

深谷动态 | 中科深谷技术首席陈现敏博士为陕西理工大学作学术报告
发布日期:2023-03-15 浏览次数:2565
为进一步推动产教融合、培养高素质应用型、复合型、创新型人才,近日,中科深谷技术首席陈现敏博士应邀为陕西理工大学机械工程学院师生作学术报告。本次报告以《3D视觉、柔顺控制在精密装配中的应用研究》为主题,机械工程学院的自动化、机械等专业学生以及老师参加,报告会由陕西理工大学机械学院自动化重点实验室常务副主任张鹏超主持。

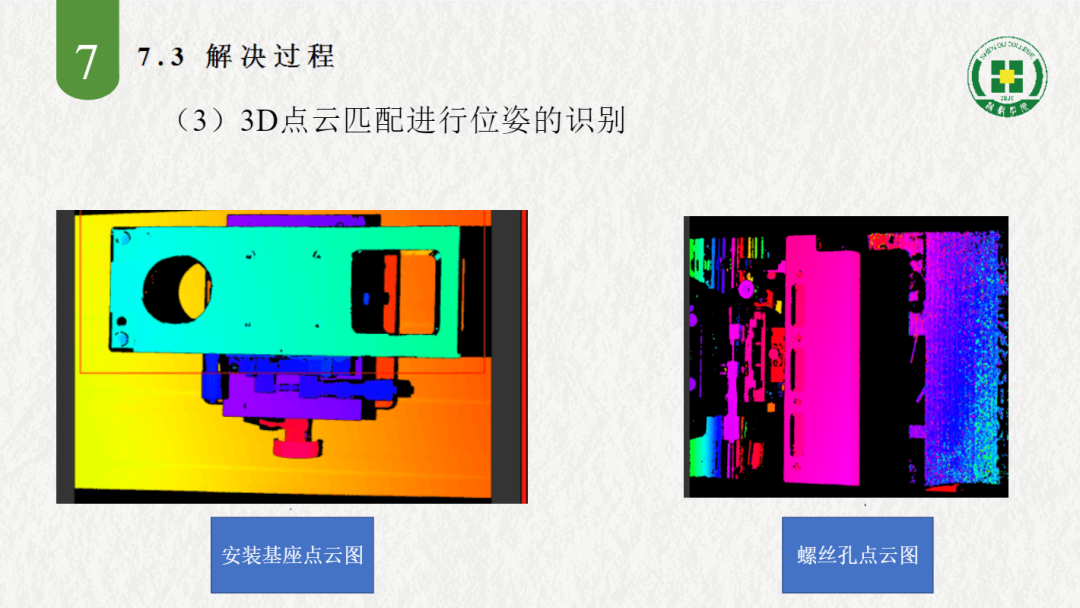
陈现敏首先介绍了3D视觉技术原理及3D视觉用途,从智能化转型来看,3D视觉技术已经成为智能终端必不可少的AI“慧眼”。报告中讲述了采用了结构光的3D视觉技术,进行工件和安装基座的识别,并引导机械臂进行定位控制,进而实现装配,识别精度优于0.2mm。

随后,陈现敏详细的讲解了精密装配的实际运用到的机械臂运动学和动力学的技术原理,特别强调了阻抗的概念、阻抗控制的技术原理、以及理论技术如何解决工程实践中的问题,陈博士汇聚声色的讲述中科深谷在精密装配行业中的实际案例,把协作机器人、柔顺控制、3D视觉和深度学习及其在检测中的应用融合起来,现场的老师、学生表示很有学习借鉴的意义。
报告中的3D视觉、协作机械臂的运动学、动力学、柔顺控制等技术与很多研究生的研究方向很符合,引起很多学生的讨论。

在交流互动环节,陈现敏回答了同学们提出的问题,解答了大家在学习研究中遇到的一些困惑。
问题一:有3D激光雷达能感知周围环境和物体,为何还要用3D视觉?
解答:3D激光雷达价格昂贵,相比较3D相机便宜很多;3D激光雷达一般用16线,128线,能采集的信息还是不够的,而3D视觉采集的信息是全景的;3D激光雷达的优势明显,抗环境干扰能力强,尤其是对于自动驾驶,还用到毫米波雷达,大雾天气,都能探测前方的障碍物,视觉是不行的,特斯拉只用8个摄像头感知周围环境,确实技术非常厉害,不过国内的厂商基本都用多传感器融合的方式来感知周围环境。

问题二:对试管等半透明、透明物体的检测有哪些经验?在做相关的项目?
解答:这方面还没有做过测试,可以用不同的视觉系统来检测,如果点云信息完整,就可以应用(并展示了我们做的舵机装配中舵机工件完整的3D点云信息)
最后,陈现敏从技术、产业、学科等多方面给师生讲解了中科深谷在3D视觉、柔顺控制在精密装配的应用案例中存在的问题及解决方案,报告内容丰富,通过易懂的语言丰富了同学们的理论知识,开拓了同学们的视野。
中科深谷3D视觉、柔顺控制在精密装配中的应用案例
中科深谷在精密装配行业深耕多年,凭借过硬的产品实力和良好的服务,获得汽车零配件、航空航天领域装配部件等行业装配用户的选择和认可,积累了丰富的精密装配中的应用案例及项目经验,可为用户提供软硬件的成熟的解决方案。
01、螺丝锁付双臂机器人系统助力汽车零配件行业自动化改造
该方案通过采用CSPACE实时仿真控制系统,针对于开源3D视觉精密装配与螺丝锁付双臂机器人,核心运动控制系统和伺服驱动器全自主开发。采用3D视觉引导机械臂实现精密抓取和定位装配。基于模型设计(MBD)工程开发方法实现机械臂运动学、动力学算法开发与应用,提供丰富的控制案例程序,配套有上位机监控软件,可实时在线修改控制参数、监控机械臂的参数,不仅方便教学,还能为深层次的协作机械臂或相关的机器人科研提供支撑。
02、双臂协作机器人装配系统在航天航空领域的应用
面向航天航空领域总装力控柔性装配任务的双臂协作精密装配机器人系统,目前可实现批量、重复、工艺过程相对较简单的工作进行自动化替代,提高生产效率以及装配质量。其总体机械结构如下:

中科深谷历来重视产学创新与校企合作,并已获批成为机器人、人工智能、智能制造、物联网实训基地。未来,中科深谷将持续与陕西理工大学通过校企合作、产教融合、实践实习等活动,并结合汉中当地特色的航空产业,共同推动产学研深度合作,助力人才培养与产业发展。


