

精品课程推荐 | 开源两轮智能平衡移动机器人电控系统开发
发布日期:2023-01-05 浏览次数:2377
近几年来,移动机器人行业发展迅猛,在巡检、物流、工厂生产搬运、医院、实验室自动化等应用极为广泛。本课程参照国际先进和具有应用潜力的Boston Dynamics的Handle机器人,以两轮平衡移动机器人平台为研究对象和实验载体,围绕基于模型设计的工程方法,设计出两轮平衡移动机器人的自平衡运动控制系统,蓝牙、4G、wifi等无线控制技术,机器视觉和目标识别跟随技术。通过本课程的学习,学员能熟练掌握基于模型设计的工程方法,理解移动机器人的知识和经验,能快速开发出属于自己的移动机器人产品。
01 课程内容介绍
1、智能平衡移动机器人
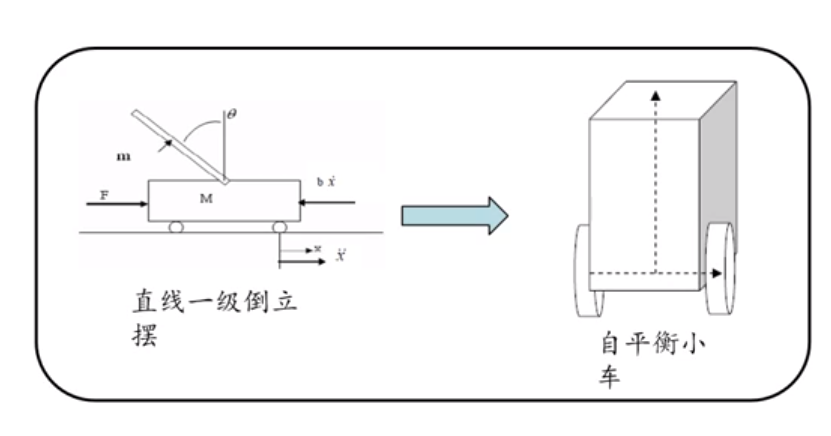
智能平衡式轮式机器人的模型源自经典的倒立摆模型其两轮同轴,主体有沿着轮轴旋转的不稳定趋势,因而控制其重心的位置保持主体的平衡是其区别于其他轮式机器人的主要控制难点,尤其是在运动的过程中保持自身平衡这需要智能平衡机器人能够通过其外部感知器件迅速地检测出自身重心的偏移与绕轮轴方向倾斜角度的变化,传输到主控制器去控制执行部件一一电机的迅速响应,从而能够及时地抵消这种倾斜的趋势来保持可接受范围内的平衡。
