

深谷技术 | 基于模型设计开发并联机器人
发布日期:2023-02-23 浏览次数:2484
并联机器人是具有两个或两个以上自由度,上下平台用两个以上分支相连,且以并联方式驱动的机构,即组成机器人机构的各驱动机构形成多个封闭的构件系统。并联机构相较于串联机构,具有刚度大,机构稳定,承载能力大,微动精度高,运动负荷小等优点。在位置求解上,串联机构正解容易,但逆解十分困难,而并联机构正解困难,逆解却非常容易。由于方程组的高度非线性,使得并联机器人的运动学正解问题一直是并联机器人研究的难点。由于机器人在线实时计算是要计算逆解的,这对串联式十分不利,而并联式却容易实现。本章将通过对并联机器人的运动学分析,详细介绍逆运动学的算法,并结合Matlab/Simulink仿真软件,验证算法的准确性。同时,将介绍并联机器人杆长空间轨迹规划及其运动控制。
并联机器人分析主要是从运动学角度对并联机器人的结构和性能进行分析,涉及并联机器人的运动学正解、逆解以及其运动学性能评价参数。以下主要介绍Stewart并联机器人逆解的数值解法。
一、并联机器人逆解分析
如图1所示为六自由度Stewart-Gough并联机器人的三维模型图,移动平台和固定平台之间通过六根相同的伸缩杆连接,伸缩杆与两个平台之间均采用球运动副连接。移动平台和固定平台上的六个球运动副成对安装在平台上,且三对均布在平台同一圆周上。实际应用中,根据不同的使用要求,伸缩杆可为电缸、液压缸或气缸。移动平台为末端执行器,伸缩杆为驱动器。
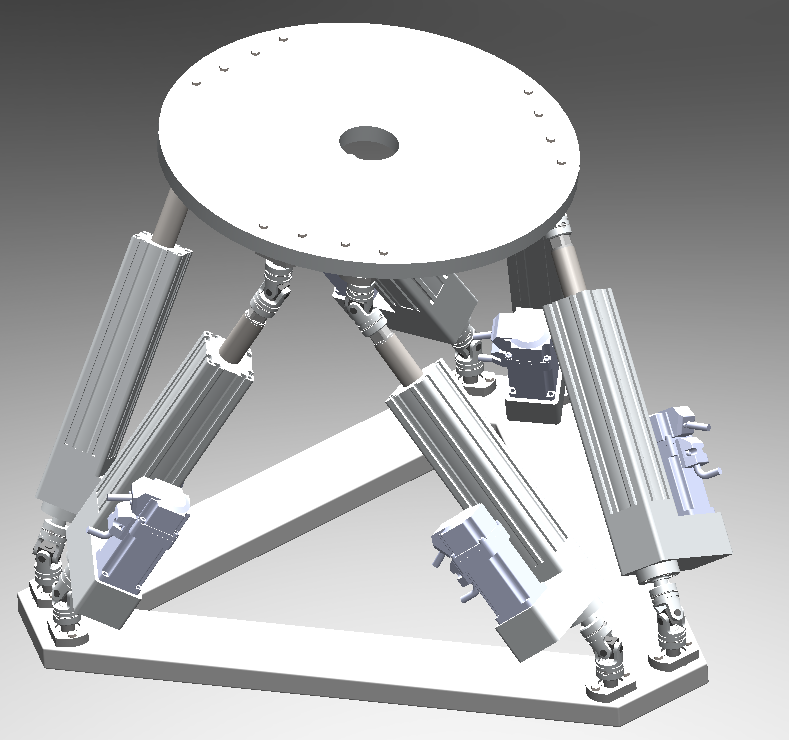
图1 Stewart平台模型
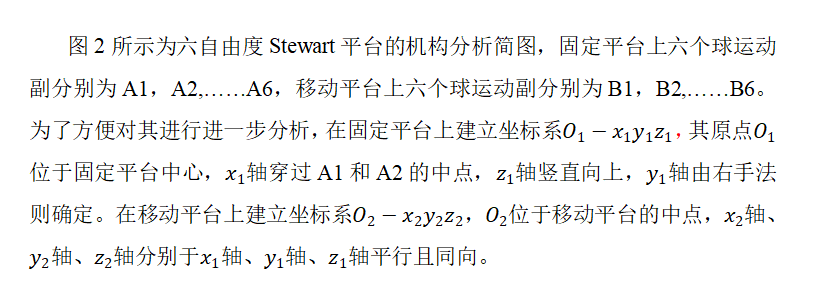
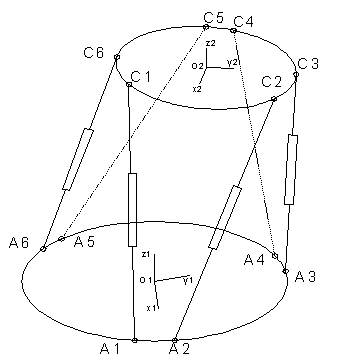
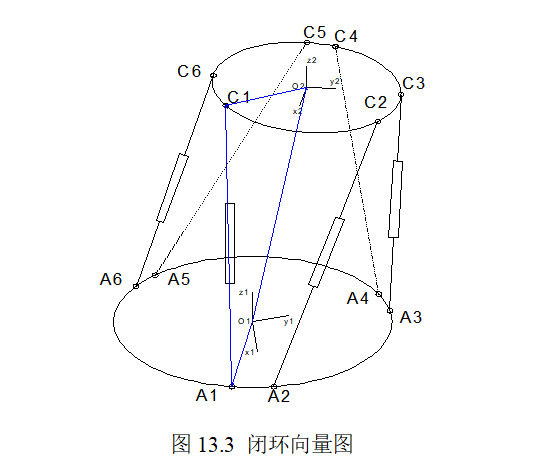
图2 Stewart平台的机构分析简图


