深谷技术 | 基于多传感器信息融合的智能跟踪机器人及其控制方法
发布日期:2022-11-24 浏览次数:2869
随着科学技术的进步,各高性能传感器、处理器被广泛应用于移动机器人领域,使其逐渐成为了集环境感知、动态决策和行为控制为一体的综合智能体。在工作、生活、娱乐过程中的许多场景,都存在着某个载体跟随人类运动的情况,如机场的行李箱、广场上的婴儿车、超市购物车、高尔夫球场小车及工业生产中的物流小车等。如果能够研制一种在多场景下的智能跟随的机器人,将能够解放人的双手,使人享受到智能跟随机器人带来的便利。
但现有的智能跟随技术大多是利用GPS定位或视觉跟踪,但二者都存在着一定的弊端。如GPS定位只适用于室外场景,且民用精度不高;而视觉跟踪受环境影响较大,识别精度不高,且受视距传播限制,无法解决狭小空间的直角转弯问题。仓储物流系统常用的AGV小车只能按照固定路线行驶,智能化程度不高。
为了克服上述缺陷,本文介绍了一种发明专利,提供实现机器人的智能跟随、且解决狭小空间的直角转弯问题、适用于室内、室外多场景的基于多传感器信息融合的智能跟随机器人及控制方法。
为实现上述目的,本发明所采用的技术方案为:
一种基于多传感器信息融合的智能跟踪机器人,包括机器人本体和人体携带模块,其特征在于:所述的机器人本体包括机器人主控单元、测距传感器,所述的人体携带模块包括携带端主控单元、导航模块、通信模块,导航模块集成有陀螺仪、加速度计和地磁场传感器,机器人本体接收到蓝牙传输的人体携带端姿态数据,融合测距传感器信息,将控制指令发送给驱动器,由驱动器控制驱动前轮前进、后退与转向。
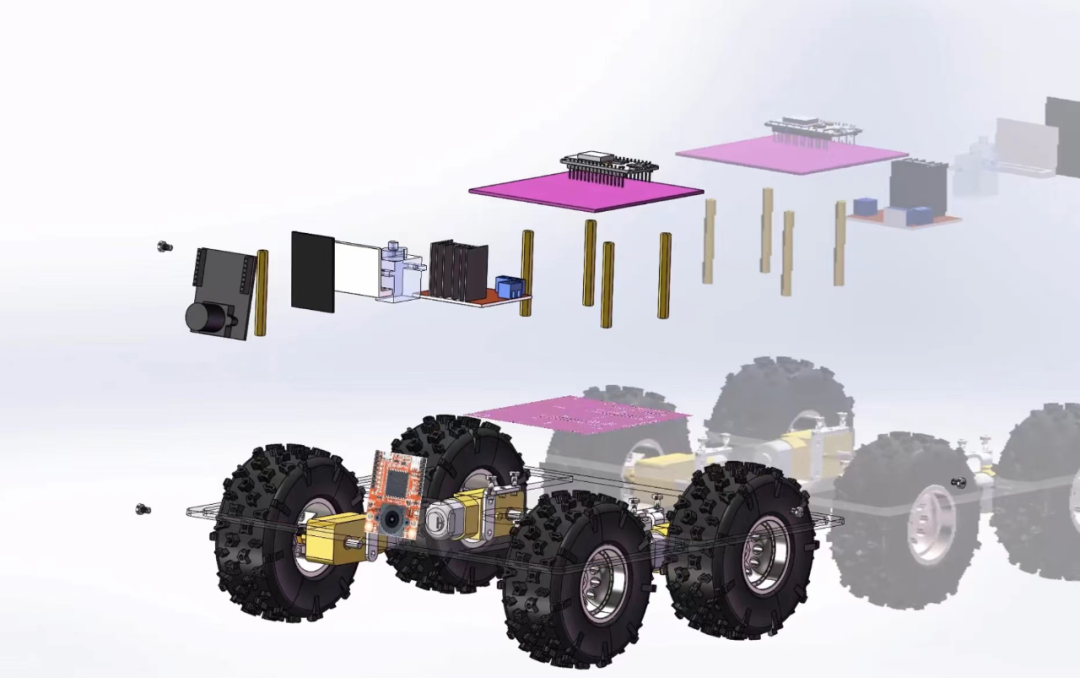
跟踪机器人硬件组成
所述的蓝牙模块、WIFI模块、ZigBee模块、RFID模块或红外传感器。所述的测距传感器为超声传感器、红外传感器或激光传感器。以主人随身携带的人体携带模块为跟踪目标,利用磁场传感器、陀螺仪、加速度传感器、测距传感器的信息融合,确定主人与机器人本体的相对位置,运用通信模块传输给机器人主控单元,通过驱动器控制电机转动,从而实现机器人跟随主人前进、转弯与后退。
