

华中科技大学教授杨文玉 | 机器人运动学中的几何与代数问题
发布日期:2022-11-08 浏览次数:3220
在美国,科学、技术、工程和数学(STEM)教育被视为确保国家成功未来的重要一步。基于现实世界中的问题开发的STEM课程,可以使课程更贴近学生和教师。对于更优质的STEM教育的迫切要求主要基于以下因素的考虑:许多职业现在需要一支能够参与STEM思维和技能的劳动力,机器人教育研究对创造力,创新,批判性思维,解决问题,信息和媒体素养的要求变得愈发重要。而STEM课程能比较好的培养这些素养,并为学生从事STEM相关领域的工作打下基础。
机器人技术被看作STEM教育的重要组成部分,因为它向学生介绍了复杂的数学和科学思维。机器人学可以成为学习应用数学概念,科学探究方法和解决问题的途径。机器人教育方案以模拟人类的运动,并允许学生发展抽象的心理表征、数学思维。此外,当学生遇到具有挑战性和复杂的学习场景时,机器人的使用可以提高学生的积极性和耐心性。
机器人设计的过程
01 确定机械机构运动链的拓扑;
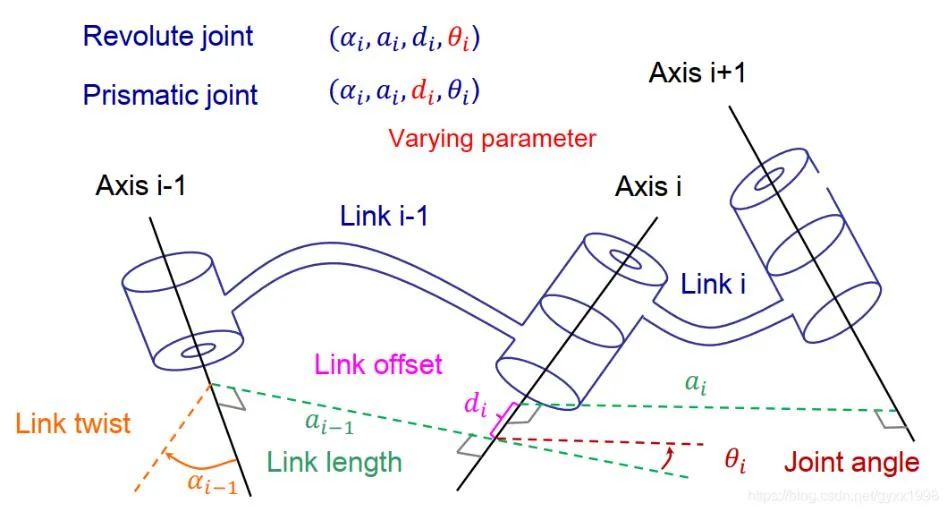
02 确定定义机器人结构的各个连杆的几何尺寸、DH参数,以满足工作空间要求;
03 确定各连杆和关节的结构尺寸,以满足静态、动态负载的要求;
04 确定整个机械机构(包括驱动器动力学)的弹性动力学尺寸,以避免在特定的操作条件下出现激振频谱;
05 选择驱动器及其机械传动装置,以适应各种作业条件,应对任务的不确定性。
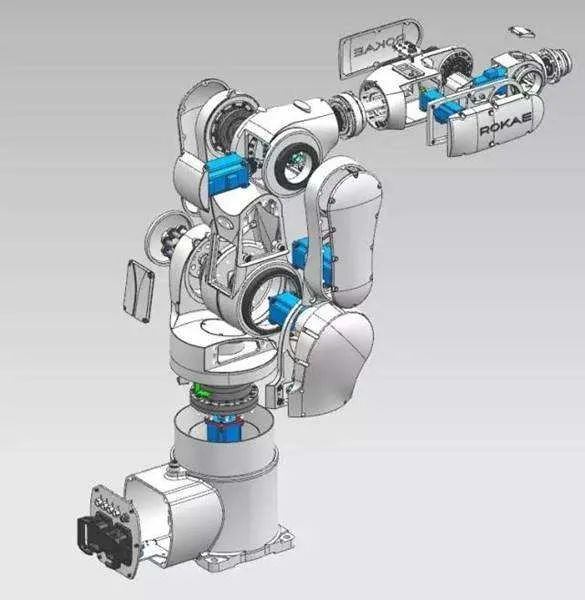
机械臂爆炸图
机器人运动学
