深谷技术 | 永磁同步电机参数辨识算法研究综述
发布日期:2023-02-14 浏览次数:2680
永磁同步电机( PMSM) 具有结构简单、功率密 度大、故障率低和运行效率高等技术优势,广泛应用 于工业伺服驱动、新能源汽车以及新能源发电等领域。上述应用领域对系统控制精度及运行可靠性均有严格要求,而 PMSM 尤其是内嵌式永磁同步电机( IPMSM) 由于自身结构及功率密度的限制,其电磁参数在不同运行工况下将发生变化,严重影响控制器性能,降低系统运行质量甚至影响系统的运行稳定性。
永磁同步电机具有体积小、转动惯量低、结构简单等优点,被广泛应用于控制系统中。然而在实际应用过程中,控制系统会受到高温、负载等外界因素的影响,永磁同步电机的电感、转子磁链等参数会发生变化,导致系统振荡,影响实际控制效果。因此精确的参数辨识是为了达到更好地控制效果的必要条件。
辨识一般分为离线辨识和在线辨识。
离线辨识:离线辨识,就是在系统模型结构已知的前提下,获得所有的信息和数据之后,使用相匹配的算法集中对数据进行处理,然后得到参数的递推估计值。其原理简单,操作方便,且不需要编写复杂的算法,但是其需要进行大量的数据存储和运算,因此对计算机的内存和容量要求很高,且辨识收敛时间长。离线辨识方法主要有加减速法、减速法和转矩限幅加速法等。具有对计算机要求高,辨识时间长、辨识精度不高、不具有实时性等缺点的离线辨识技术,一般不适合应用在高性能和高精度的交流伺服控制系统中。
在线辨识:随着微处理器的更新加快以及现代控制理论的发展,大量现代控制理论应用到了电机控制领域中,而转动惯量的辨识不再局限于以往简单粗略的计算方法。因此可以将控制理论中的估计方法应用到电机调速系统的参数辨识中,并形成一系列在线参数辨识的理论。在线辨识的原理是:在系统模型结构已知的前提下,获得小部分试验数据之后,立即使用辨识算法处理已获得的数据,若处理后得到的参数辨识结果精度较低,则可以通过获得新的数据,不断地对原先的辨识结果进行修正,最终得到比较准确的辨识值。其优点在于:非常适用于实时的控制过程,数据计算量较小,对计算机的存储量要求不高,辨识精度较高;但缺点是应用过程中需要考虑算法的适用性,而且编写算法有难度,辨识结果的精度也会受到辨识算法本身特性的影响。
目前常用的电机在线参数辨识方法有:最小二乘法、卡尔曼滤波算法、模型参考自适应法。
1. 最小二乘法参数辨识
高斯在解决天体运动轨道问题时提出了最小二乘法的相关理论,最小二乘法虽然简单,但是如果数据量特别大并且不停地更新,采用最小二乘法将十分消耗控制器的资源,采用递推最小二乘法可以解决这个问题。递推最小二乘法 (Recursive Least Square,简称RLS)就是当被辨识系统在运行时,利用新引入的观测数据对前次估计的结果进行修正,得出新的参数估计值,减少估计误差。这样,随着新观测数据的逐次引入,一次接一次地进行参数估计,直到参数估计值达到满意的精确程度为止。
