

桌面六轴机械臂创新开发平台
发布日期:2020-04-01 浏览次数:3404
产品概述
桌面六轴机械臂创新开发平台是外形小巧、速度快、重复定位精度高、使用简单、二次开发性强的教科研平台。其提供串口、网络、IO等丰富的通讯方式,支持ROS、Python、C++进行二次开发,重复定位精度可达0.1mm,可搭配简单易用的可视化交互软件和仿真平台,可支持多种便捷切换的末端执行器。能够作为自动化、机械电子工程、机器人工程、智能制造工程等专业的机器人相关课程平台,也可以作为大学生创新活动实践平台,应用在上下料、分拣、装配等项目中。

功能特性
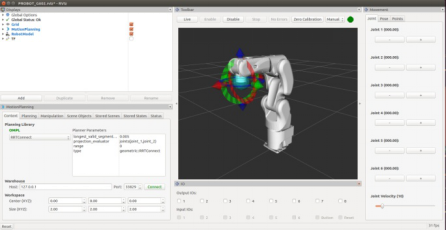
虚拟化平台支持 -机械臂具备完整URDF模型描述,支持ROS、Matlab和CoppeliaSim进行仿真分析和实时监控。
拖动示教 –机械臂可通过拖动三维模型关节实现在线示教功能,并且机械臂位置姿态可以在Rivz中实时显示。
点动控制 – 机械臂上位机支持点动控制,可实现对关节及姿态的点动,自由调整机械臂的姿态。
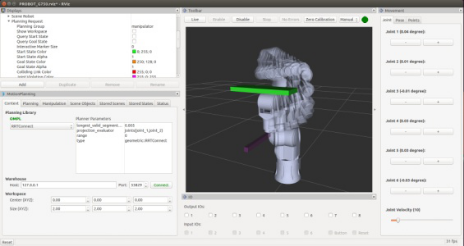
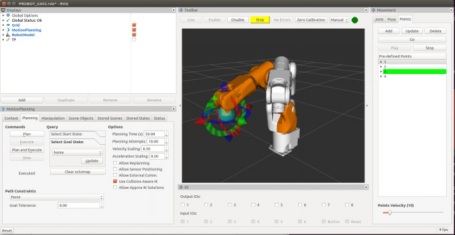
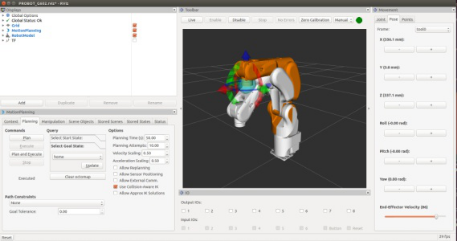
避障规划– 机械臂支持动态避障,通过路径规划实现自动避开机械臂周围的障碍物。
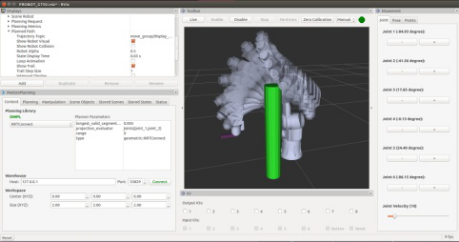
碰撞检测 – 机械臂支持在工作空间中添加障碍物模型,并可以在Rviz和Gazebo里实时查看碰撞区域。

