深谷产品课堂——开源三轴协作机械臂产品学习和操作
发布日期:2022-12-08 浏览次数:3418
大家好,欢迎关注深谷学院《深谷产品课堂》系列文章,在上期的课堂中,我们学习了开源深度学习视觉抓取移动作业智能机器人的操作,本期为大家带来的是开源三轴协作机械臂产品学习和操作。
环境版本
· 主机系统版本:Windows10 64位
· 处理器型号:Intel-i7
· Matlab版本:Matlab R2020b
· 上位机软件(免安装):RobotGUI_DH20220328
学习目标
知识储备
1、学习三轴机械臂本体结构。
三轴机械臂本体由 6 个可重组的关节模组、连接部件、底座、末端部件组成。图从上到下简单地说明了三轴机械臂的两大组成部分。最上面是防撞保护套和连杆,下面是关节模组。其中三轴机械臂本体上有一个EtherCAT接口,对应接线上分布着EtherCAT通讯线和机械臂的电源线。

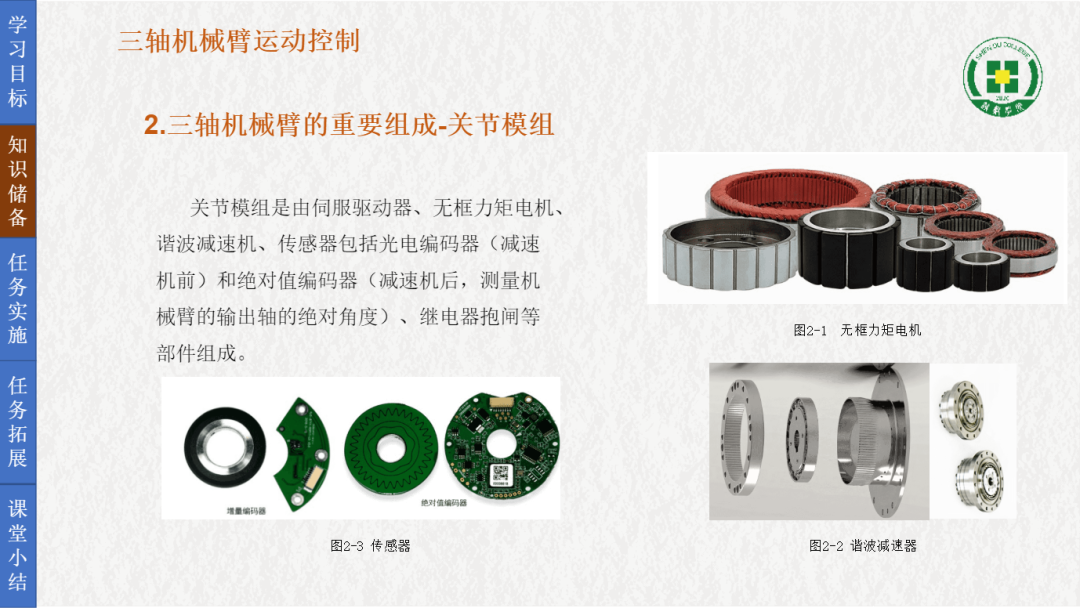
2、三轴机械臂的重要组成-关节模组
