

深谷产品课堂——开源直线电机一级倒立摆产品学习和操作
发布日期:2022-11-29 浏览次数:2368
欢迎关注深谷学院《深谷产品课堂》系列文章,在前面课堂中,我们学习了开源六轴协作机械臂的产品操作,本期为大家带来的是开源直线电机一级倒立摆产品学习和操作。
环境版本
· 主机系统版本:Windows10 64位
· 处理器型号:Intel-i7
· Matlab版本:Matlab R2020b
· 人机交互软件(免安装):ProductSoftware
学习目标

知识储备
首先学习直线一级倒立摆结构。
产品包括倒立摆本体、控制系统、人机交互软件、以及相关配线等组件。

2. 倒立摆本体
主要包括直线电机、角度编码器以及摆杆。倒立摆本体尺寸如下图所示。

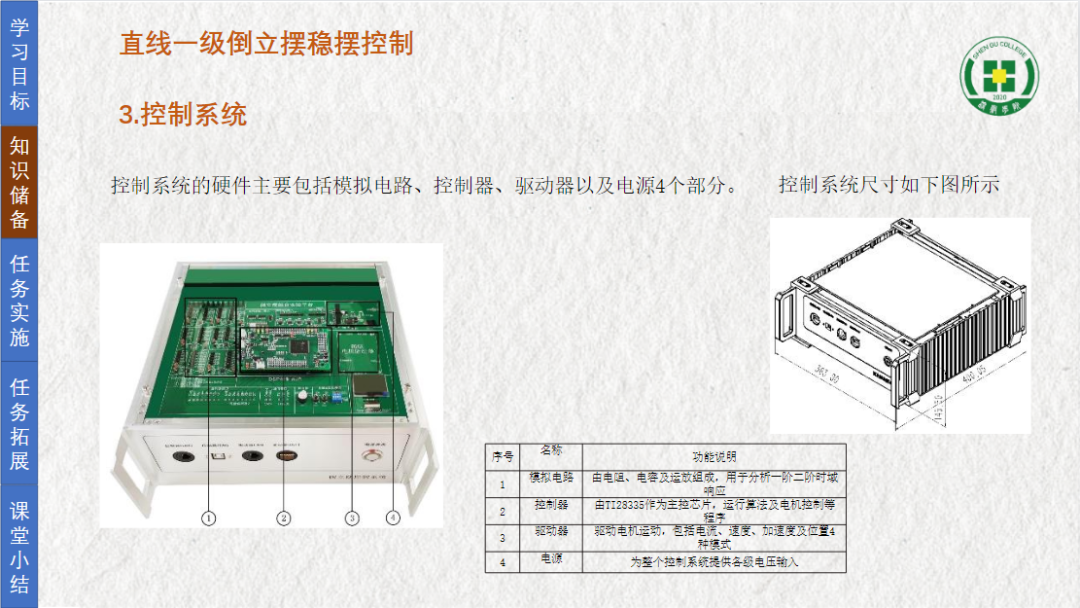
3. 控制系统
控制系统的硬件主要包括模拟电路、控制器、驱动器以及电源4个部分。控制系统尺寸如下图所示。