视觉抓取 – 机械臂支持通过RGBD进行物理环境中物体的识别、定位和抓取。
应用专业
自动化、机械电子、机械臂工程、机器人工程、智能制造
应用课程
《机器人学导论》
《机器人控制系统》
《机器人操作系统》
《机器人建模、仿真与编程》
《机器人驱动与控制》
《人工智能技术》
《机器视觉与机器人控制》
《移动机器人技术》
《工业机器人应用》
《机器学习》
《智能控制与无人系统》
《机器人网络控制技术》
支持实验
实验一认识机器人
实验二ROS基础原理
实验三ROS话题与服务编程
实验四基于ROS的机械臂远程控制
实验五机械臂URDF建模
实验六搭建机械臂Gazebo仿真环境
实验七ROS MoveIt机械臂运动编程
实验八机械臂物体抓取
实验九基于视觉的物体识别
实验十机械臂视觉分拣
实验十一基于视觉的动态避障抓取
实验十二智能分拣系统综合实验
性能指标
1. 机械臂本体
|
机械臂类型 |
六轴 |
||
|
轴 |
运动范围 |
最大转速 |
|
|
第1轴 |
±170° |
370°/s |
|
|
第2轴 |
±110° |
370°/s |
|
|
第3轴 |
+40°~ -220° |
430°/s |
|
|
第4轴 |
±185° |
300°/s |
|
|
第5轴 |
±125° |
460°/s |
|
|
第6轴 |
±360° |
600°/s |
|
|
电源电压 |
220V/110V |
重量 |
28KG |
|
重复定位精度 |
±0.1mm |
结构形式 |
串联 |
|
电源电压 |
220V/110V |
减速装置 |
谐波减速 |
|
最大工作半径 |
540mm |
额定负载 |
2KG |
|
电机类型 |
伺服电机 |
控制器 |
ROBCELL A1 |
2. 控制器参数
|
控制系统型号 |
GuYueInvent ROBCELL A1 |
|
主控芯片 |
Xilinx Zynq |
|
主控架构 |
ARM + FPGA异构SoC平台 |
|
可编程逻辑单元 |
85K,约130万ASIC门 |
|
控制软件 |
ROS Kinetic/Melodic |
|
以太网接口 |
1000Mbps |
|
控制方式 |
PC端图形界面/程序控制 |
|
电源电压 |
24V DC |
|
支持控制轴数 |
4~6 轴 |
|
脉冲输出模式 |
方向/脉冲 |
|
脉冲位数 |
32~64(硬件可配置) |
|
外形尺寸 |
163mm*108mm*31mm |
|
二次开发接口 |
C++、Python |
|
通信接口 |
RS232、Ethernet、I/O、RS485、CAN |
|
配套例程 |
图像识别、物体分拣、语音控制、机器学习(均提供源码) |
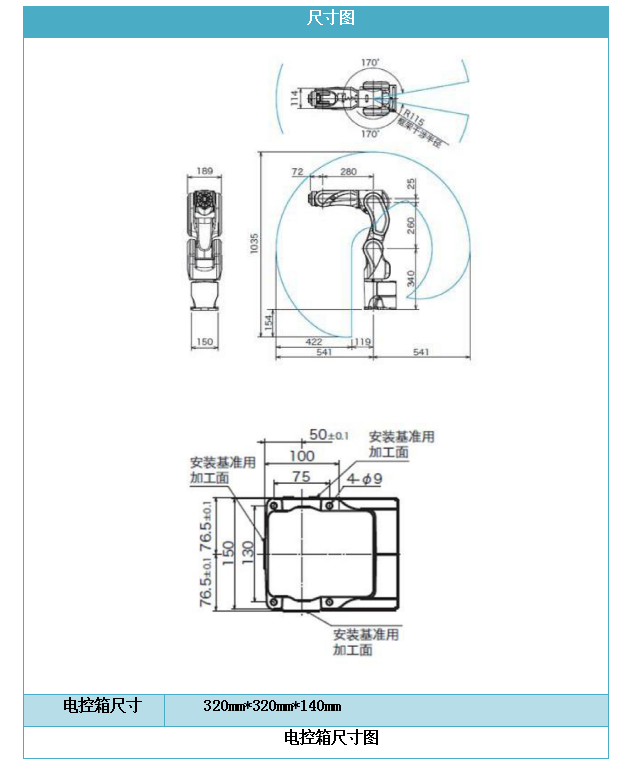
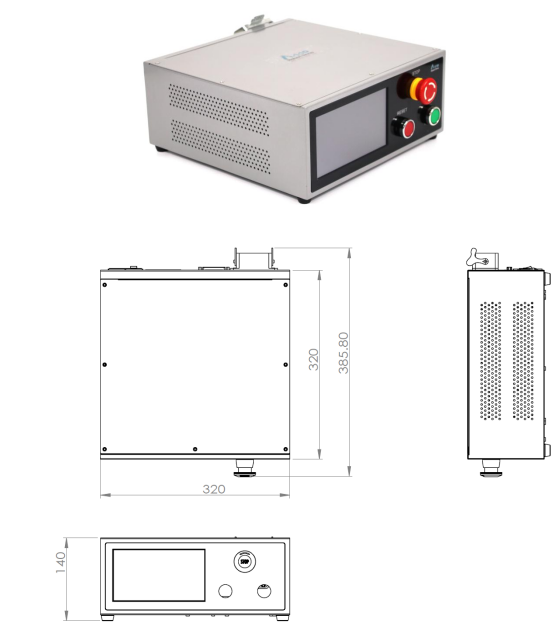
3.结构尺寸
- 上一篇:机械手
- 下一篇:无


