SCI论文:A novel model-based robust control design for collaborative robot joint module
发布日期:2022-05-13 浏览次数:2536
论文名:A novel model-based robust control design for collaborative robot joint module
期刊索引情况:SCI 影响因子:1.762
收录于:Proceedings of the Institution of Mechanical Engineers, Part C:Journal of Mechanical Engineering Science
论文内容简介:
为了减少负载和系统参数变化对协作机器人关节模块动态性能的影响,本文提出了一种新型的鲁棒控制算法来解决协作机器人关节模块轨迹跟踪的动态控制问题。该控制器由两部分组成:一部分是基于动力学模型设计的名义控制项,旨在稳定名义机器人系统;另一部分是基于李亚普诺夫方法的鲁棒控制项,旨在消除不确定性对跟踪性能的影响,其中不确定性包括非线性摩擦、参数不确定性和外部干扰。采用Lyapunov最小化方法来证明系统是均匀有界和均匀最终有界的。我们在实际的协作机器人关节模块实验平台和快速控制器原型cSPACE的基础上进行了数值模拟和实验验证。数值模拟和实验结果表明,该控制器对协作机器人关节模块具有良好的控制性能,在不确定因素的影响下能提供更精确的轨迹跟踪。
论文研究背景
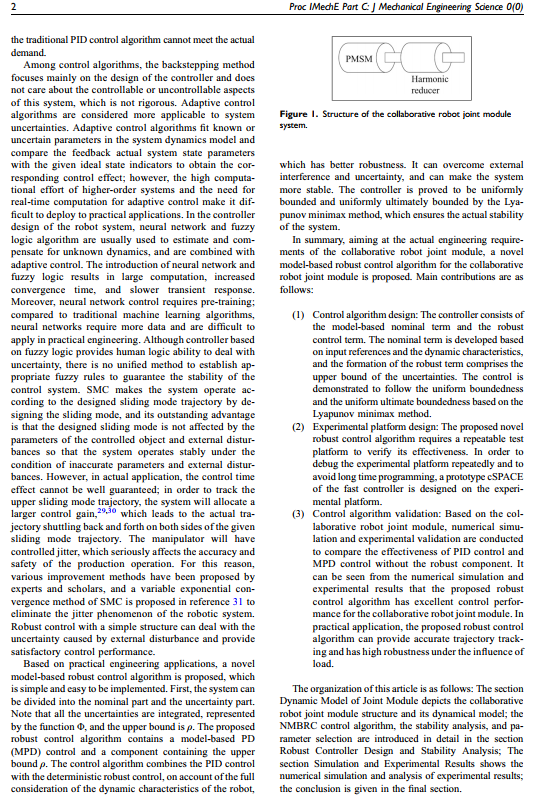
近年来,协作机器人技术发展迅速,应用领域也越来越广泛,如机器人焊接、喷涂、消费电子(3C)行业、搬运重物、装配等。协作机器人关节模块是协作机器人的重要组成部分,其性能直接影响到协作机器人的控制效果。通常情况下,协作机器人关节模块由永磁同步电机和谐波减速器组成,由输入的电信号控制,能够快速响应。它具有结构紧凑、运行稳定、易于控制等 优良特性,已被广泛应用于协作机器人的各个领域。
外部干扰和不确定性是影响协作机器人关节模块的主要因素,而且不确定性是时变的、未知的。例如,电枢反应的非线性,惯性矩和相位电阻的变化,谐波减速器的齿轮间隙和摩擦力的不确定性等。因此,联合模块系统实际上很复杂,容易受到不确定性的影响。在实际工程中,如何处理不确定因素和外部干扰的影响,实现协作机器人关节模块的高性能轨迹跟踪控制是一项具有挑战性的任务。
论文工程应用价值
1) 控制算法设计:控制器由以下部分组成,基于模型的名义项和稳健控制项。名义项是基于输入参考和动态特性开发的,稳健项的形成包括不确定因素的上限。基于Lyapunov minimax方法,控制被证明是遵循统一有界性和统一终极有界性的。
2) 实验平台设计:提出的新型鲁棒控制算法需要一个可重复的试验平台来验证其有效性。为了反复调试实验平台,避免长时间的编程,在实验平台上设计了快速控制器的原型cSPACE。