4. 人机交互软件
该软件集成了我公司多款产品的人机交互功能,适配的产品包括倒立摆系列,电机系列,多轴机器人系列等。

任务实施
任务实施包括以下内容。接下来分别进行讲解与演示。
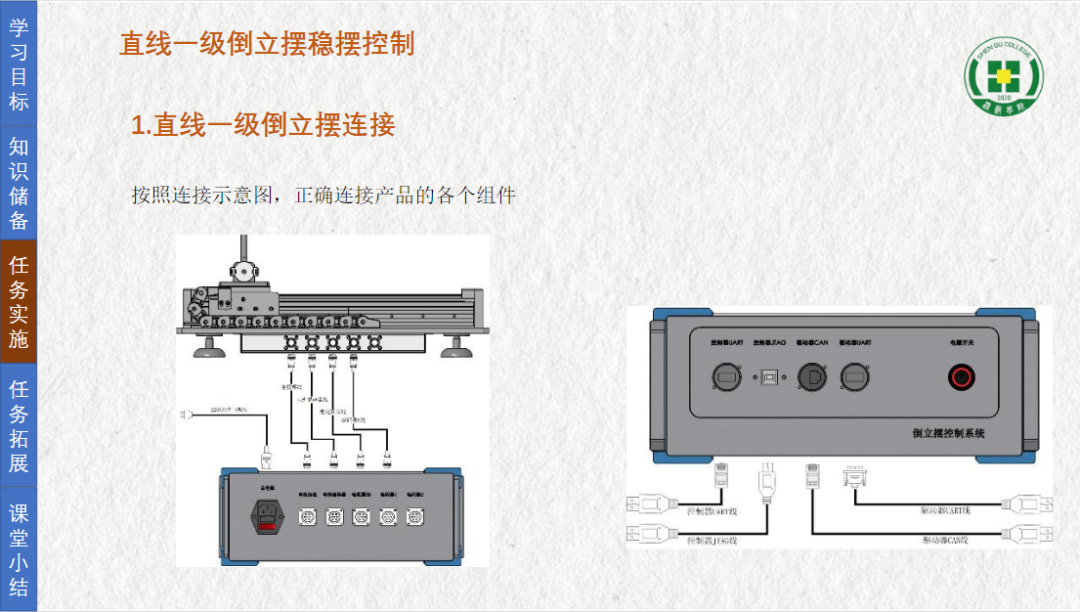
1. 直线一级倒立摆连接
2. 使用MATLAB下载实物控制程序操作步骤
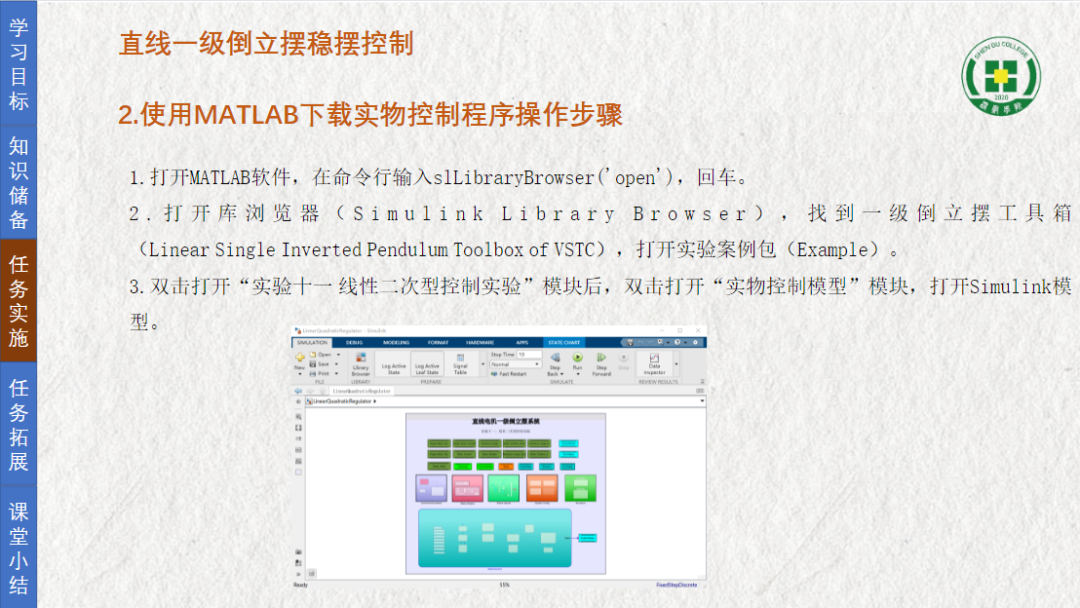
第一步:打开MATLAB软件,在命令行输入slLibraryBrowser('open'),回车。
第二步:打开库浏览器(Simulink Library Browser),找到一级倒立摆工具箱(Linear Single Inverted Pendulum Toolbox of VSTC),打开实验案例包(Example)。
第三步:双击打开“实验十一 线性二次型控制实验”模块后,双击打开“实物控制模型”模块,打开Simulink模型。