二、逆向运动仿真
在并联机器人实际应用中,通过给定末端位置,经由逆解算法解算出并联机器人六个伸缩杆杆长长度,解算出的长度值通过控制器给到驱动器,伸缩电缸的电机在驱动器的作用下转动,使得各个伸缩杆末端到达目标长度。
下面对Stewart模型逆运动学进行仿真。
有,
可得:
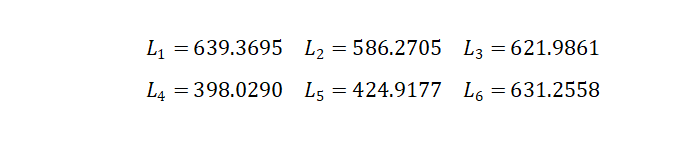
通过MATLAB simulink的M Function模块封装并联机器人杆长运动控制程序,并给出六个输入参数,经由算法解算出并联机器人六个伸缩杆杆长长度。在实物控制过程中,解算出的长度值通过控制器给到驱动器,伸缩电缸的电机在驱动器的作用下转动,使得各个伸缩杆末端到达目标长度。搭建的运动学仿真系统如图3 逆向运动学仿真图所示。
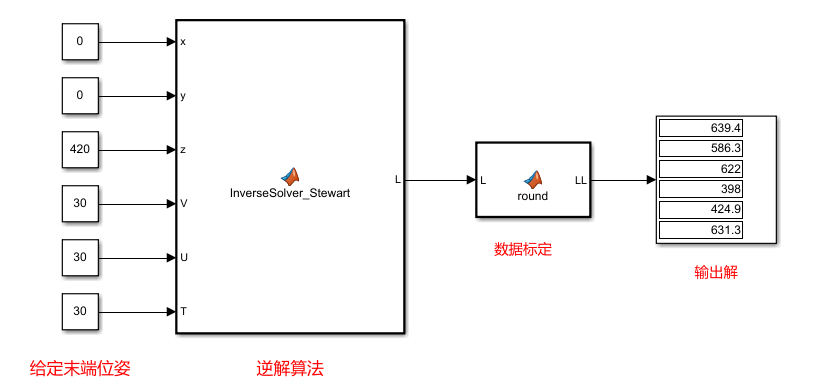
图3 逆向运动学仿真图