关节模组是由伺服驱动器、无框力矩电机、谐波减速机、传感器包括光电编码器(减速机前)和绝对值编码器(减速机后,测量机械臂的输出轴的绝对角度)、继电器抱闸等部件组成
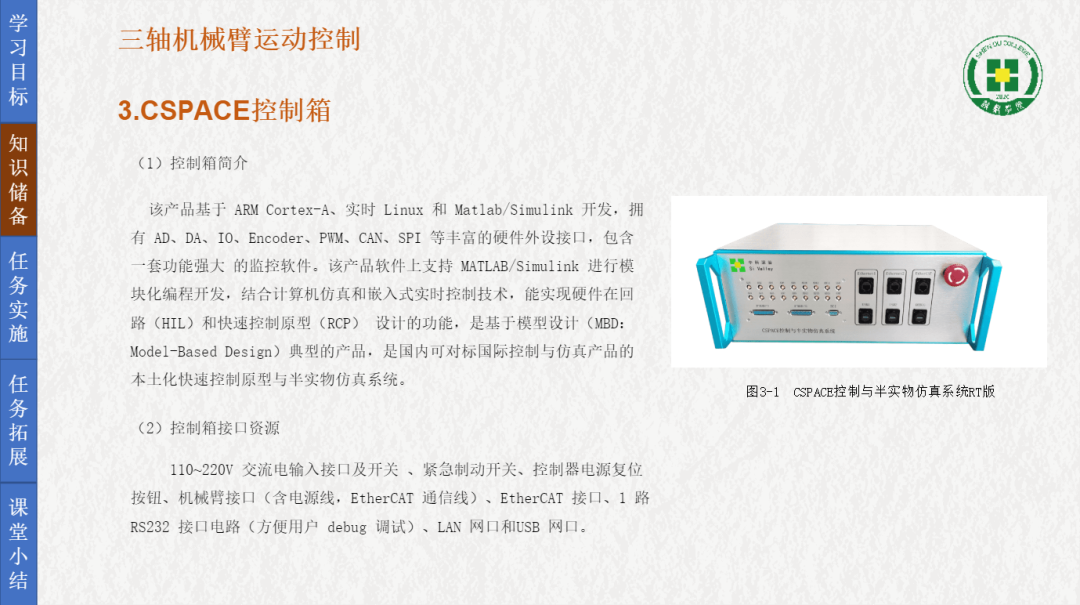
3、CSPACE控制箱
(1)控制箱简介该产品基于 ARM Cortex-A、实时 Linux 和 Matlab/Simulink 开发,拥有 AD、DA、IO、Encoder、PWM、CAN、SPI 等丰富的硬件外设接口,包含一套功能强大 的监控软件。该产品软件上支持 MATLAB/Simulink 进行模块化编程开发,结合计算机仿真和嵌入式实时控制技术,能实现硬件在回路(HIL)和快速控制原型(RCP) 设计的功能,是基于模型设计(MBD:Model-Based Design)典型的产品,是国内可对标国际控制与仿真产品的本土化快速控制原型与半实物仿真系统。
(2)控制箱接口资源 110~220V 交流电输入接口及开关 、紧急制动开关、控制器电源复位按钮、机械臂接口(含电源线,EtherCAT 通信线)、EtherCAT 接口、1 路 RS232 接口电路(方便用户 debug 调试)、LAN 网口和USB 网口。
