

精品课推荐 | 零基础入门ROS系列课程(移动机器人)
发布日期:2023-02-02 浏览次数:2558
ROS是机器人与人工智能开发与研究领域最为流行和通用的工具。国际及国内顶级大学(如CMU、MIT、斯坦福、宾大、东京大学、哈工大、清华、浙大等)和几乎涉及机器人领域的所有科技公司(波士顿动力、微软、Intel、Google、百度、英伟达、SoftBank、科大讯飞、大疆、优必选、华为等)都在深入研发、布局ROS机器人生态。
传统机器人厂家都是根据自身硬件的实际情况编写符合需要的功能,但代码的复用率低,且各个厂家的算法代码也不通用;而ROS为了解决在机器人研发中遇到的上述问题,为代码复用及操作系统服务提供了支持:硬件抽象、底层设备控制、共用功能执行、进程间消息传递及包管理。
通过长达十几年时间的迭代与改进,ROS基本已在机器人领域普及,并成为主流的机器人开发系统。ROS自诞生以来被广泛应用于服务机器人、工业机器人、无人机、无人驾驶等领域。熟练掌握ROS系统原理和操作已成为机器人开发的重要一环,并逐渐成为机器人企业招聘人才的基础要求。
01 课程内容介绍
以迷你机器人TianbotMini为载体,展开对智能移动机器人相关技术(SLAM建图导航、机器人学习等)的体验、编程以及ROS机器人的二次开发进行讲解。课程中通过设置多个小任务,每个任务尽可能使用不同的技术方式实现,来为学习者呈现使用ROS机器人操作系统与传统方式在用机器人解决实际问题时的不同。在课程的最后,我们将结合创客领域相关技术(Arduino,3D打印,PCB设计等),拓展迷你机器人的功能与应用场景,展示如何将创客技术与ROS机器人操作系统进行有效的结合。为学习者讲述ROS机器人操作系统作为构建智能机器人的工具如何应用于实践。
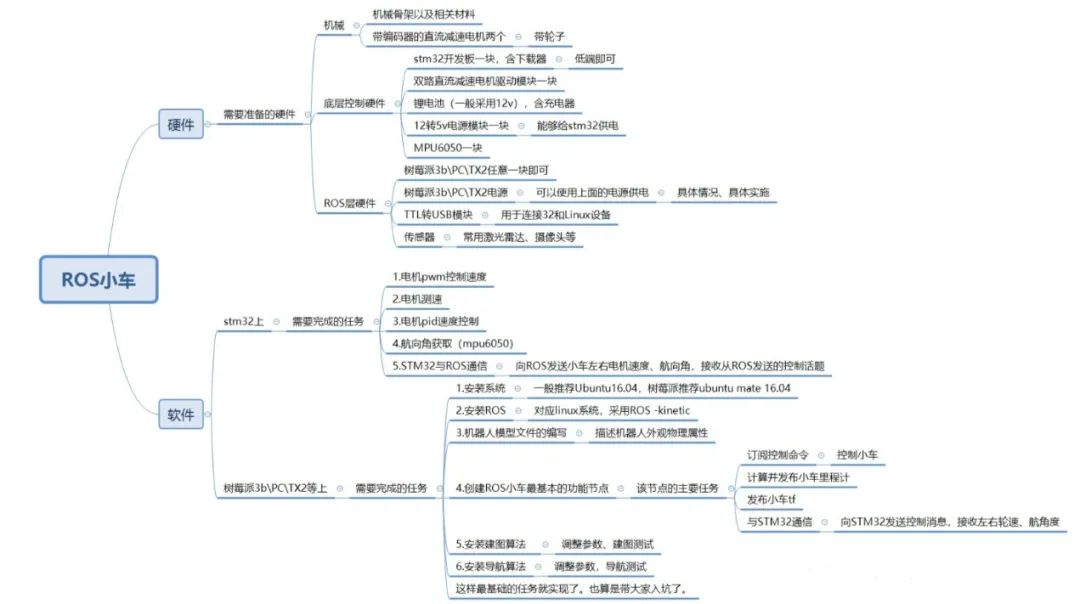
图 | ROS小车的开发流程

图 | 迷你机器人TianbotMini
02 课程内容
快速体验SLAM建图导航
机器人入门直播课程计划
各种技术在迷你机器人上的实现
机器人仿真与前端仿真实现
命令行工具另类讲解
使用ROS中的话题与消息让机器人动起来-编程实战
里程计和可视化工具
ROS中如何发布机器人话题--编程实战
ROS中如何订阅机器人话题--编程实战
ROS中如何既订阅又发布话题--编程实战
ROS中多机器人互动实验--任务展示
机器人抽象层:机器人在ROS中的‘呈现方式
话题转发:同时控制多个机器人的利器
多机器人配置:配置迷你机器人进入组团模式
任务讲解:仿真与真实迷你机器人的梦幻联动
03 适合人群
· 英语、编程、算法基础薄弱的人工智能初学者;本科生、研究生、博士生及部分老师
· 需要撰写文献综述和论文的学术界研究者
· 人工智能岗位求职及在职人员:产品经理、计算机视觉算法工程师、机器学习算法工程师、深度学习算法工程师、人工智能算法测试工程师
· 没时间读、不敢读、不愿读、读得少、读不懂、读不完、读不精计算机视觉原始论文的同学
· 研发团队全程技术支持,帮你解决问题,让你少走弯路,快速掌握;
· 如何进行多设备快速开发;
· 环境感知、自主决策、集群协同等;任务牵引、理论实践相结合;
· 让你在动手实践中掌握智能无人系统的设计方法和系统集成!