2、MBD开发流程
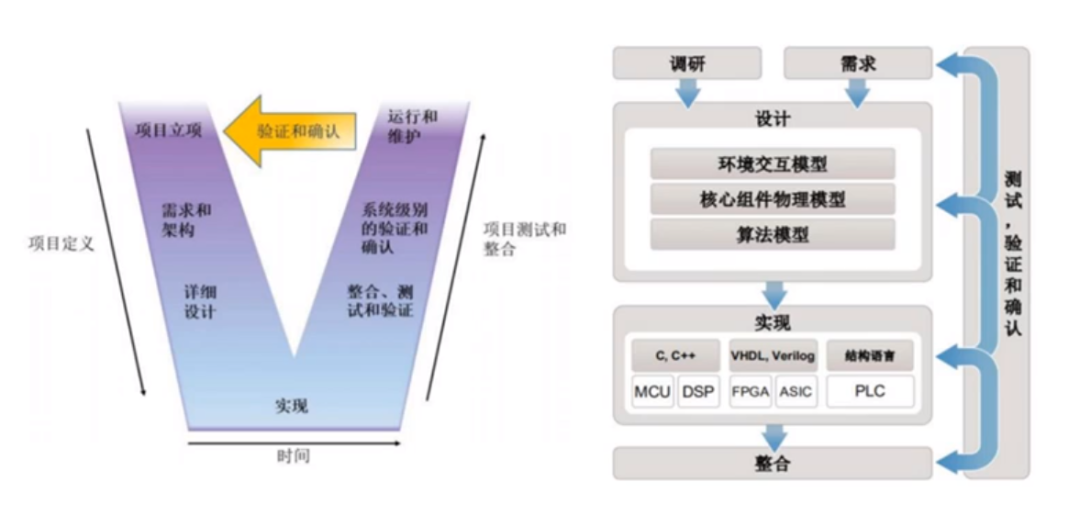
基于模型设计工程方法(Model-Based-Design):主要针对汽车、飞机、机器人等电控系统、雷达导航等信号处理系统、电力系统、通信系统等较复杂的需要单片机或计算机作为主处理器的控制系统设计,综合采用物理建模、计算机仿真、自动代码生成、软件模型与控制器交互测试验证的一种先进的开发方法。
3、智能平衡移动机器人基础知识
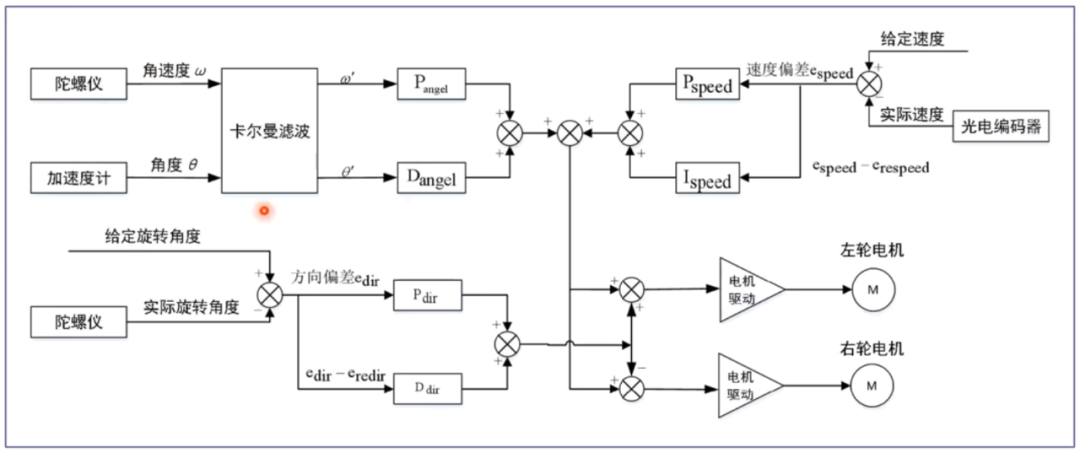
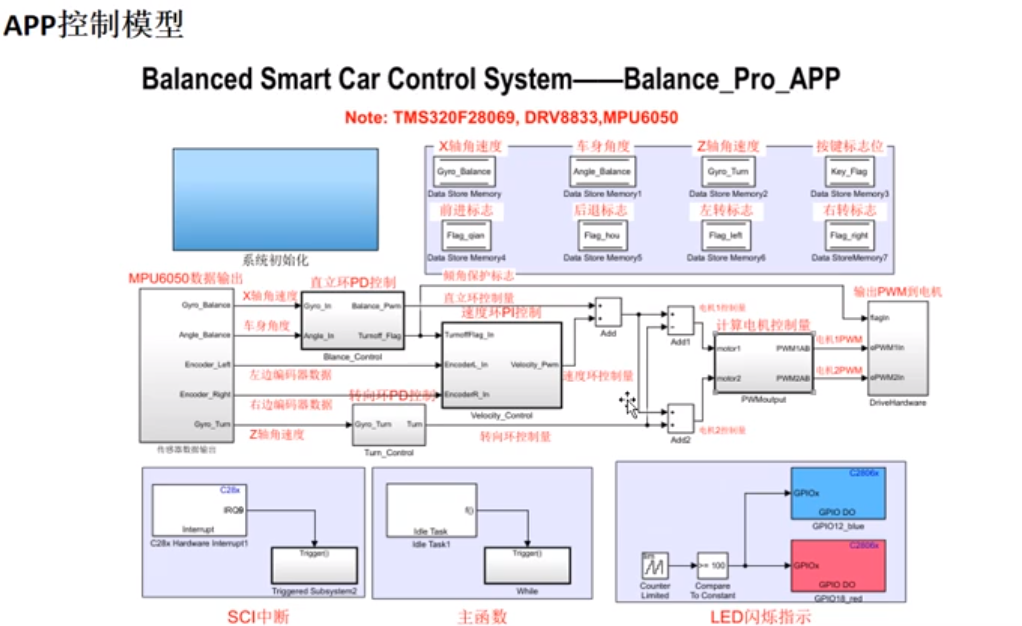
该模块系统介绍了MATLAB软件的应用,平台硬件电路设计,传感器与外设模块,数字控制系统和系统控制器。智能平衡移动机器人PID控制可分解为直立控制、速度控制和方向控制,采用 PID叠加的方法控制驱动电机转速,实现对小车直立、速度和方向的控制。其控制算法总框图如图所示。
02 课程内容
1、智能平衡移动机器人
2、MBD开发流程
3、智能平衡移动机器人基础知识
03 适合人群
· 人工智能、机器人、自动化、控制工程、机械电子、智能制造等专业的全国高校教师、研究生