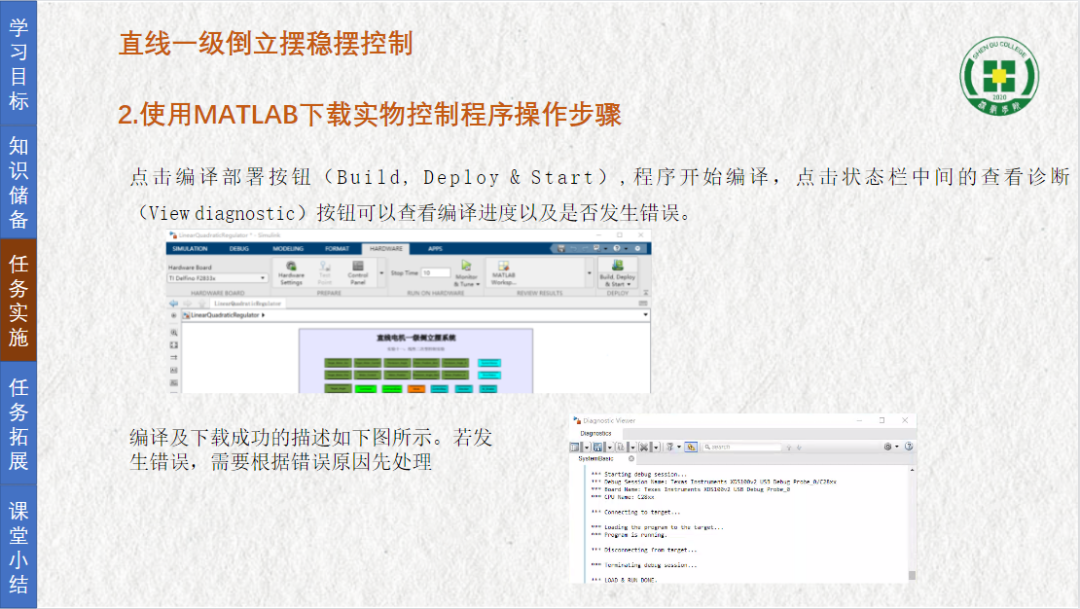
第四步:点击编译部署按钮(Build, Deploy & Start),程序开始编译,点击状态栏中间的查看诊断(View diagnostic)按钮可以查看编译进度以及是否发生错误。编译及下载成功的描述如下图所示。若发生错误,需要根据错误原因先处理
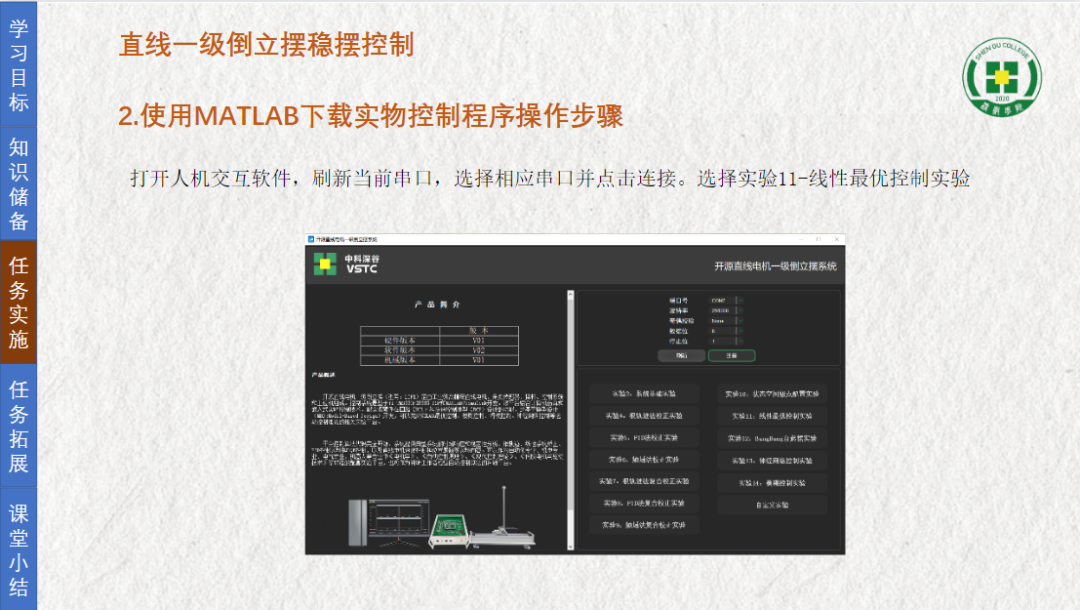
第五步:打开人机交互软件,刷新当前串口,选择相应串口并点击连接。选择实验11-线性最优控制实验。
第六步:点击复位按钮,系统会进入到复位状态(802x),复位完成后,自动回到空闲状态(0000)选择加速度模式,点击启动按钮,系统会进入到启动状态(801x),启动完成后,自动进入到准备状态(1000)点击回零运动按钮,系统会进入到回零运动状态(101x),回零完成后,系统自动回到准备状态(1000)点击开始运动按钮,系统进入到开始运动状态(102x)。