机器人运动学是研究机器人动力和运动的科学,包括对机器人系统的建模,空间分析,运动分析,插补和运动控制,它仅研究机器人系统在某一空间中的运动情况而不考虑其受力情况。常见的机器人运动处理方法有“欧拉角法”和“四元数法”,其本质都是在机器人的身上设立若干“参考点”和系统坐标系,并将某一个外界的系统设立为参考坐标系,通过系统坐标系和参考坐标系之间的矩阵变换从而达到将参考点移动到期望的位置上的方法。机器人运动学是目前机器人研究中的热点话题,目前前沿的研究方向是:软体机器人运动学,水下机器人运动学,空间机器人运动学,仿生机器人运动学等。机器人运动学是让机器人“动”起来的基础,也是人们实现“控制”机器人的基础,随着科技的发展,我们不能仅仅局限于让机器人动起来的要求,我们要让机器人知道如何动,怎么更安全,更有效率的动,怎么动的精准,精确,这也是机器人运动学所要解决的问题。而运动学中的几何问题和代数问题是机器人运动学求解的重中之重。
通过前面的介绍,
我想大家也应该对机器人运动学有所了解了
今天给大家推荐华中科技大学杨文玉教授的机器人运动学的专栏课程【机器人运动学中的几何与代数问题】。
内容涵盖:相关背景、运动学装置设计、几何与代数问题
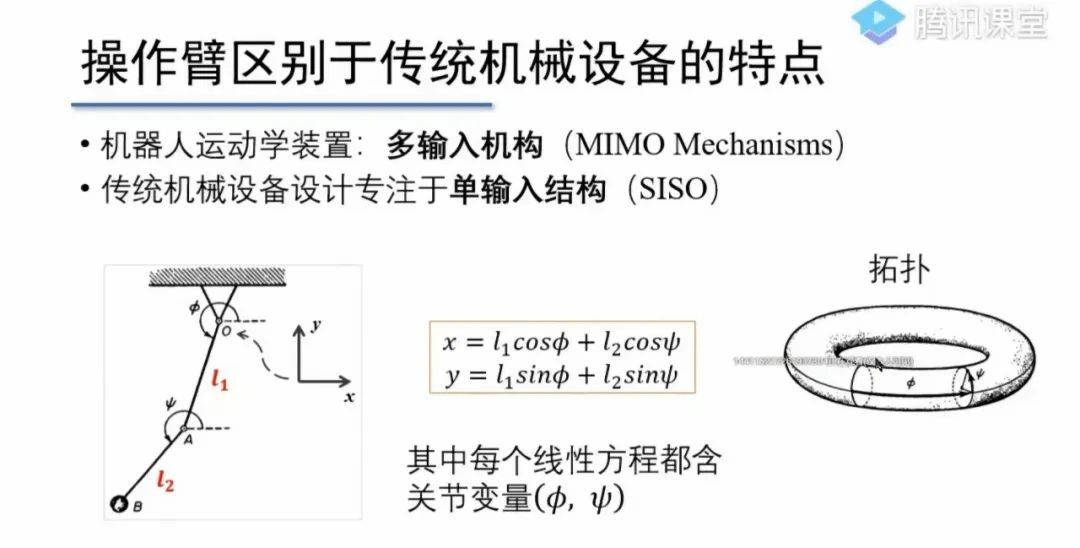
01 操作臂区别于传统机械设备的特点
02 感知-动作系统涉及的几何与代数框架

精彩呈现
如果你也对机器人感兴趣,
如果你想了解机器人运动学的知识,
深谷小助一起学习吧!

杨文玉
华中科技大学教授,博导
课纲简介
·相关背景
·运动学装置设计
·几何与代数问题
深谷学院
深谷学院是高品质的免费开放的人工智能与机器人专属学习平台,联合国内外多名教授、专家学者、资深工程师,提供线上线下专业的机器人、人工智能、智能制造相关课程。线上线下累计学习人次达50万人次。
深谷学院致力于赋能开展人工智能与机器人产业化应用的中高端人才培养,搭建中高级产业人才培养赋能生态,服务中国教育。
深谷学院 (eduvstc.cn)


