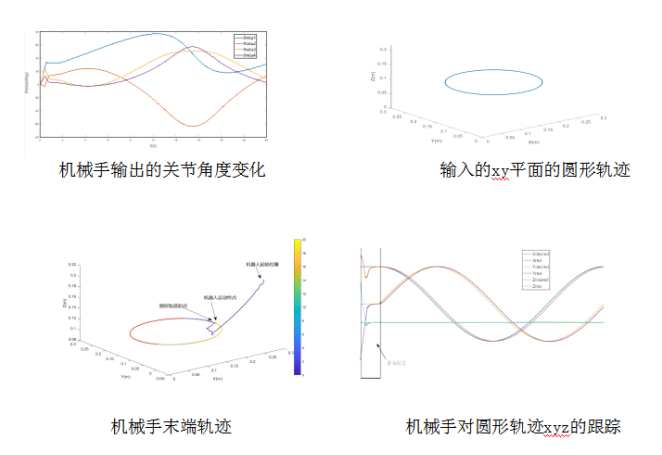
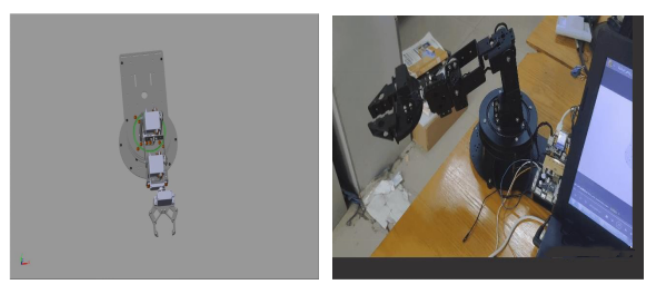
左侧的动画显示的是基于模型设计的控制器控制机械手虚拟仿真平台的效果, 右侧的动画显示的是通过C代码生成控制的机械手实物。通过参数辨识我们可以实现控制实物和控制仿真模型效果一致。
应用专业
自动化专业 机械电子专业 电子技术专业 机械工程专业
车辆工程专业 仪器科学专业 机器人专业
应用课程
《单片机》《计算机控制技术》《机械工程控制基础》《自动控制原理》
支持实验
TMS320F28027基础实验
LED跑马灯实验
IO配置实验之按键输入
SCI串口实验
Timer0中断实验
Epwm输出实验
模块功能应用实验
ADC——Epwm采样实验
SPI通讯——手柄接收信号
舵机驱动实验
机械手控制实验
机械手多路舵机控制实验
手柄控制实验
机械手多手势控制
性能指标
|
主要技术参数指标 |
|
1.主处理器:TMS320F28027(带XDS100V2板载仿真器) |
|
高速32位中央处理单元 |
|
60MHz(17.67ns) |
|
哈佛 (Harvard) 总线架构 |
|
高效代码(使用 C/C++ 和汇编语言) |
|
快速中断响应和处理 |
|
统一存储器编程模型 |
|
2.舵机(6个) |
|
质量60g
产品尺寸40x20x40.5mm |
|
3.六路舵机驱动板 |
|
4.机械臂硬件结构 |
|
5.7.4V 2200mah可充电锂电池,续航180分钟(带充电器) |
- 上一篇:开源视觉抓取移动机器人(基于深度学习)
- 下一篇:桌面六轴机械臂创新开发平台