2. 模型参考自适应法(MRAS)参数辨识
起初,模型参考自适应系统(MRAS)主要用于航空航天,由于飞机在大气环境下机身参数会不停的发生改变,要保证飞机在飞行过程中的安全性和可靠性,那么人们以前使用的经典控制理论完全不能够满足要求,这才促使研究学者探索出 MRAS 用来控制复杂、多变的系统,自适应控制主要针对可变的控制系统,尤其针对随时发生变化、非线性和不确定的系统。MRAS 可以根据所控制对象的参数变化和外界扰动等因素自动做出相应的调整,使得该系统具有很强的稳定性。上述所说的“不确定性”主要是指相关系统在运行过程中自身的数学模型和周围相关因数十分不确定的情况,也包括许多未知参数的变化。
MRAS 主要由三部分组成,分别是可调模型、参考模型以及参数自适应律。MRAS的辨识思想是将参考模型和可调模型中含有相同的电机辨识参数分别当作已知参数和未知参数,并且两种模型之间输出的物理意义是相同的,对两种模型进行作差处理,然后建立恰当的参数自适应律对电机参数进行辨识,MRAS 的基本结构框图如图所示。
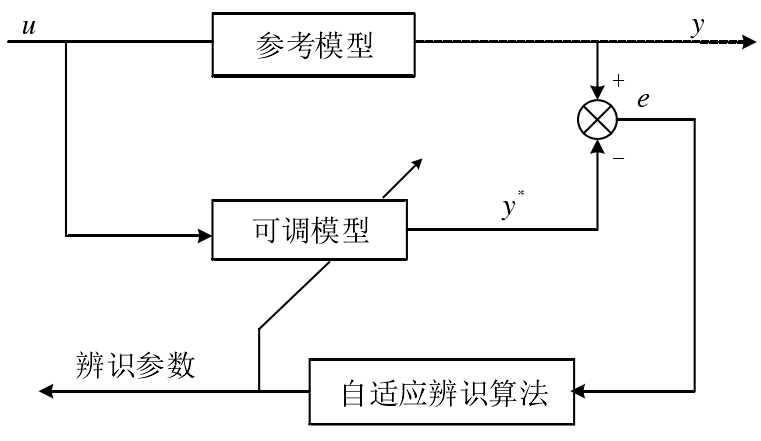
模型参考自适应系统(MRAS)具有算法简单、抗干扰性能好、模型搭建容易等优点,已普遍应用于无传感器 PMSM 控制领域。在基于 MRAS 无速度传感器的转速辨识系统中,能够测量的只有永磁同步电机的定子电压和电流,所以我们把位于 d-q 坐标下电压方程作为 MRAS 转速辨识系统的状态方程,而 d-q 坐标下的电流方程可以通过等效变换求出,由于电流方程中包含转子的转速信息,所以转子的转速信息就可以被当作待辨识参数。
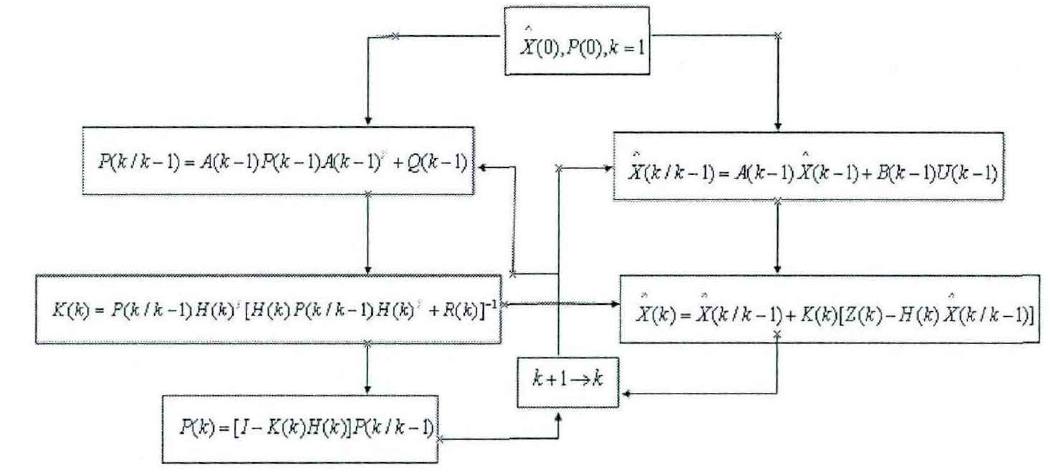
3. 扩展卡尔曼滤波法(EKF)参数辨识
卡尔曼滤波是于年提出的从与被提取信号有关的观测量中通过算法估计出所需信号的一种滤波算法。他把状态空间的概念引入到随机估计理论中,把信号过程视为白噪声作用下的一个线性系统的输出,用状态方程来描述这种输入一输出关系,估计过程中利用系统状态方程、观测方程和白噪声激励的统计特性形成滤波算法。次年,他又与布西合作,把这一滤波方法推广到连续时间系统中去,从而形成滤波估计理论。该理论一经提出,立即应用到实际工程。
实际上,滤波是一套由计算机实现的实时递推算法,它所处理的对象是随机信号,利用系统噪声和观测噪声的统计特性,以系统的观测量作为滤波器的输入,以所要估计值系统的状态或参数作为滤波器的输出,滤波器的输入与输出之间是由时间更新和观测更新算法联系在一起的,根据系统方程和观测方程估计出所有需要处理的信号。