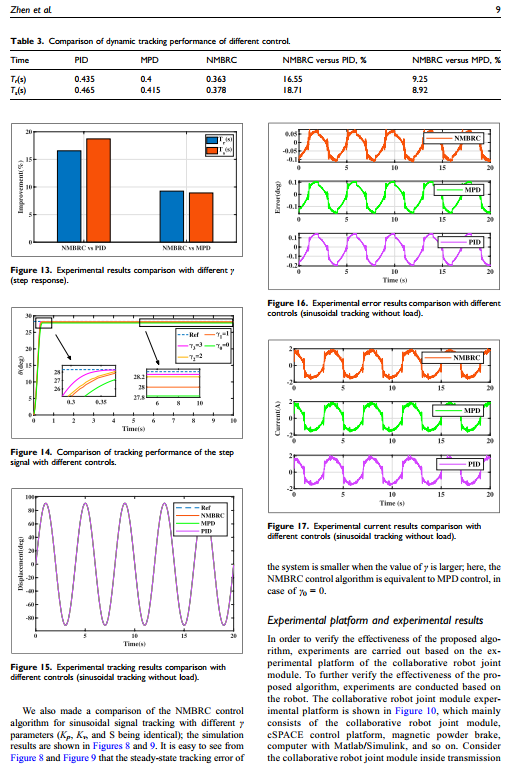
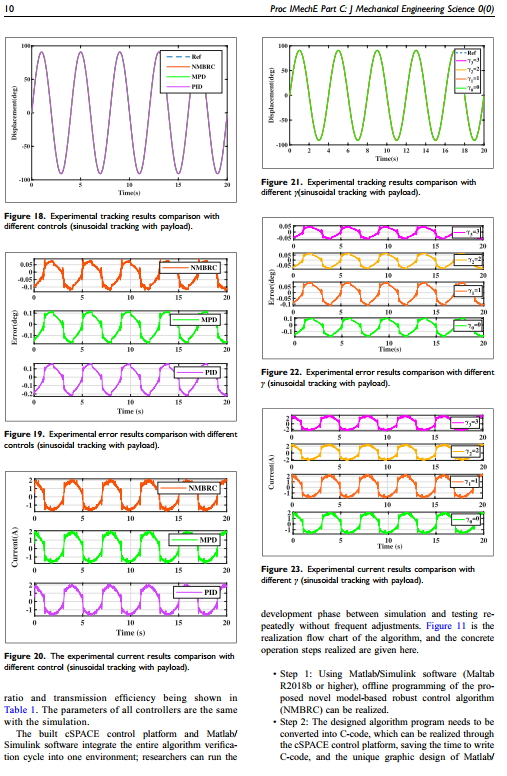
3) 控制算法的验证:在协作机器人关节模块的基础上,进行数值模拟和实验验证,比较PID控制和无鲁棒组件的MPD控制的效果。从数值模拟和实验结果可以看出,所提出的鲁棒控制算法对协作机器人关节模块具有良好的控制性能。在实际应用中,所提出的鲁棒控制算法可以提供准确的轨迹跟踪,并且在负载的影响下具有很高的鲁棒性。
论文依托平台
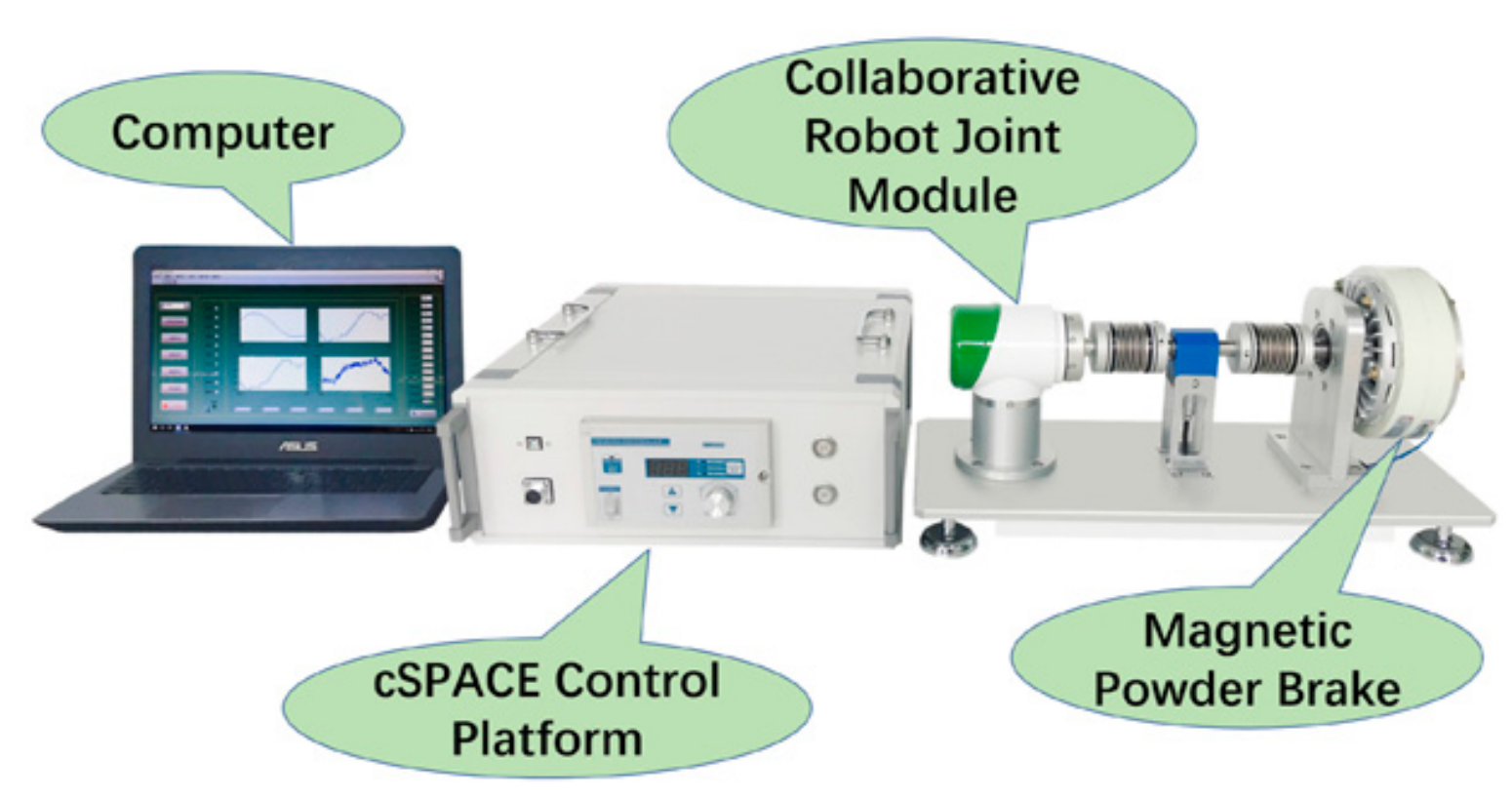
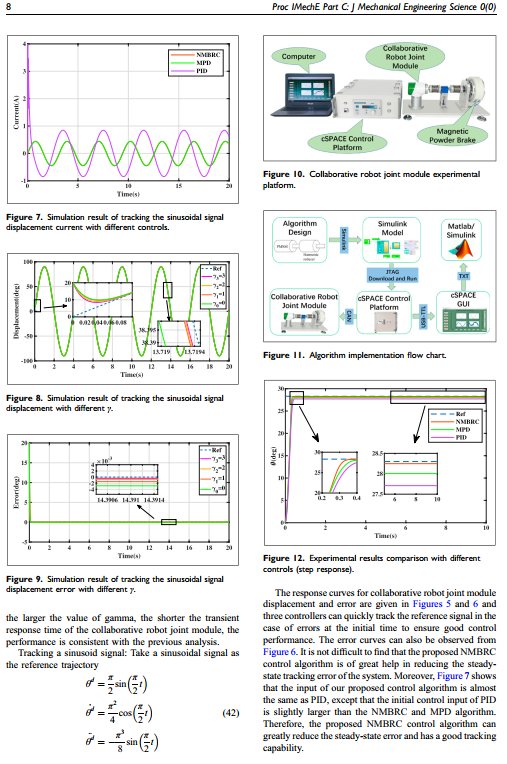
为了验证所提算法的有效性,在协作机器人关节模块的实验平台上进行了实验。为了进一步验证所提算法的有效性,在机器人的基础上进行了实验。协作机器人关节模块的实验平台主要由协作机器人关节模块、cSPACE控制平台、磁粉制动器、带Matlab/Simulink的计算机等组成。
内置的cSPACE控制平台和Matlab/Simulink软件将整个算法验证周期整合到一个环境中,研究人员可以在仿真和测试之间的开发阶段反复运行,无需频繁调整。
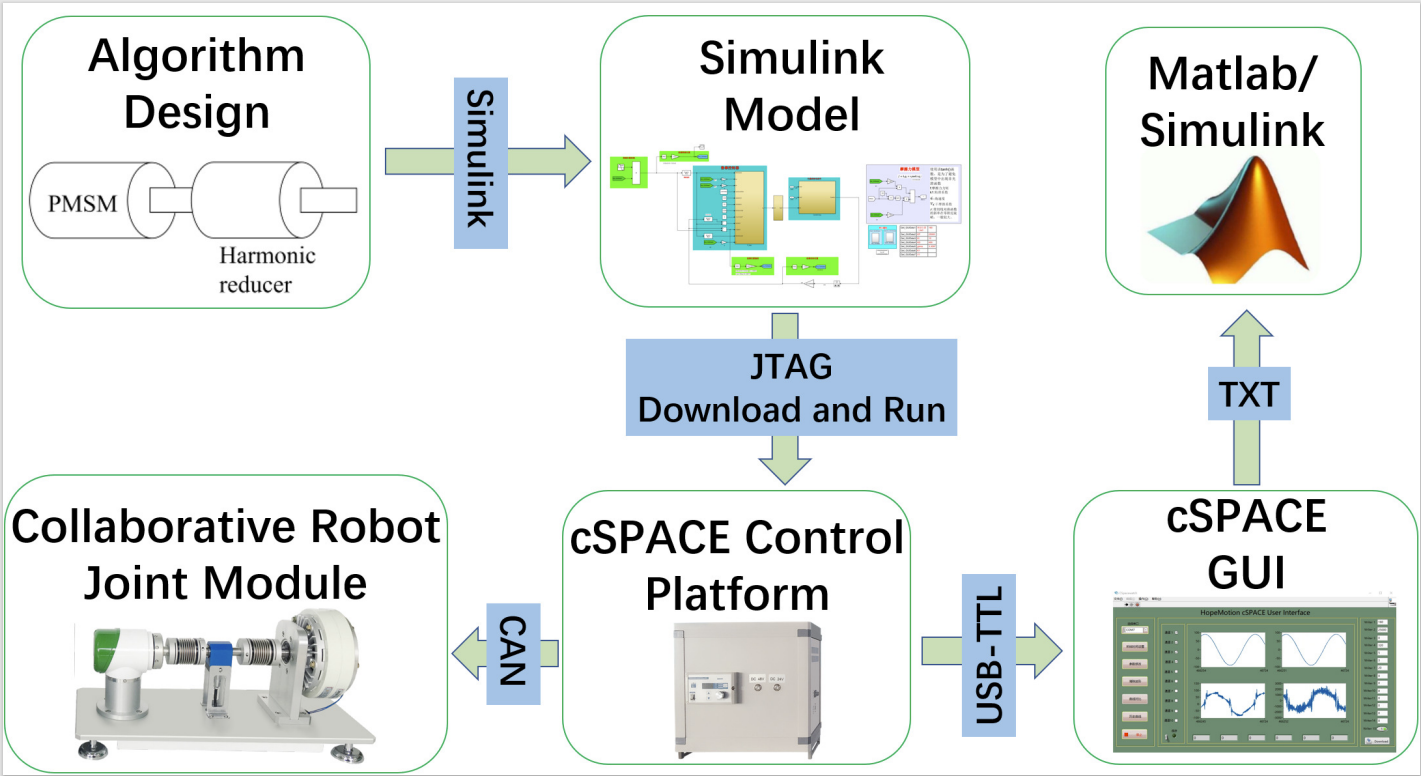
结合CSPACE平台进行科研的步骤如下:
1) 使用Matlab/Simulink软件(Maltab R2018b或更高版本),可以实现所提出的基于模型的新型稳健控制算法(NMBRC)的离线编程。
2) 设计好的算法程序需要转换为C代码,可以通过cSPACE控制平台实现,节省了编写C代码的时间,而且Matlab/Simulink软件独特的图形设计使得算法程序的阅读更加生动直观。
3) 使用Code Composer Studio(CCS)软件,第二步编译的C代码可以通过JTAG下载到数字信号处理器(DSP)控制板。DSP控制板被集成在cSPACE控制平台中。
4) 设计的控制算法由DSP(TMS320F28335)实时控制,指令周期为6.67ns,TMS320F28335的高速处理能力为150MHz(在线)。
5) cSPACE控制平台通过USB-TTL控制协作机器人关节模块,通过USB-TTL,可以在cSPACE GUI上实时观察到你想要显示的变量。
6) 将cSPACE GUI上显示的变量以TXT格式保存到计算机上,然后用Matlab/Simulink软件的M代码对保存的TXT文件进行分析处理。
由于实验平台和控制器的复杂性,我们采用快速控制器原型cSPACE作为开发硬件工具,cSPACE系统可以用来反复调试实验平台,避免了长期编程。它为控制算法的验证提供了一个有效的开发平台。这些算法是通过Matlab/Simulink中的图形方法开发的,可以在线自动生成代码。上述技术为研究人员提供了一个设计和验证算法的良好工具。
论文主要内容