任务实施
任务实施包括以下内容。接下来分别进行讲解与演示。
1)网线接前面板Etherenet1网口,用于和上位机通讯。
2)USB通信线,接前面板USB调试口(DEBUG),用于调试和监测。
3)机械臂电缆接在后面板Robot接口,里面包含48V电源线和EtherCAT通讯线。
4)线性直流稳压电源三角供电插头,给控制器系统供电。
5)打开急停按钮,给机械臂本体供电。

2、使用上位机软件和Matlab软件下载PTP程序操作步骤
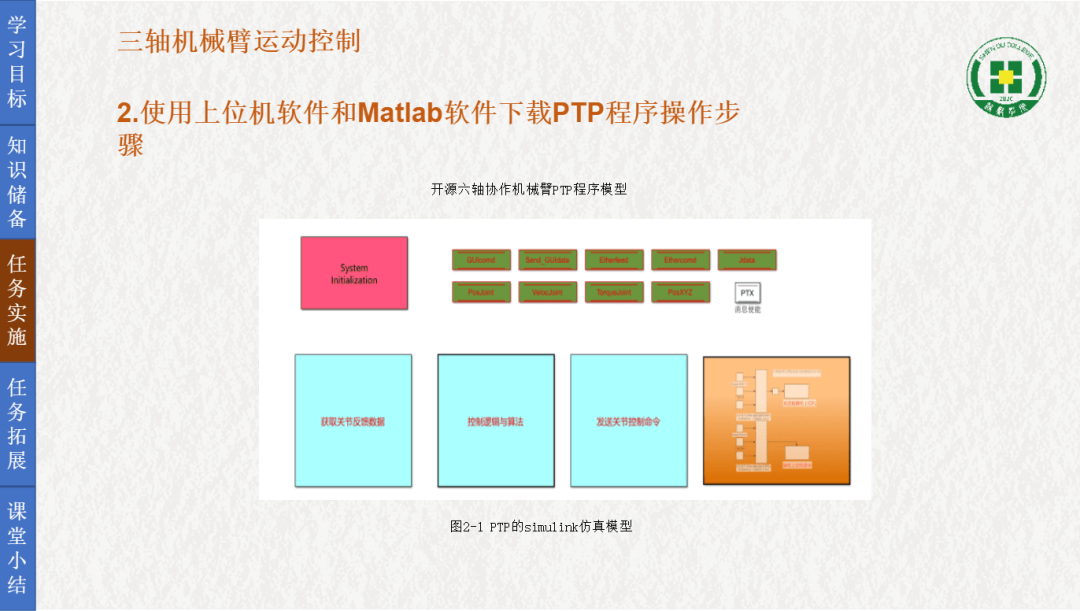
第一步:首先打开PTPTecat.slx,Simulink整个控制框图如图2-1所示。主要包含6部分:全局变量定义部分、系统初始化、上位机指令接收子系统、获取关节反馈数据、控制逻辑与算法、发送关节控制命令。
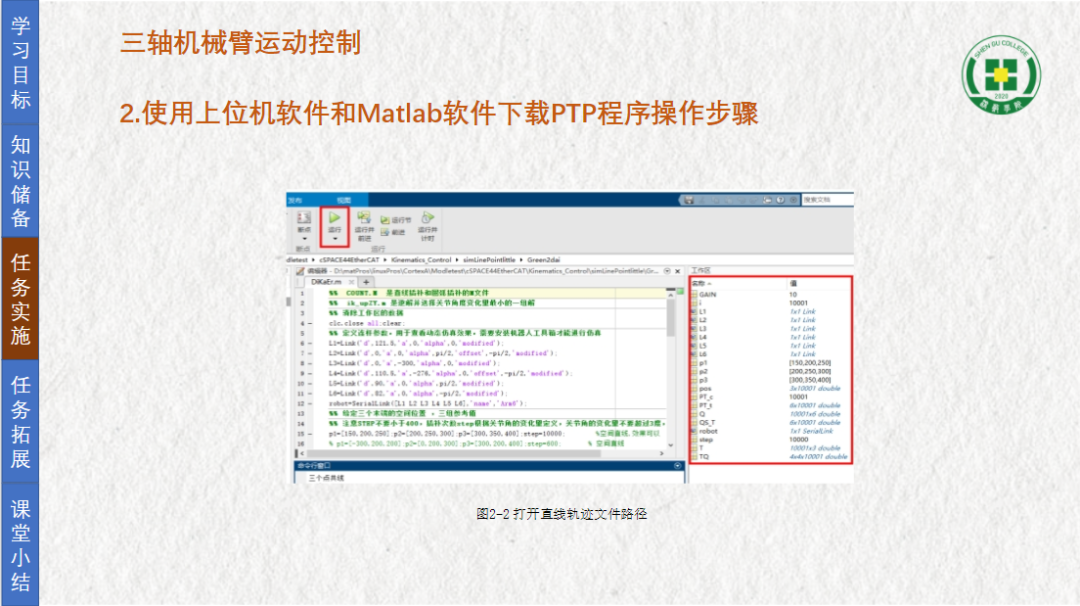