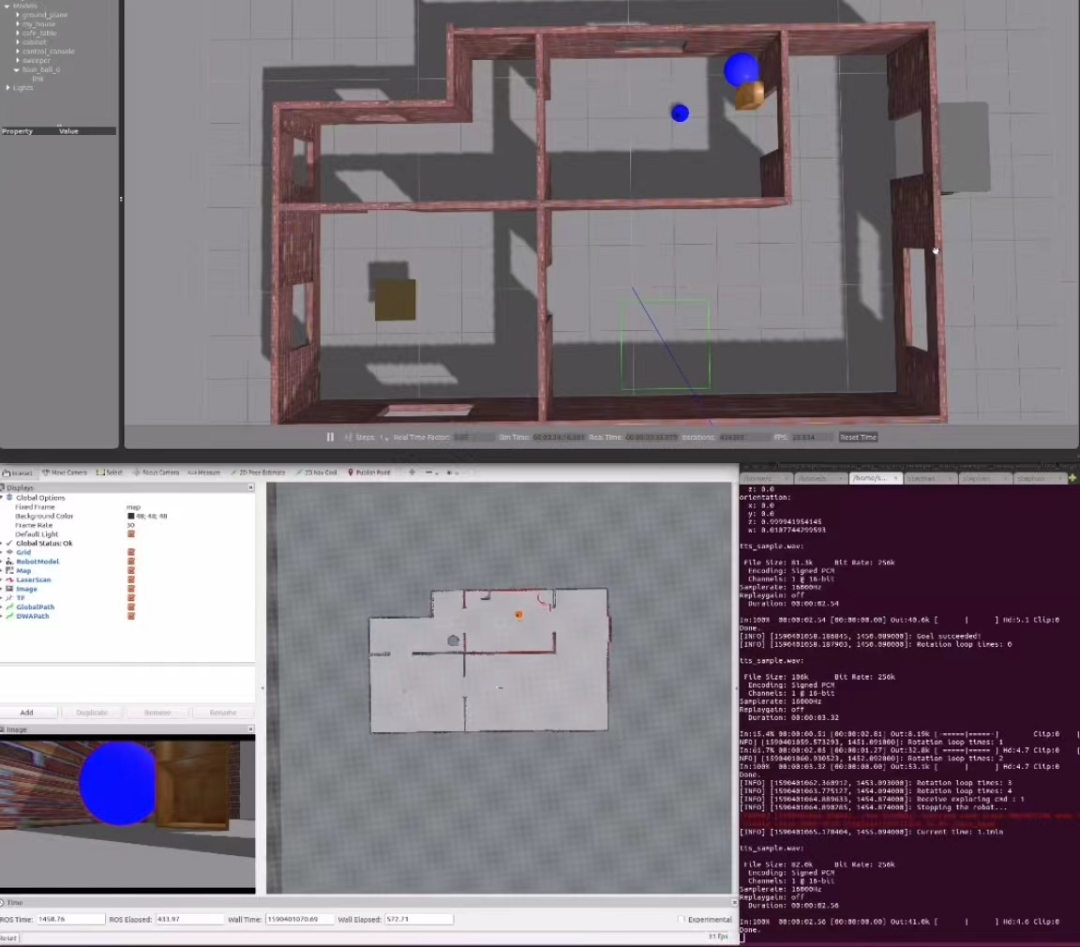 目标识别软件仿真
目标识别软件仿真
控制方法方面,使机器人端控制单元、驱动器、电机、测距传感器处于工作状态,并使陀螺仪与通信模块开始工作;由测距传感器检测到主人与机器人本体之间的距离,导航模块集成陀螺仪、加速度计和地球磁场传感器,采用高性能的微处理器和先进的动力学解算和卡尔曼动态滤波算法,能够实现快速获得人体携带模块实时运动状态,通过通信模块实时传输,实时反馈给主控单元。当机器人与主人距离大于一米时,机器人跟随前进,并配有四级调速机制,以实现根据主人行进速度确保机器人有效跟随;当机器人据主人一米时,停止前进,如果角度不变,则机器人保持静止;当机器人距离主人小于0.5米时,机器人倒退行驶;机器人通过超声传感器检测障碍并附有急停功能。
 实物展示
实物展示
相对于现有技术,本发明的有益效果为:
本发明为基于多传感器信息融合的智能跟随机器人,是一个集环境感知、规划决策、自动行驶于一体的综合系统,它集中地运用了计算机技术、传感技术、信息技术、通信技术、导航以及自动控制技术等。智能跟随机器人可适应餐厅、机场、超市、游乐场、公园、海滩、步行街等室内、室外多种环境,真正做到解放人类的双手、双眼,免除人类劳动力,具有广泛的应用、可观的经济效益和较大的社会影响力。
深谷学院
深谷学院是高品质的免费开放的人工智能与机器人专属学习平台,联合国内外多名教授、专家学者、资深工程师,提供线上线下专业的机器人、人工智能、智能制造相关课程与服务。线上线下累计学习人次达20万人次。
深谷学院致力于打造机器人爱好者的开源社区。深谷学院致力于赋能开展人工智能与机器人产业化应用的中高端人才培养,搭建中高级产业人才培养赋能生态,服务中国教育。