· 帮助科研院所的科研人员、教师拓宽知识领域
· 机器人相关企业技术负责人/工程师
04 课程优势
1、知识点丰富: 覆盖TI DSP、树莓派、PID自动控制、电机控制、多种传感器的使用、4G和5G远程控制、MBD工程开发方法、机器视觉等。
2、培训讲师拥有开发过众多先进的机器人产品 (伺服驱动、运动控制、协作机械臂、移动机器人、复合机器人等) 实战经验。
3、理实交融,实战训练,能更深入理解和掌握知识。
4、MBD基于模型的设计理念打破了原有的产品开发思路,将设计任务从实验室和现场转移到电脑桌面,充分利用物理建模、仿真、自动代码生成进行实时控制、HLL硬件在环仿真等技术,从而改变工程师和科学家的工作方式,可以使产品设计开发”只做一次,一次成功”,很多的研究能将开发时间和成本减少50%以上。
05 精彩内容
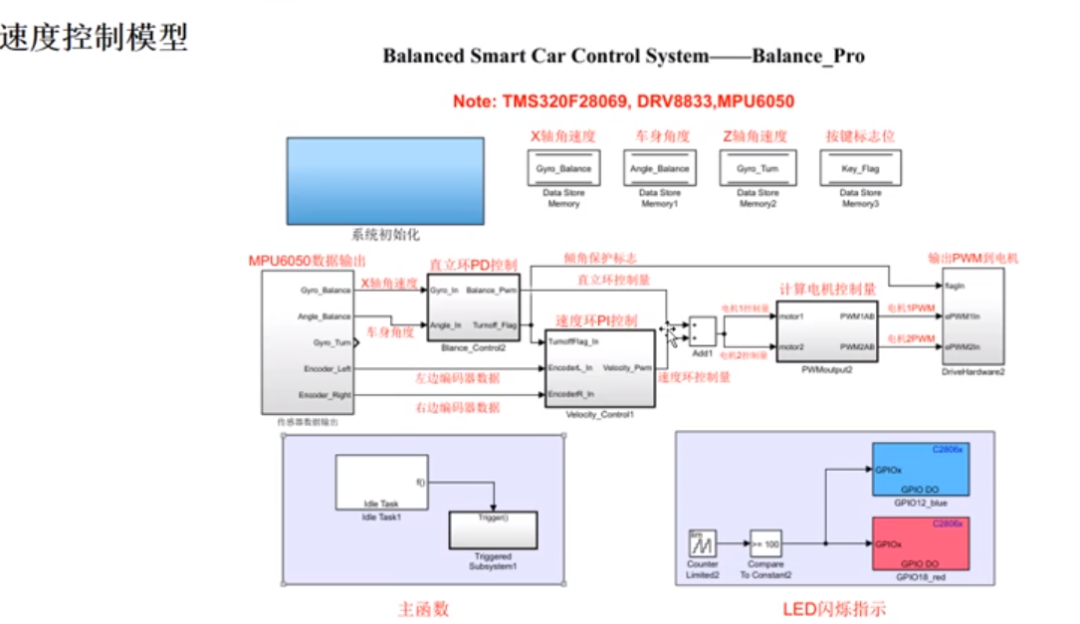
智能平衡移动机器人综合应用——速度环、APP控制、红外循迹

如果你也对两轮智能平衡移动机器人兴趣,如果你想掌握Simulink基于模型设计整套流程及机器视觉等核心内容和关键技术,如果你想要具备独立开发移动机器人的能力和提升软件开发能力、分析能力、设计能力、代码文档管理及展示能力,快来和深谷小助一起学习吧!


