精品课程推荐 | 机器人动力学理论及其应用
发布日期:2022-11-15 浏览次数:2385
机器人广泛的应用于生产生活各个领域,其普及程度决定了一个国家的加工制造水平的高低。因此,国内外众多专家对机器人相关领域进行了深入研究,尤其是针对系统动力学的建模,对机器人动力学控制领域有着极其重要的现实意义。系统的运动学分析是一种几何方式,并不考虑产生运动的力和力矩,而动力学方程则阐述了力和运动之间的关系,让控制可以更加精确,以满足机器人实际需求。
机器人的运动分析包括运动学分析和动力学分析。机器人的运动学描述的是机器人末端和各个关节位置的几何关系,而动力学描述的是各动态参数和力矩之间的关系。对于机器人控制来说,电机的力矩作为输入,末端的位置作为输出,在控制上,分为非集中控制(uncentralized control)和集中控制(centralized control)。
机器人运动学模型是任务逆解和动力学计算的基础,而动力学模型是动力学控制和规划的基础。本课程首先介绍了机器人动力学理论研究的重要性,指出动力学是机器人控制的四层塔式架构的基石,同时与机器人系统辨识是规划与控制的重要基础,动力学在提升整体控制性能具有重要意义。随后详细介绍了动力学建模、参数辨识和轨迹规划等理论研究,以及现如今在机器人上的实际应用和所存在的问题。
01 课程及平台介绍

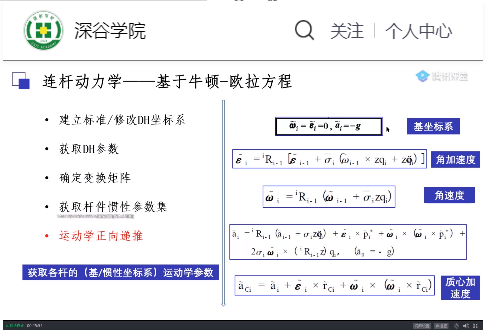
本课程重点对机器人动力学参数辨识、动力学与轨迹规划、动力学与位置控制等方面内容做了介绍。如介绍连杆动力学模型时,选取了基于牛顿-欧拉方程和基于线性分离方法进行了理论介绍。
课程内容
1、机器人动力学建模
2、机器人动力学参数辨识
3、机器人动力学与轨迹规划
4、机器人动力学与位置控制
5、机器人动力学与柔顺控制
适合人群
· 人工智能、机器人、自动化、控制工程、机械电子、智能制造等专业的全国高校教师、研究生
· 帮助科研院所的科研人员、教师拓宽知识领域
· 机器人相关企业技术负责人/工程师
课程特点
本课程主要是对机器人动力学理论及其应用展开了较为深入的讨论。首先介绍了什么是机器人动力学及其重要性,机器人动力学方程描述了系统与环境的交互的演变规律,机器人动力学在提升整体控制性能具有重要意义。同时,也提出了机器人动力学的窘境,对于初学者而言动力学理论复杂,较难理解,熟悉完理论后,又不知如何将其运用到实际工作中。
针对上述问题,课程从机器人动力学建模、动力学参数辨识、动力学与轨迹规划、动力学与位置控制和动力学与柔顺控制这五个方面进行了具体讲解,首先介绍各部分的理论知识,包括方程参数含义以及推导过程,之后结合具体的例子介绍理论应用。
在课程的最后,主讲老师还对同学们提出的典型问题进行了答疑,主要问题是各部分内容之间的一些联系。同时也对一些新兴研究方法提出了独特的见解,帮助学习者理清机器人动力学理论的主要脉络。
期望大家通过本课程的学习,能够对机器人动力学有更清楚的了解,对于一些典型的机器人模型,可以对其进行运动学建模,得到运动学方程,从而更好对机器人进行位置控制和柔顺控制研究。
精彩内容
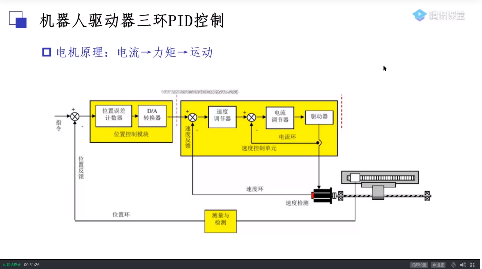
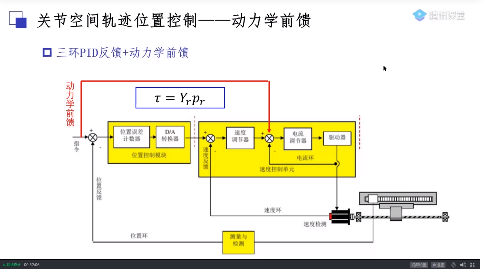
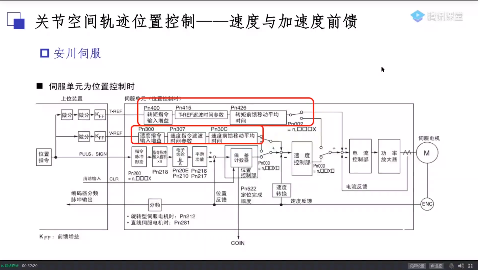
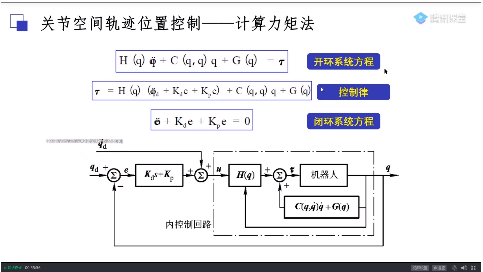
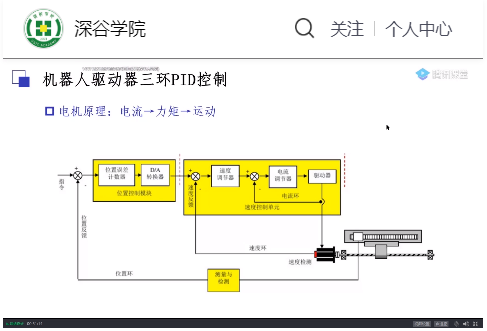
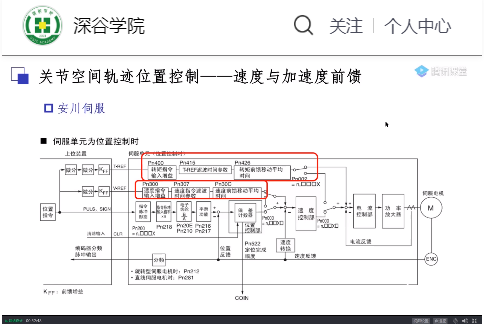
在进行了机器人动力学建模和轨迹规划之后,我们可以进一步对机器人进行动力学位置控制研究。常见控制方法有较为经典的机器人驱动器三环PID控制,对于机器人关节空间轨迹位置控制有三环PID反馈加动力学前馈以及速度与加速度前馈等方法。但是PID控制在位置控制稳定性上无法进行理论证明,因此提出了一种计算力矩法,并介绍了开环系统方程和控制率,推导出闭环系统方程,在理论上对其控制方法的稳定性做出证明。