05 精彩内容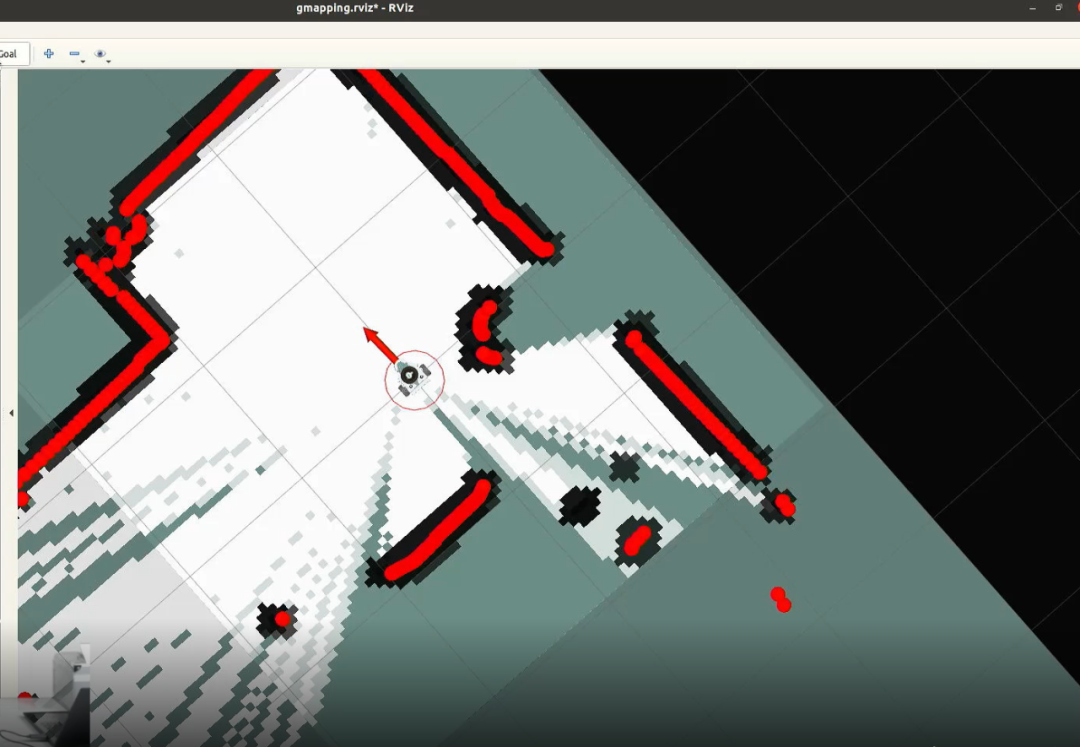
图 | ROS小车导航时的截图
 图 | 传感器仿真
图 | 传感器仿真
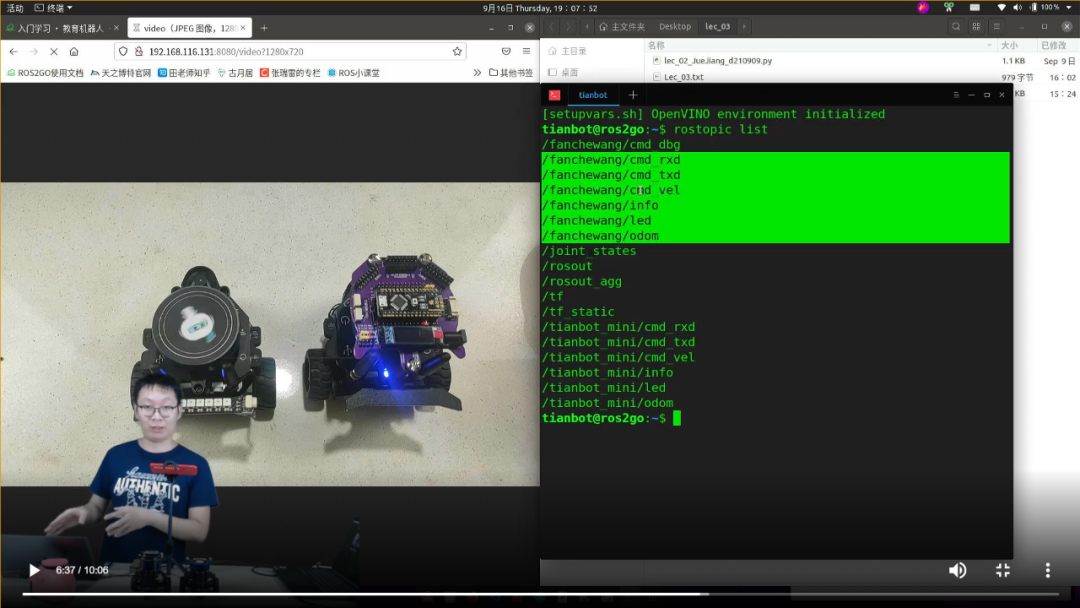 图 | 多机器人互动
图 | 多机器人互动
如果你也对ROS感兴趣,
如果你想了解ROS操作的知识
深谷小助一起学习吧!