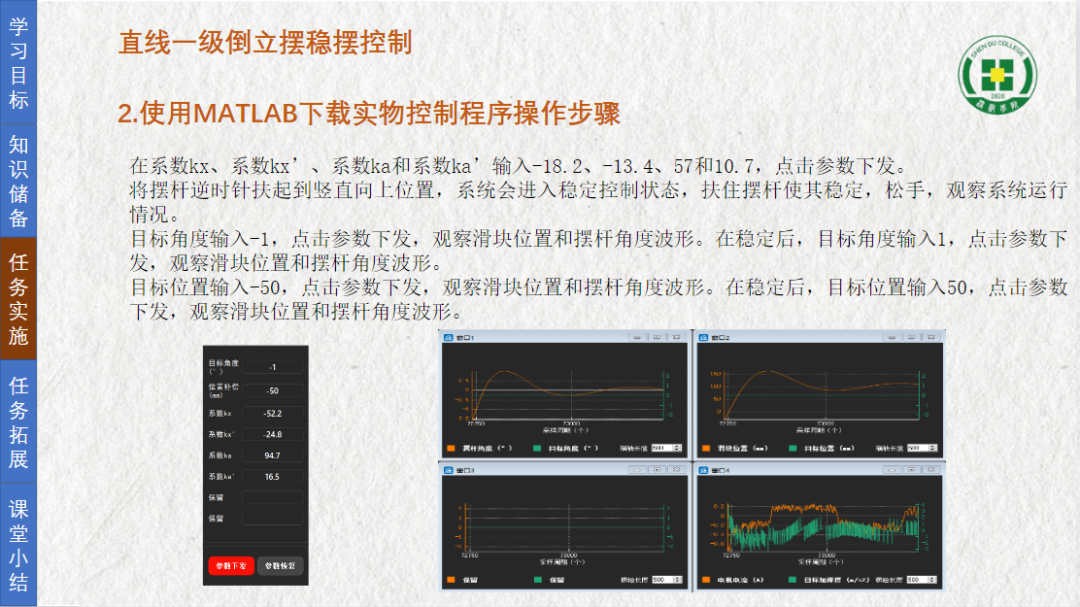
第七步:在系数kx、系数kx’、系数ka和系数ka’输入-18.2、-13.4、57和10.7,点击参数下发。将摆杆逆时针扶起到竖直向上位置,系统会进入稳定控制状态,扶住摆杆使其稳定,松手,观察系统运行情况。目标角度输入-1,点击参数下发,观察滑块位置和摆杆角度波形。在稳定后,目标角度输入1,点击参数下发,观察滑块位置和摆杆角度波形。目标位置输入-50,点击参数下发,观察滑块位置和摆杆角度波形。在稳定后,目标位置输入50,点击参数下发,观察滑块位置和摆杆角度波形。
任务拓展
根据LQR算法,尝试修改状态空间矩阵的值,观察倒立摆摆杆稳定效果。
课堂小结
下面我们进行课堂小结:
1、简述直线一级倒立摆组成以及连接过程。
2、学会使用MATLAB软件进行自动代码生成及下载
3、学会使用人机交互软件进行倒立摆的稳定控制
接下来,深谷小助将会继续分享《深谷产品课堂》的课程,欢迎大家持续关注。