第二步:产生离线仿真数据。需要产生离线笛卡尔空间直线轨迹,,打开文件夹内的DiKaEr.m文件,并点击“运行”,经过一段时间后,在工作区内产生6个关节的轨迹点。
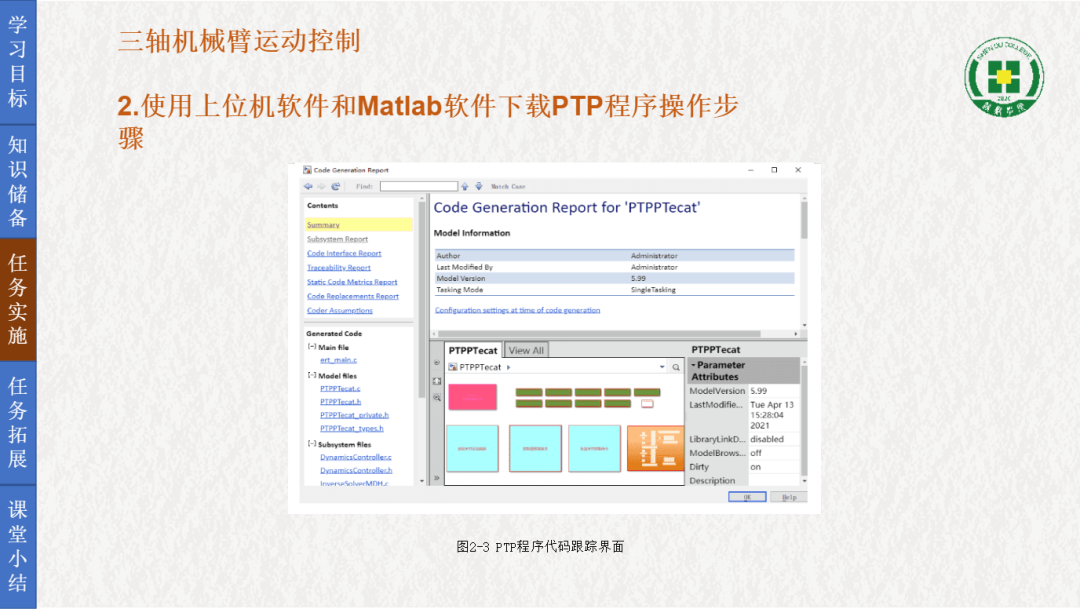
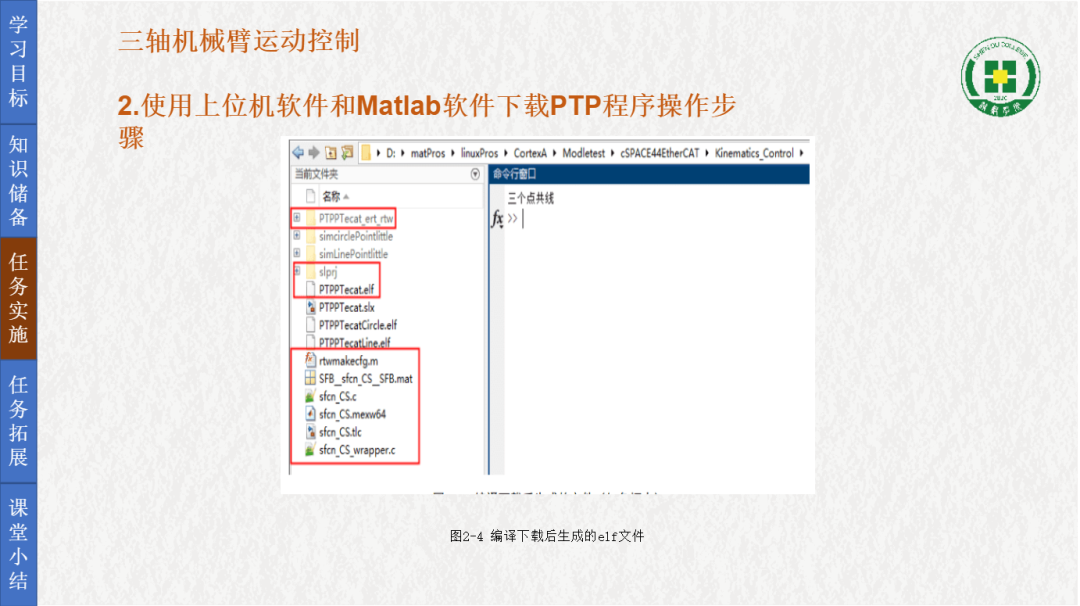
第三步:点击Matlab上方的编译按钮或者按Ctrl+B,将模型下载到机械臂控制器中,编译下载完后,会出现图2-3的界面,点击下方的Simulink模块会自动跟踪对应生成的代码,可视化效果比较好。另外在Simulink仿真模型文件路径中生成新的elf文件如图
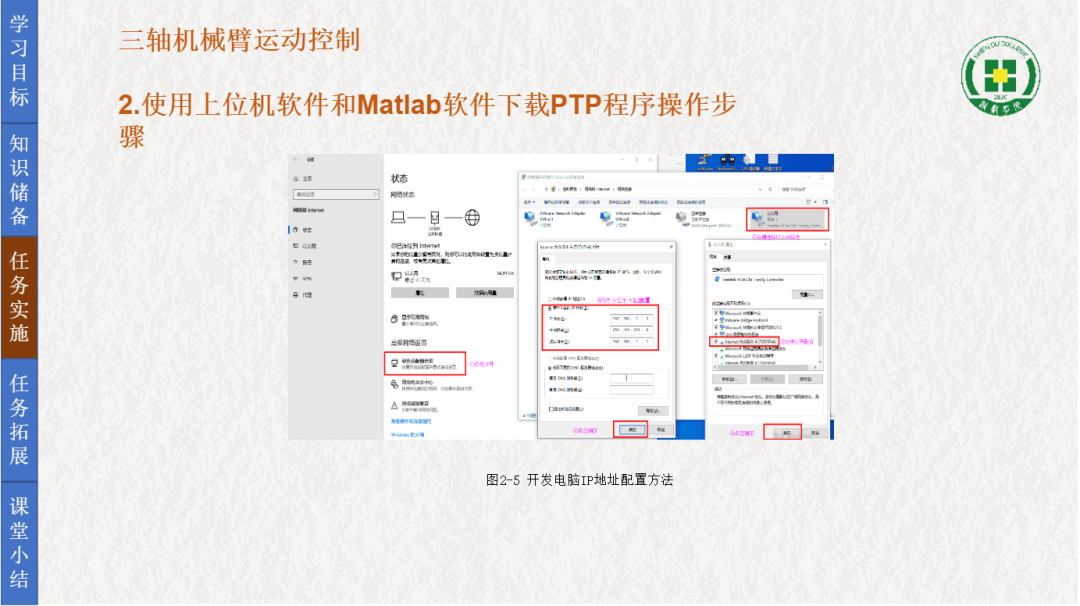
第四步:配置本地开发电脑IP地址。我们采用UDP实现上位机与实时控制器之间的数据通信,为保证通信正常必须两个网络节点在同一个网段。设置方法如图
第五步:下载用户可执行程序。选择图2-6界面上边的“设置”选项,然后按照图上①~④顺序进行操作。其中第3步为选择前边生成的用户可执行代码。