下面将结合三次多项式插值算法对并联机器人进行关节空间轨迹规划仿真通过以上分析,可以计算伸缩杆在满足速度要求的起点到终点之间运动规划情况。如图4所示是三次多项式MATLAB仿真分析,图5是轨迹规划算法模块图:要求机器人某一关节在10s内,由初始点A到终点B的运动变化情况。
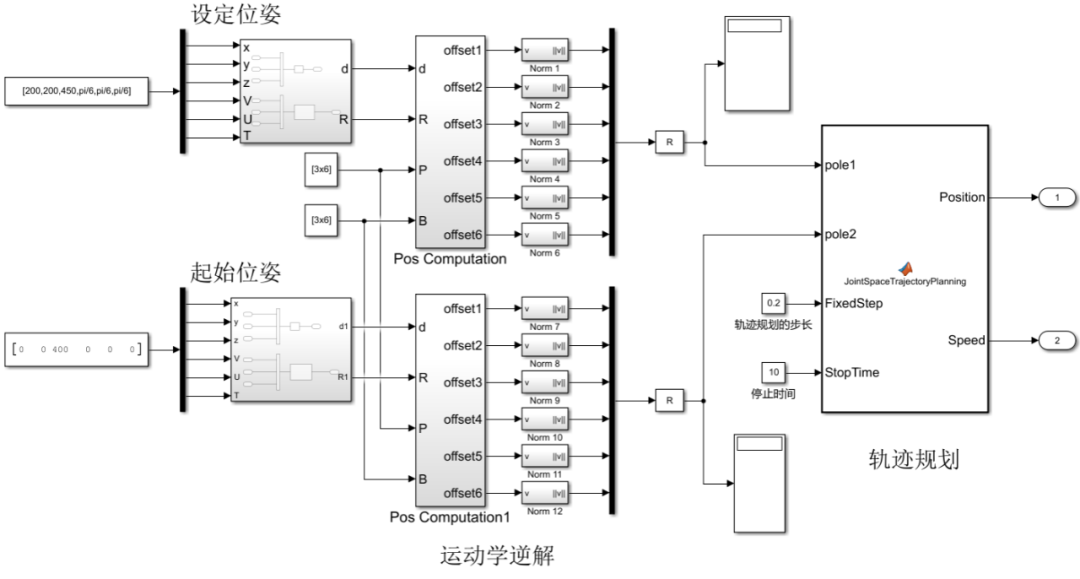
图4 simulink轨迹规划仿真
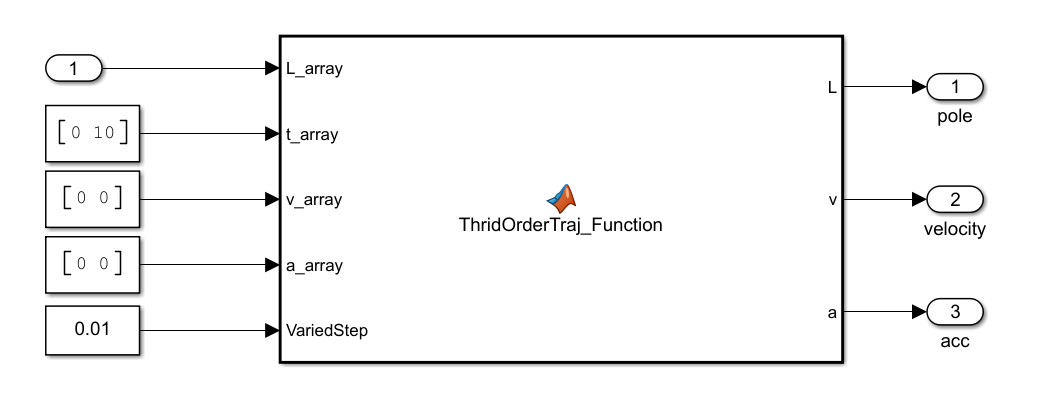
图5 simulink轨迹规划算法模块
运动规划过程中杆长变化及速度、加速度变化如图6-8所示:
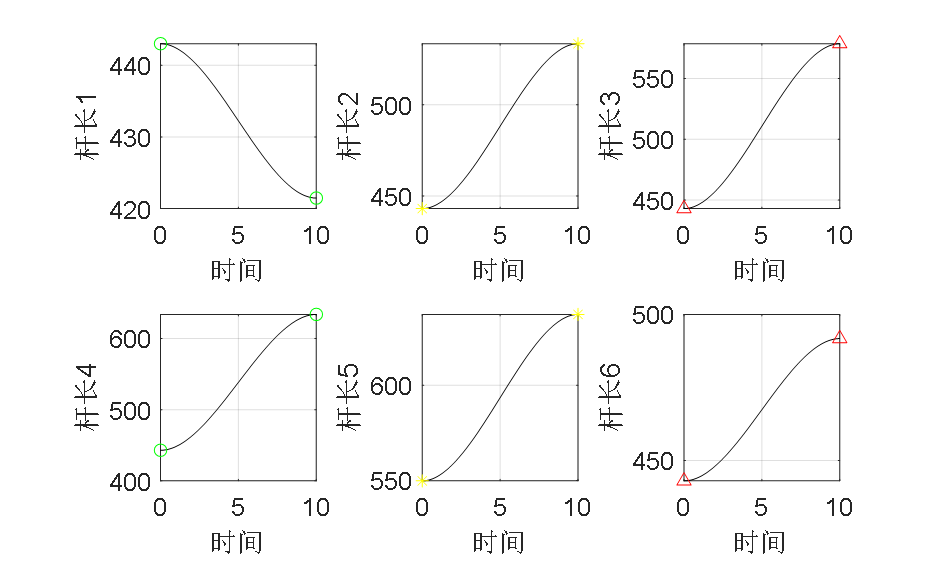
图6 运动规划杆长变化图
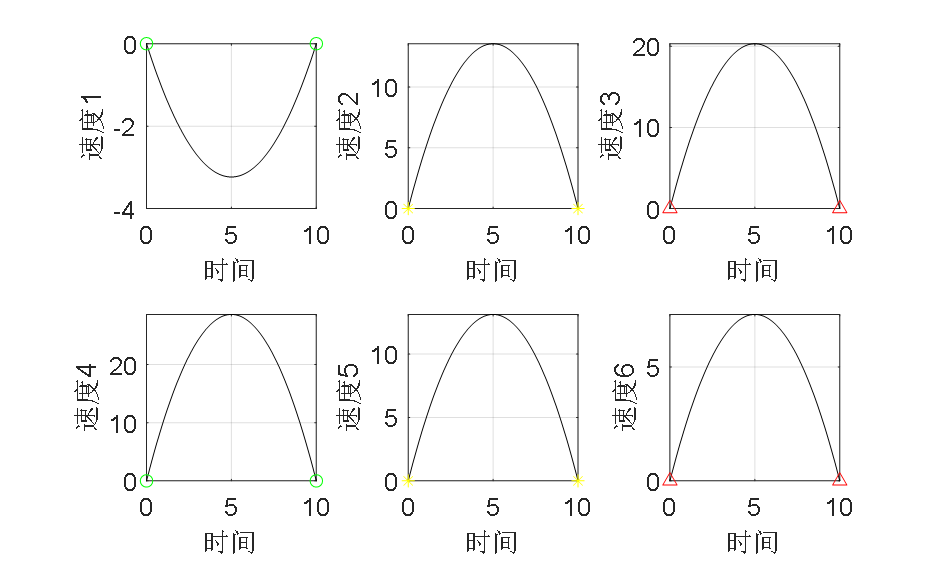
图7 运动规划速度变化图
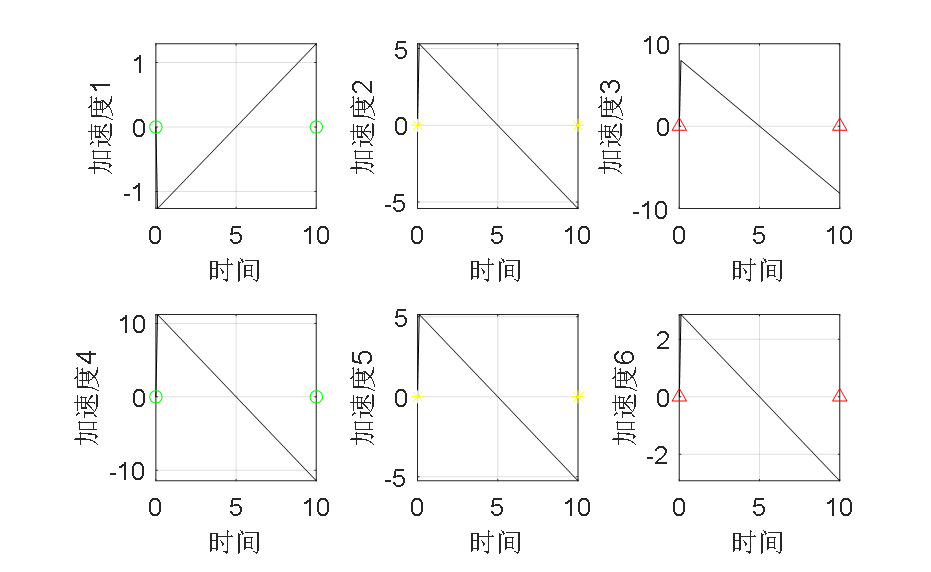
图8 运动规划加速度变化图