然后点击“Send File”则电脑开发机把本地的程序通过网络传输到控制器中,同时进度条会显示下载文件的进度,当显示100%时则表示控制器完全接收到程序文件。此时控制器会自动的把用户程序运行起来。用户应用程序跑起来之后,过5s左右(底层服务程序需要做时钟同步处理),上位机“监控面板”模块会有动态图形滚动显示如表明上位机已经能正常的接收数据,通信是正常的。

第六步:PT轨迹规划上位机操作,使用过程中注意准备好随时按住抱闸(确保安全)操作的步骤是:点击“启动”→点击“到达初始轨迹”→等待到达轨迹第1个轨迹点→点击“开启轨迹运动”→等待全部走完轨迹→点击“停止”。按钮操作界面如图

3、三轴机械臂笛卡尔空间直线轨迹运动实物图解

任务拓展
三轴机械臂运动控制
根据现有的Simulink中的PTP模型,可以尝试自己写笛卡尔空间圆轨迹的程序并进行实物操作,熟悉一下操作流程。Matlab仿真圆形轨迹图如下图所示。
课堂小结
下面我们进行课堂小结:
1、简述控制箱接口资源和三轴机械臂结构组成。
2、学会使用Matlab软件和上位机配合使用下载程序的步骤。
3、使用时要注意与三轴机械臂保持安全距离。